Die Form des Getriebes hängt von seinen Abmessungen und der Serienproduktion ab. Wenn keine Anweisungen zum Kursdesign für die Serialisierung der Getriebeherstellung vorhanden sind, kann dies festgelegt werden, wobei die Einzel- und Kleinserienfertigung bevorzugt wird. In fig. 4.1 zeigt die einfachste Form von Rädern, die in einer Einzel- und Kleinserienproduktion hergestellt werden.
Bei kleinen Raddurchmessern bestehen sie aus Stab und bei großen Radrohlingen werden sie durch Freiformschmieden mit anschließendem Drehen hergestellt. Um den Umfang der Präzisionsbearbeitung zu reduzieren, werden an den Radscheiben Hinterschneidungen vorgenommen. Mit durchmessern da< 80 мм эти выточки, как правило, не делают.
Länge les ist ratsam, dass die Radbohrung mindestens der Breite entspricht b2 Zahnräder. Die Länge der Nabe lder Artikel ist auch mit den Berechnungen der Verbindung (Keilnut, Keilverzahnung oder mit einer Spannung) abgestimmt, die zum Übertragen des Drehmoments vom Rad auf die Welle (oder von der Welle auf das Rad) gewählt wird, und mit dem Durchmesser des Befestigungslochs d:
lst = (0,8 ... 1,5) d, gewöhnlich lst = (1 ... 1,2) d.
Der überstehende Teil der Nabe weist in Richtung der axialen Kraft im Eingriff auf. Bei einstufigen Getrieben sind die Räder mit einer Nabe hergestellt, die symmetrisch in beide Richtungen von der Radscheibe absteht.
Durchmesser dscharniere sind je nach Material des Rades vorgeschrieben: für Stahl - dst = (1,5 ... 1,55) ∙ d; für gusseisen - dst = (1,55 ... 1,6) d; für Leichtmetalle - dst = (1,6 ... 1,7) d; kleinere Werte sind für die Keilwellenwelle mit dem Rad groß - für die Nut und die Verbindung mit der Spannung.
Breite S die enden des zahnkranzes nehmen S= 2,2 ∙ m + 0,05 ∙ b 2 ,
wo m- Getriebemodul, mm.
An den Enden des Zahnkranzes werden Fasen ausgeführt, wenn die Härte der Arbeitsflächen der Zähne weniger als 350 HB beträgt. f45, mit höherer Härte - bei einem Winkel von 15 ... 20 für die gesamte Zahnhöhe. Gewöhnlich f = (0,5...0,6)m.
Bei der Massenproduktion von Rädern werden durch Freiformschmieden Rohlinge hergestellt (Abb. 4.2) und bei einem jährlichen Radleistungsvolumen von mehr als 100 Stück werden doppelseitige Matrizen verwendet (Abb. 4.3).
 | |
| Abb. 4.2 | Abb. 4.3 |
Für das freie Ausheben der Zuschnitte aus dem Stempel werden die Werte der Prägung der Steigungen 7 und der Krümmungsradien verwendet R 6 mm.
Mit = (0,35...0,4) ∙ b 2 .
4.2. Zylindrisch zahnräder Innenverzahnung
Abmessungen dst lst S, f Die Hauptstrukturelemente der Innenzahnräder (Abb. 4.4) basieren auf den Verhältnissen der Außenzahnräder.
Die Gestaltung der Innenzahnräder kann gemäß einer der in Abb. 1 gezeigten Optionen ausgeführt werden. 4,4 a, b und unterschiedliche Anordnung der Nabe relativ zum Zahnkranz: a - Die Nabe befindet sich im Inneren des Rades, was im Vergleich zur Option die besten Bedingungen für den Betrieb des Getriebes bietet bbei dem die Nabe aus der Kontur des Zahnkranzes genommen wird. Jedoch Option a kann für den Fall verwendet werden, dass zwischen der Radnabe und der Innenfläche des Zahnkranzes ein Verzahnungsdolbyak angeordnet ist, der dazu dient, die Zähne des Rades herzustellen.
Tabelle 4.1
| mmm | 1,5 | 2,0 | 2,5 | 3,0 | 3,5 | 4,0 | 5,0 | 6,0 | 8,0 |
| Demm | |||||||||
| amm |
Größe a Die Nuten in den Stirnrädern der Innenverzahnung nehmen um 30 ... 40 zu. Die Tiefe der Rillen nimmt in allen Fällen zu
h = 2,5mRadstärke Mit = (0,3...0,35) ∙ b2.
Kegelräder
Konische Formen zahnräder mit Außendurchmesser der Zahnspitzen dae 120 mm sind in Abb. 4,5.
In einem Teilungswinkel des Kegelrades 30< < 45 допускаются обе конструкции kegelräder. Die Größe der Radnabe wird durch die Empfehlungen für zylindrische Zahnräder bestimmt.
Wenn der Außendurchmesser der Radzähne 120 mm überschreitet, können die Radkonstruktionen in Abb. 4,6.
Entsprechend der Form in Abb. 4,6 a Designräder in Einzel- oder Kleinserienfertigung. Räder mit kleineren Durchmessern werden durch Drehen von einer Stange (von einem zylindrischen Block), große Räder hergestellt - durch Schmieden und anschließendes Drehen.
Nach fig. 4,6 b konstruieren kegelräder in Großserienfertigung. Dünne Linien zeigen die Konturen des Radrohlings, die durch Schmieden in doppelseitigen Werkzeugen (Stanzen) erhalten werden.
Bei jeder Radform sind die äußeren Ecken der Zähne stumpf mit einer Fase
f 0,5 ∙ m Die Breite des Zahnkranzes ist gleich S = 2,5m e +2 mm. Das Ende der Zahnkranzbreite b = 0,7 ∙ S Wird verwendet, um die Werkstückräder in das Gerät einzubauen, wenn Zähne an der Maschine geschnitten werden. Um die genaue Menge zu reduzieren bearbeitung Nuten mit einer Tiefe von 1 ... 2 mm ausführen.
Wellen - Zahnräder
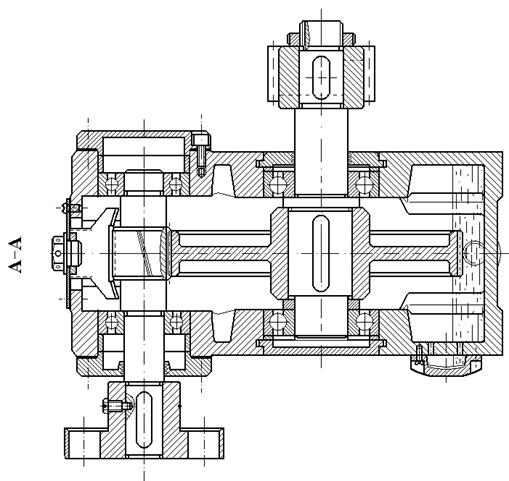
Grundsätzlich sind zwei Ausführungen von Zahnrädern möglich zahnräder: in einem Stück mit der Welle (Welle - Zahnrad) und getrennt von der Welle (montiertes Zahnrad). Die Qualität der Welle - die Zahnräder (Steifigkeit, Getriebegenauigkeit usw.) stellt sich als höher heraus, und die Herstellungskosten sind niedriger als bei der Welle mit dem montierten Zahnrad, so dass alle Zahnräder von Getrieben in der Regel in einem Stück mit der Welle zusammenarbeiten. In fig. Abb. 4.7 zeigt die charakteristischen Bauformen des Wellengetriebes.
In fig. 4,7 azahnradkonstruktion bietet Schneidzähne mit einem freien Abtriebszahnwerkzeug (Schneckenschneider oder Dolbyak). Bei großen Übersetzungsverhältnissen unterscheidet sich der Außendurchmesser des Zahnrads in der Regel nur geringfügig vom Wellendurchmesser und die Wellen - die Zahnräder sind in diesem Fall entsprechend der Form in Fig. 2 ausgelegt. 4,7 b.
Die Leistung des Schneckenschneiders wird grafisch durch seinen Außendurchmesser bestimmt Dф, die abhängig vom Getriebemodul und dem Genauigkeitsgrad des Getriebes gemäß den folgenden Empfehlungen zugewiesen wird:
| mmm | 2…2,25 | 2,5…2,75 | 3…3,75 | 4…4,5 | 5…5,5 | 6…7 | |
| Df, mm | 7 Grad Genauigkeit | ||||||
| 8 ... 10 Grad genau. |
Wenn möglich, ist es wünschenswert, die Konstruktion der Einsteckzahnräder zu vermeiden, da in diesem Fall die Arbeit des Schneckenfräsers oder der Schleifscheibe (beim Fertigbearbeiten der Zähne) behindert wird.
In fig. 4,7 in zeigt eine Ausführungsvariante des Kegelwellengetriebes.
5. KONSTRUKTION VON ELEMENTEN DES FALLS
REDUZIERER
Das Getriebegehäuse dient dazu, Teile des Getriebes zu lokalisieren und zu koordinieren, sie vor Verschmutzung zu schützen, das Schmiersystem zu organisieren und auch die Kräfte zu erfassen, die beim Eingriff des Zahnradpaares, der Lager und des offenen Zahnrads auftreten.
Bei den konstruierten einstufigen Getrieben wird generell die Konstruktion eines geteilten Gehäuses bestehend aus Deckel und Sockel akzeptiert (Abb. 5.1, 5.2). Vertikale Gehäuse zylindrische Getriebe kann (Abb. 5.1) in einigen Fällen zwei Verbinder haben, wodurch ein weiterer Körperteil bestimmt wird, der mittlere. Trotz der verschiedenen Körperformen haben sie die gleichen Strukturelemente, die Vorsprünge, Flansche und Kanten aufweisen, die durch Wände zu einem einzigen Ganzen verbunden sind, und ihre Gestaltung folgt einigen allgemeinen Regeln.
Die Form des Körpers wird hauptsächlich durch technologische, betriebliche und ästhetische Anforderungen bestimmt, wobei seine Festigkeit und Steifigkeit berücksichtigt wird. Diese Anforderungen werden von rechteckigen Körpern mit glatten Außenwänden ohne hervorstehende Konstruktionselemente erfüllt: Lageransätze und Kanten im Inneren; Kupplungsbolzen nur entlang der Längsseite des Gehäuses in den Nischen; Abdeckungen von Lagerknoten, hauptsächlich eingeschnitten; Standfüße stehen nicht für die Abmessungen des Rumpfes (siehe standardausführungen Reduzierungen im Atlas und).
Die vorgeschlagenen Rumpfformen sind nicht die einzigen. Bei Bedarf können Sie andere Designs erstellen.
Die Gesamtabmessungen (Außenabmessungen) der Karosserie werden durch die Abmessungen der Getriebe in der Karosserie und bestimmt kinematisches Schema Getriebe
 | Abb. 5.1 |
Gleichzeitig stehen die vertikalen Wände des Getriebes senkrecht zum Sockel, die obere Ebene des Gehäusedeckels steht parallel zum Sockel, der Getriebezug passt in das Quader (siehe Abb. 5.1). Die Auslegung von Zahnrädern, Wellen und Lagerbaugruppen, deren Abmessungen in der Entwurfskonstruktion vorgegeben sind (siehe Abb. 3.2), wird daher in Verbindung mit der Gehäusekonstruktion durchgeführt.
In leicht belasteten Getrieben ( T2 500 Nm) wird angenommen, dass die Dicke der Wände des Deckels und der Basis des Gehäuses gleich sind (Abb. 5.3). ![]() mm wo T2− Drehmoment am Rad der Welle mit niedriger Drehzahl, Nm.
mm wo T2− Drehmoment am Rad der Welle mit niedriger Drehzahl, Nm.
Die Innenkontur der Rumpfwände ist entlang des gesamten Rumpfumfangs umrissen, wobei die Lücken und berücksichtigt werden hMzwischen der Kontur und den rotierenden Teilen (vgl. Abb. 3.2).
Besonderes Augenmerk wird auf Flanschverbindungen gelegt, die die Belastung des Getriebes wahrnehmen.
Es gibt fünf Arten von Flanschen:
1 - die Fundamentbasis des Körpers (Abb. 5.4);
2 - tragende Nasen des Sockels und des Gehäusedeckels;
3 - Sockel und Gehäusedeckel verbinden;
4 - tragende Kappen;
5 - Inspektionslukenabdeckungen.
Die Strukturelemente des Flansches mit dem entsprechenden Index werden in Abhängigkeit vom Durchmesser ausgewählt d Befestigungsschraube aus Tabelle 5.1 oder durch Empfehlung bestimmt (Abb. 5.5):
für Schraubenbreite k 2.2d ; Lochachsenkoordinate Mit = k/ 2 ;
die Höhe der Auflagefläche unter dem Kopf ![]() mm;
mm;
für Bolzenbreite k 2,7d ;
lochachsenkoordinate Mit = k/ 2 - (1 ... 2) mm.
In der Tabelle der Durchmesserindex d Die Befestigungsschraube zeigt an, dass sie zum entsprechenden Flansch gehört (siehe Abb. 5.3 - 5.5).
Der Basisflansch des Gehäusesockels dient zur Montage des Getriebes am Grundrahmen (Platte). Die Flanschauflagefläche besteht aus zwei langen parallelen oder vier kleinen Platten (vgl. Abb. 5.3, 5.4). Befestigungspunkte sind so weit wie möglich (aber innerhalb des Gehäuses) voneinander entfernt. L1. Die Länge der Auflagefläche der Platte L = L1 + b1; Breite b1 = 2,4 ∙ d01 + 1,5; die Höhe h1= (2,3...2,4).
Konstruierte Getriebe werden mit vier Schrauben (Stehbolzen) in den Gehäusenischen am Rahmen (Platte) befestigt. Die Größen der Nischen sind in Abb. 1 angegeben. 5,5; Nischenhöhe h01= (2,0...2,5) ∙ d1 beim Befestigen mit Stiften, h01= 2,5 ∙ (d1+) verschraubt. Die Form der Nische (eckig oder seitlich) wird durch die Größe, Form des Körpers und die Lage der Befestigungspunkte bestimmt. Wenn möglich, wird der Körper mit Bolzen von unten an dem Rahmen (Platte) befestigt, wodurch der Bau einer Nische entfällt.
Der Flansch des Lagerdeckels des Deckels und der Boden des Gehäuses ist so gestaltet, dass er den Deckel und den Boden der geteilten Gehäuse verbindet. Der Flansch befindet sich am Montageort der kupplungsgelagerten Bolzen (Schrauben) (siehe Abb. 5.3); an den Längsseiten des Rumpfes; im Deckel von seiner Wand nach außen, an der Basis - von der Wand nach innen.
Die Anzahl der Lagerschrauben beträgt 2 für vertikale und 3 für horizontale.
Lagerklemmschrauben setzen sich im Abstand näher an die Lageröffnung L2 Freunde voneinander, so dass der Abstand zwischen den Wänden der Löcher einen Durchmesser aufweist d02i D t (beim Einbau der Endabdeckung der Lagerbaugruppe) betrug mindestens 3 ... 5 mm (siehe Abb. 5.3). Die Höhe des Flansches wird grafisch bestimmt, basierend auf den Bedingungen des Anbringens des Schraubenkopfes auf der flachen Lagerfläche des Lagerzapfens.
Bei einem zylindrischen horizontalen Getriebe (s. Abb. 5.3) befindet sich die Schraube zwischen den Bohrungen für die Lager, in der Mitte zwischen diesen Bohrungen. Während die äußeren Enden der Lageransätze zur Vereinfachung der Bearbeitung in derselben Ebene ausgeführt werden.
In abnehmbaren Fällen mit relativ kleinen Längsseiten (mit aw(de2) 160) hoher Flansch h2 das gleiche über die gesamte Länge durchführen (vgl. Abb. 5.3). An den kurzen Seiten des Deckels und der Unterseite des Gehäuses, die nicht durch Schrauben verbunden sind, befindet sich der Flansch innerhalb des Gehäuses und dessen Breite k3d von der Außenwand bestimmt; an den Längsseiten durch Schrauben verbunden dIn Fig. 3 befindet sich der Flansch: im Gehäusedeckel, von der Wand nach außen, am Boden nach innen.
Anzahl der Verbindungsschrauben n3 und der Abstand zwischen ihnen L3 wird aus strukturellen Gründen in Abhängigkeit von der Größe der Getriebelängsseite und der Anordnung der Kupplungsbolzen verwendet. Mit einer relativ geringen Länge kann die Längsseite mitgenommen werden d3= d2i h3= h2und setzen Sie eine oder zwei Schrauben ein (siehe Abb. 5.3). Mit langen Längsseiten nehmen h3 = 1,5 für Bolzen h3= 1,5 ∙ + d 3 für Schrauben und die Anzahl der Schrauben n3 und der Abstand zwischen ihnen L3d konstruktiv bestimmen.
Der Flansch für den Lagereinheitsdeckel, bei dem das Loch (Hohlraum) bei bleibenden oder lösbaren Lagernaben mit einer Endkappe verschlossen ist, wird entsprechend dem Durchmesser der Schrauben ausgewählt d4 (tab. 5.2).
Tabelle 5.2
Die Parameter des Montageflansches des Enddeckels der Lagereinheit werden durch die Tabelle bestimmt. 5.3 und 5.4.
Flansch für die Sichtfensterabdeckung (siehe Abb. 5.1, 5.2, 5.6), für die die Abmessungen der Seiten die Anzahl der Schrauben sind n3 und der Abstand zwischen ihnen LBüste konstruktiv abhängig von der Position des Fensters und der Größe der Abdeckung des Sichtfensters; Flanschhöhe h5 = 3 ... 5 mm.
Stützplatten (Flansche) dienen zur Befestigung von Ablassstopfen, Belüftungsöffnungen, Ölindikatoren an Deckel und Boden. Die Abmessungen der Seiten der Platte sollten den Wert von haben e = 3 ... 5 mm mehr als die Abmessungen der Auflageflächen der Anbauteile. Platic Höhe h= 0,5 d
(Abb. 5.5).
Lagernasen sind zur Aufnahme eines Satzes von Teilen der Lagerbaugruppe vorgesehen (vgl. Abb. 5.1, 5.3). Abhängig von der Konstruktion des Deckels und der Basis des Getriebegehäuses ist eine unterschiedliche Anordnung von Vorsprüngen von Lageranordnungen von Hochgeschwindigkeits- und Niedriggeschwindigkeitswellen möglich.
Tabelle 5.3
Strukturelemente der Flanschabdeckung und des Vorsprungs
Lageranordnung
Bei Getrieben mit vertikaler Ausführung (Abb. 5.1) befinden sich die Lagerbuchsen im Gehäuse, wenn der Stecker des Deckels und der Gehäuseboden entlang der Achse der Abtriebswelle geführt sind.
Wenn bei den horizontalen Getrieben (Abb. 5.2) der Verbinder der Karosserieteile entlang der Achsen der Wellen geführt wird, werden die Vorsprünge der Lageranordnungen in der Basis des Gehäuses innerhalb des Gehäuses und im Deckel - außerhalb angeordnet.
Innendurchmesser der Lagerhochgeschwindigkeitsnabe DBiene langsam DDie Welle ist gleich dem Innendurchmesser des Flansches für den Lagereinheitsdeckel (siehe Tabelle 5.4) und dem äußeren DB3 ( DT3) = DB ( DT) + 3,
wo - die Wandstärke des Gehäuses.
Die Länge des Lagernests l1 Bypass und l2tihkhodnogo-Wellen sind abhängig vom Satz der Lager und vom Lagertyp (siehe Tabelle 5.4). dabei werden die abmessungen von geräteteilen, innendichtungen und abdeckungen berücksichtigt.
Tabelle 5.4
Längenbestimmung l Lagergehäuse, mm
Anmerkungen: 1. h - die Höhe des Zentriergürtels des Abschlussdeckels oder die Höhe des Einsteckschlosses (siehe Tabelle K15).
2. B(T) - die Breite des Lagers.
3. H1– Höhe der Einstellschraube.
4. H - die Höhe des Hochdruckreinigers.
Inspektionsluke (Abb. 5.6). Sie dient zur Kontrolle der Montage und Prüfung des Getriebes während des Betriebs. Zur Erleichterung der Inspektion befindet es sich auf der oberen Abdeckung des Rumpfes, wodurch auch eine Ölfüllluke verwendet werden kann. Inspektionsluke bildet eine rechteckige oder (selten) kreisförmige Form der maximal möglichen Größe. Die Luke ist mit einem Deckel verschlossen. Weit verbreitete Stahlkappen aus Blechstärken k 2 mm (siehe Abb. 5.6, a). Um keinen Staub von der Innenseite des Gehäuses einzusaugen, legen Sie Dichtungen aus Pappe (1 ... 1,5 mm dick) oder Gummistreifen (2 ... 3 mm dick) unter die Abdeckung. Wird ein Stopfen mit einem solchen Deckel kombiniert, so wird er daran angeschweißt oder durch Bördeln befestigt (Abb. 5.6, b).
In fig. 5,6 in Die mit dem Filter und dem Auslass kombinierte Abdeckung wird angezeigt. Der innere Deckel ist beidseitig mit vulkanisiertem Gummi eingefasst. Die äußere Abdeckung ist flach, entlang ihrer langen Seite 2 - 3 werden Sicken extrudiert, durch die der innere Hohlraum des Getriebes mit der äußeren Umgebung verbunden ist. Der Raum zwischen den Abdeckungen ist mit einem Filter aus feinem Kupferdraht oder anderem Material gefüllt. Abdeckungen werden mit Schrauben mit einem halbrunden oder halben Kopf am Körper befestigt.
Wenn keine Inspektionsluke vorhanden ist oder sich in der Seitenwand des Gehäuses befindet, ist in der oberen Ebene des Gehäusedeckels ein Loch für die Entlüftung vorgesehen. Aus konstruktiven Gründen wird manchmal der Schmierpegel des Getriebes mit einer im Gehäusedeckel installierten Stabölanzeige überwacht, für die eine spezielle Öffnung vorgesehen ist. Diese Öffnungen können auch zum Einfüllen von Öl verwendet werden.
Installationsstifte (siehe Abb. 5.7). Die Bohrungen für Lager (Lagerbuchsen) im Deckel und die Unterseite der Karosserie entstehen in der Sammlung. Vor Bohrungen in dieser Verbindung werden zwei Verriegelungsstifte so weit wie möglich voneinander entfernt angeordnet, um die relative Position der Gehäusekappe und des Sockels für nachfolgende Anordnungen festzulegen. Die konischen Verriegelungsstifte sind schräg oder vertikal positioniert (siehe Abb. 5.7, a und b) abhängig von der Ausführung des Flansches. Wo es nicht möglich ist, konische Stifte zu verwenden, stoßen Stoßnähte an jeder Wand einen (nur 4) zylindrische Stifte an (siehe Abb. 5.7, in). Pin-Durchmesser d = (0,7…0,8) ∙ d3 wo d3– Durchmesser der Verbindungsschraube.
Schrauben auspressen. Die Dichtfläche der Anschlussebene verklebt die Abdeckung und die Basis des Gehäuses. Um deren Trennung zu gewährleisten, wird empfohlen, bei der Demontage Quetschschrauben zu verwenden, die an zwei gegenüberliegenden Stellen des Gehäusedeckels angebracht sind. Der Durchmesser der Quetschschrauben entspricht dem Durchmesser der Verbindung dLagerlager d2 Schrauben.
a b c
Augen(siehe Abb. 5.8).
Zum Anheben und Transportieren des Gehäusedeckels und des zusammengebauten Getriebes werden Augen verwendet, die zusammen mit dem Deckel gegossen werden. Mit der Option fig. 5,8 a Das Auge ist in Form einer Versteifung mit einem Loch gemäß Fig. 1 ausgebildet. 5,8 b - in Form einer Durchgangsbohrung im Gehäuse. Die Wahl der Gestaltung des Auges hängt von der Größe und Form des Gehäusedeckels ab.
Löcher für Ölanzeige und Ablassschraube (Abb. 5.9). Beide Löcher (Abb. 5.9, a) Es ist wünschenswert, sich an einer Seite der Basis des Körpers an zugänglichen Stellen nebeneinander zu befinden. Die Unterkante des Ablauflochs sollte sich auf oder unter der Höhe des Bodens befinden.
Der Boden ist wünschenswert, um mit einer Neigung von 1 ... 2 ° in Richtung der Bohrung zu arbeiten. Ganz am Loch des Gusses der Körperbasis wird eine lokale Vertiefung durchgeführt, um das Öl abzulassen und den Schmutz abzusetzen (Abb. 5.9). Das Ölindikatorloch sollte sich in einer Höhe befinden, die für eine genaue Messung des oberen und unteren Ölstands ausreicht. Die Form und Größe der Öffnungen hängt von der Art des gewählten Ölindikators ab ablassschraube (siehe Abb. 5.1, 5.2). Die Außenseiten der Löcher machen Stützplatten aus. Bei der Installation eines Ölanzeigers und eines Ablassstopfens mit zylindrischem Gewinde müssen Dichtungen aus Paronit oder einem Gummiring verwendet werden. Der Stopfen mit konischem Gewinde erfordert keine Verdichtung.

6. Entwicklung der Arbeitsdokumentation
Kursprojekt
Die Übertragung von Außenzahnrädern mit Stirnradzahnrädern (t 5 mm; zi 22; z2 50) sollte mit einem Achsabstand von 186 mm erfolgen.
Beim Verzahnungsgetriebe, das von Dolbyakami geschnitten wird, werden die Korrekturmöglichkeiten erheblich erweitert.
Für Außenzahnräder aus dieser Sicht beste ergebnisse werden durch Anlegen positiver Zahnräder aufgrund einer Erhöhung der Krümmungsradien der Seitenflächen erhalten.
Innenverzahnung zylindrisches Stirnrad. | Getriebe Nachfolgend wird die Übertragung von Außenverzahnungen als die häufigste angesehen.
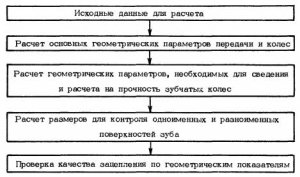
Für ein zylindrisches Außenverzahnungsgetriebe, das aus Rädern besteht, die mit einem Zahnstangenwerkzeug mit Standardparametern (ST SEV 308 - 76) geschnitten werden, müssen die wichtigsten geometrischen Parameter berechnet und die Konstruktionsergebnisse anhand von Qualitätsindikatoren überprüft werden.
Sperrkreise für Außenzahnräder Zahnräder aus in Dolbykami geschnittenen Rädern (Abb. 22 - 207), die für Räder mit einer Standardquellkontur (GOST 3058 - 54) ausgelegt sind und vom System berechnet werden, wobei das Standard-Radialspiel im Netz während einer Korrektur beibehalten wird. Entlang der gestrichelten Linien auf den Konturen und der D-Skala können die Verschiebungskoeffizienten auch für jeden Grad der Verschlechterung des Dolbyak leicht ausgewählt werden. Es wird angenommen, dass beide Räder des Paares vom gleichen Stampfer geschnitten werden.
Das Pluszeichen bezieht sich auf die Zahnräder der Außenverzahnung und das Minuszeichen bezieht sich auf die Innenverzahnung.
Die Toleranzen von Kegelrädern und Außenzahnrädern werden von GOST 9368 - 60 mit 1 mm t, einem Teilkreisdurchmesser von bis zu 320 mm für Räder mit geraden und schrägen Zähnen und 1758 - 56 GOST mit einem Durchmesser von 1 bis 30 mm und einem Raddurchmesser von bis zu 2000 eingestellt mm - für Räder mit geraden, schrägen und gekrümmten Zähnen.
Der große Vorteil von Innenverzahnungen gegenüber Außenverzahnungen ist ihre Kompaktheit.
Die Berechnungen entsprechen auch den Empfehlungen der CMEA-Normen für Außenzahnräder. GOST 21354 - 75 geregelte Berechnung zylindrische Zahnräder. Berechnete Abhängigkeiten für kegelradgetriebe mit den gleichen Empfehlungen erzielt, um einen einheitlichen Ansatz für die Berechnung von konischen und zylindrischen Zahnrädern zu gewährleisten.
Um zu vermeiden, dass die Zähne von Evolventen-Nullrädern für Zahnräder mit Außenzahnrädern mit 20 und / oder 1 0 geschnitten werden, sollte 2min 17 gewählt werden. wenn A 0 8, zmj, 14 (siehe Kap.
Um ein Hinterschneiden der Zähne von Evolventen-Nullrädern für Zahnräder mit Außenzahnrädern mit 20 und h10 zu vermeiden, sollte Zmin 17 gewählt werden; wenn / i 0 8 bzw. zm - n 4 ist (siehe Kap.
Entsprechend der relativen Lage der Oberflächen der Oberseiten und Täler der Räder gibt es Außenverzahnungen, bei denen beide Zahnräder Außenzähne haben, und Innenverzahnungen, bei denen eines der Räder Außenzähne und das zweite Innenrad aufweist.
Der Dolbyak und das abgeschnittene Zahnrad (Rad mit Außenverzahnung) stellen die Übertragung der Außenverzahnung dar, daher bleibt alles, was zuvor über die Kopplung des Dolbyak mit dem Stirnrad gesagt wurde, in Kraft.
Die Differenz der Verschiebungskoeffizienten für Innenverzahnungen hat den gleichen Effekt wie die Summe der Verschiebungskoeffizienten für Außenzahnräder.
Zylindrisch zahnradpaare Interne Zahnräder werden verwendet, um die Drehung zwischen parallelen Achsen zu übertragen, und im Gegensatz zu äußeren Zahnrädern drehen sich beide Räder in dieselbe Richtung.
Die Berechnung der Werte von Wj und Znj erfolgt gemäß den Schemata der in Fig. 1 angegebenen Algorithmen. 2.7 und für Außenzahnräder sind auch die Zahnräder der Außenzahnräder in Abb. 2 dargestellt. 2,7 6 für die Räder, die ein Innenverzahnungspaar bilden.
Die Berechnung der Werte von Wj und Znj erfolgt gemäß den Schemata der in Fig. 1 angegebenen Algorithmen. 2.7 und für Außenzahnräder sind auch die Zahnräder der Außenzahnräder in Abb. 2 dargestellt. 2.7, b für die Räder, die ein Paar Innenverzahnung bilden.
Die oberen Zeichen stehen für Zahnräder mit Innenverzahnung, bei denen sich die Köpfe der Zähne innerhalb der Anfangskreise befinden und die Beine sich außerhalb dieser Kreise befinden (siehe Fig. 32a); niedriger - für Getriebe mit Außenverzahnung.
Die Formeln zur Berechnung der geometrischen Parameter der Verzahnung der Innenverzahnung mit den Rädern, die mit einem nicht modifizierten Bit geschnitten sind, sind in der Tabelle angegeben. 7.10 (modifizierte Dolbyka siehe GOST 19274 - 73), Außenzahnräder siehe 1 h, Kap.
Es gibt Übertragungen von Außen- und Innenverzahnungen. Zu den Außenzahnrädern gehören: zylindrische Evolventenzahnräder mit linearer Berührung - Stirnrad, Stirnrad, Chevron-Zahnräder; Punkt-zu-Punkt-Stirnradzahnräder (M. L. Novikov-Systeme); Kegelräder mit linearer Berührung - Stirnrad und Stirnrad mit gepunkteter Berührung - mit kreisförmige Zähne; Hyperbolische Zahnräder mit Punktberührung - schraubenförmige und hypoide Räder und Zahnräder mit linearer Berührung - schneckengetriebe mit einer zylindrischen und globoiden Schnecke.
Schema zum Beweis des Hauptverbindungssatzes. Abhängig von der relativen Position der Räder können die gezahnten Vorderräder außen (siehe Abb. 8.1) und innenliegende (Abb. 8.5) Kupplung sein. Nachfolgend finden Sie die Übertragung der externen Verzahnung (als die häufigste).
Zahnstangengetriebe. | Innenzahnrad zylindrisches Stirnrad.
Abhängig von der relativen Position der Räder befinden sich die Zahnräder außen (siehe Abb. 8.1) und innen (Abb. 8.5). Nachfolgend wird die Übertragung von Außenverzahnungen als die häufigste angesehen.
Außen- und Innenverzahnung eines zylindrischen Paars. In der Innenverzahnung ist das Außenzahnrad, das im Inneren des Rades mit Innenverzahnung eingebaut ist, das führende Element, wodurch der Achsabstand im Vergleich zu der Außenzahnradübertragung erheblich verringert wird und das Getriebe kompakter ist. Die axiale Übertragungsdistanz des Außenzahnrads ist ungefähr 2- bis 4-mal länger als die des Innenzahnrads. Darüber hinaus passt das konkave Profil der Zähne des Innenverzahnungsrades zu dem konvexen Profil der Verzahnung des Außengetriebes, was zu einer längeren Lebensdauer und Übertragungsfestigkeit des Innengetriebes führt als die des Außengetriebes.
Das Pluszeichen wird für Außenzahnräder akzeptiert, Minuszeichen für Innenzahnräder. Ferner werden nur Außenzahnräder berücksichtigt.
Das Pluszeichen wird für Außenzahnräder akzeptiert, das Minuszeichen für Innenzahnräder. Ferner werden nur Außenzahnräder berücksichtigt.
Das Schema zum Messen der Länge der gemeinsamen Normalen der Zähne von Zylinderrädern. Bei Zahnrädern, die mit einem Werkzeug mit einer modifizierten ursprünglichen Kontur geschnitten werden, sollte keine konstante Sehne auf dem modifizierten Zahnsegment liegen. Die entsprechende Prüfung wird gemäß den Formeln von GOST 16532 - 70 für Außenzahnräder und von GOST 19274 - 73 für Innenzahnräder durchgeführt.
Neben den staatlichen Standards in der Industrie gibt es andere regulatorische und technische Dokumente, die die Spezifität der Industrie an den technischen Anforderungen für Produkte der allgemeinen technischen Anwendung widerspiegeln. Daher sind die von Miktyazhmash entwickelten führenden technischen Materialien für zylindrische Evolvent-Außenzahnräder und Novikov-Zahnräder von großer Bedeutung. Industriestandards für Zahnräder, die von NIItraktorselselkhozmash erstellt wurden; Alben mit Arbeitszeichnungen für Zylinder- und Kegelradgetriebe, ausgestellt vom Ministerium für Maschinenbau für die Licht-, Lebensmittel- und Haushaltsgeräteindustrie.
Das Vorzeichen des Übersetzungsverhältnisses wird durch einen Multiplikator (-1) bestimmt, wobei t die Anzahl der äußeren Gänge ist. Der Wert von n in solchen Zahnrädern ist jedoch relativ klein, da er durch den zulässigen Wert von r und r begrenzt ist und die Anzahl der Zähne der Zwischenräder (2 und 3 in Fig. 15.2), die gleichzeitig mit den vorhergehenden und den nachfolgenden Rädern in Eingriff stehen, die Gesamtgröße nicht beeinflusst Getriebemechanismus.
Das Vorzeichen des Übersetzungsverhältnisses wird durch einen Multiplikator (-1) bestimmt, wobei / die Anzahl der äußeren Gänge ist. Der Wert von m in solchen Zahnrädern ist jedoch relativ klein, da er durch den zulässigen Wert von r und r begrenzt ist und die Anzahl der Zähne der Zwischenräder (2 und 3 in Fig. 15.2), die gleichzeitig mit den vorhergehenden und nachfolgenden Rädern in Eingriff stehen, keinen Einfluss auf den Wert hat Gesamtübersetzungsverhältnis.
Das Vorzeichen des Übersetzungsverhältnisses wird durch den Faktor (-) p bestimmt, wobei p die Anzahl der äußeren Gänge ist.
Abhängig von der relativen Position der Zahnräder werden Zahnräder mit Außen- (a, b, c) und Innen- (d) Getriebe unterschieden. Im ersten Fall drehen sich die Übertragungsräder gegensinnig, im zweiten - die Drehrichtungen der Räder fallen zusammen. Die häufigste Übertragung von Außenverzahnungen.
In diesem Zusammenhang ist es notwendig, die Qualität der Verzahnung anhand geometrischer Parameter zu überprüfen. Wenn die Wahl von r und x in Verbindung mit den Angaben in § 2.3 erfolgt, ist diese Prüfung für Außenzahnräder nicht erforderlich.
Außen- und Innenverzahnung eines zylindrischen Paars. In der Innenverzahnung ist das Außenzahnrad, das im Inneren des Rades mit Innenverzahnung eingebaut ist, das führende Element, wodurch der Achsabstand im Vergleich zu der Außenzahnradübertragung erheblich verringert wird und das Getriebe kompakter ist. Die axiale Übertragungsdistanz des Außenzahnrads ist ungefähr 2- bis 4-mal länger als die des Innenzahnrads. Darüber hinaus passt das konkave Profil der Zähne des Innenverzahnungsrades zu dem konvexen Profil der Verzahnung des Außengetriebes, was zu einer längeren Lebensdauer und Übertragungsfestigkeit des Innengetriebes führt als die des Außengetriebes.
Die Getriebeübersetzung ist im Gegensatz zur Getriebeübersetzung immer positiv und kann nicht unter eins liegen. Die Getriebeübersetzung charakterisiert die Übertragung nur quantitativ. Übersetzungsverhältnis und Übersetzungsverhältnis kann nur mit der Übertragung des Innengetriebes übereinstimmen. In äußeren Gängen stimmen sie nicht überein, da sie unterschiedliche Vorzeichen haben: Die Getriebeübersetzung ist negativ und Übersetzungsverhältnis - positiv
Wie sie sagen, zusammenpassende Zahnräder. Was ist die Übertragung der Innenverzahnung, wie unterscheidet sie sich von der Übertragung der Außenverzahnung? Was sind die Hauptfaktoren, die den vorherrschenden Einsatz von Zahnrädern in Getrieben von Baumaschinen vorgeben?
INDUSTRIE-STANDARD
2. Begriffe und Notationen, die im Standard verwendet werden - gemäß GOST 16530-83 und GOST 16531-83.
3. Das Schema zur Berechnung der Geometrie ist in Abb. 3 dargestellt. 1
4. Die Berechnung gemäß den Formeln sollte mit dem Messfehler erfolgen:
Tabelle 1
|
Parametername |
Bezeichnung |
|
Anzahl der Zähne: |
|
|
................................................ |
|
|
................................................ |
|
|
Quellkontur oder Quellkontur: |
|
|
profilwinkel ................................................ .................................. |
|
|
kopfhöhenverhältnis ............................................... ............ |
|
|
radialspielverhältnis ............................................... ....... |
|
|
krümmungskoeffizient der Übergangskurve ............................. |
|
|
Zentrumsabstand |
|
|
Offset-Koeffizient: |
|
|
................................................. |
|
|
räder …………………………………………………………………………. |
|
|
.................................................... |
|
|
................................................. |
|
|
................. |
|
|
.................................................... |
6. Die geometrischen Parameter der Zahnräder und Räder sind in Abb. 1 dargestellt. 2 und 3.

|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Getriebewinkel |
? w |
|
|
Offset Differenzverhältnis |
|
|
|
Offset-Koeffizient bei gegebenem Achsabstand ein w: |
Mit der Originalschaltung gemäß GOST 13755-81 Ausfallwerten x d in Komponenten x 1 und x 2 empfohlen für Blockiersysteme |
|
|
getriebe ................................... |
||
|
räder ....................................... |
||
|
Offset Differenzverhältnis |
x d = x 2 - x 1 |
|
|
Getriebewinkel |
? w |
|
|
Achsabstand für gegeben x 1 und x 2 |
a w |
|
|
Übersetzungsverhältnis |
||
|
Pitchdurchmesser |
d = mz |
|
|
Anfangsdurchmesser: |
||
|
getriebe ................................... |
||
|
räder ....................................... |
d w 2 = ud w 1 |
|
|
Der Durchmesser der Hohlräume: |
||
|
getriebe ................................... |
d f 1 = d 1 - 2m(h * a + c * - x 1) |
|
|
räder ....................................... |
d f 2 = d 2 + 2m(h * a + c * + x 2) |
|
|
Der Durchmesser der Zahnspitzen: |
||
|
getriebe ................................... |
d a 1 = d f 2 - 2ein w - 2mc * |
|
|
räder ....................................... |
d a 2 = 2a w + d f 1 + 2mc * |
|
|
Die Umfangsdicke des Zahns am Teilkreisdurchmesser: |
||
|
getriebe ................................... |
S 1 = m(0,5? + 2x 1 tg?) |
|
|
räder ....................................... |
S 2 = m(0,5? - 2x 2 tg?) |
Anmerkungen: 1. Es ist erlaubt, die Werte der Durchmesser der Zahnspitzen zu ändern und sie unter Verwendung anderer Formeln zu berechnen, um die erforderliche Qualität des Netzes gemäß den geometrischen Parametern zu erhalten.
2. Die Berechnung der Durchmesser der Oberseiten der Zahnräder während der Endbearbeitung innere Zähne Dolbyak für Zerspanungsarbeiten in der Anlage 1.
8. Formeln zur Berechnung der geometrischen Parameter, die für die Information und Berechnung der Stärke der Zahnräder benötigt werden, sind in der Tabelle angegeben. 3
Tabelle 3
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Hauptdurchmesser |
d b = dcos? |
|
|
Der Winkel des Profils an der Spitze des Zahns |
? a |
|
|
Der Krümmungsradius des Profils an der Spitze des Zahns |
? a = 0,5d b tg? a |
|
|
Der Krümmungsradius des aktiven Zahnprofils unten: |
||
|
? p 1 =? a 2 - a w sin? w |
||
|
? p 2 =? a 1 + a w sin? w |
||
|
Der Durchmesser des Kreises vom Beginn des aktiven Profils unten |
||
|
Der Krümmungsradius des Profils zu Beginn der Modifikation des Zahnkopfes: |
||
|
|
||
|
|
||
|
Der Durchmesser der Modifikation der Zahnköpfe |
||
|
Profilwinkel am Startpunkt der Kopfmodifikation |
||
|
Profilwinkel in der Mitte des aktiven Teils des Zahns |
||
|
Winkel der Modifikation des Zahnkopfes |
|
|
|
Der Durchmesser des Hauptumfangs des in Evolvente modifizierten Abschnitts des Zahnprofils |
d b m = dcos? m |
|
|
Hälfte der Winkeldicke des Zahns am Hauptumfang: |
||
|
getriebe ..................................... |
||
|
räder ......................................... |
||
|
Die Dicke des Zahns in einem Bogen auf einem Kreis d y: |
||
|
getriebe ..................................... |
|
|
|
räder ......................................... |
|
Hinweis Bei Vorhandensein stumpfen die Längskante des Zahnradius ab ? zu Ecke ? zu sollte durch die Formel bestimmt werden
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Die Länge des normalen normalen Zahnrads |
Die Bedingung sollte sein: 2? a 1 > w 1 > 2? p 1 , 2? g 1 > w 1 > 2? p 1. |
|
|
Wenn die Bedingungen nicht erfüllt sind, dann w neu berechnen durch abnehmen z w um 1 mit 2 ? a 1 ? w 1 (2? g ? w) oder zu erhöhen z w 1 gegen 1 wann w 1 ? 2? p 1 |
||
|
Der Winkel des Zahnprofils auf einem Kreis, der durch die Mitte des Rollenrades (Kugelrad) verläuft |
Die Bedingung sollte sein:
und wenn es eine Änderung des Profils des Zahnkopfes gibt - die Bedingung:
|
|
|
Der Durchmesser des konzentrischen Kreises eines Zahnrads, das durch die Mitte des Rollenrades (Kugelrad) verläuft |
||
|
Die Größe der Rollen (Kugeln): mit einer geraden Anzahl von Zähnen mit ungerader Zähnezahl |
m 2 = d 2 - D
Bedingungen müssen erfüllt sein m 2 < d d 2 d d 2 + D < d f 2 |
|
|
Vernetzung der Tonhöhe |
p? =? mcos? |
|
|
(kleinste) |
|
10. Die Formeln zur Berechnung der Länge der Eingriffslinie und zur Interpretation von Diagrammen für Gang (Fig. 4) und Räder (Fig. 5) sind in der Tabelle angegeben. 5


Tabelle 5
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Die Länge der aktiven Eingriffslinie (gemäß dem Evolventenmuster): |
||
|
getriebe ................................... |
g? 1 =? a 1 -? g 1 |
|
|
räder ....................................... |
g? 2 =? g 2 -? a 2 |
|
|
Die Länge der Modifikation des Zahnkopfes durch Evolventenmuster: |
||
|
getriebe ................................... |
l g 1 =? a 1 -? g 1 , |
|
|
räder ....................................... |
l g 2 =? a 2 -? g 2 , |
|
|
Durchmesser der Modifikation der Zahnköpfe |
11. Formeln zur Überprüfung der Qualität der Verzahnung anhand geometrischer Parameter sind in der Tabelle angegeben. 6
Tabelle 6
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Übersetzungsverhältnis |
Die Bedingung sollte sein: x 1 > x 1min |
|
|
Die Dicke des Zahns auf der Oberfläche der Gipfel: |
||
|
getriebe ................................... |
S a 1 = da 1 (? b 1 - inv? a 1) |
|
|
räder ....................................... |
S a 2 = da 2 (? b 2 + inv? a 2) S a ? 0,3m - ohne chemische Wärmebehandlung S a ? 0,4m - mit chemischer Wärmebehandlung |
|
|
Der Krümmungsradius am Grenzpunkt des Zahnprofils: |
||
|
getriebe ................................... |
|
|
|
räder ....................................... |
Folgende Bedingungen müssen erfüllt sein: ? L 1 ? ? p 1 ; ? L 2 ? ? p 2. Wenn Zähne geschnitten werden ? L 1 < 0 |
|
|
Parameter, die das Fehlen von Interferenzen bestimmen |
Folgende Bedingungen müssen erfüllt sein: ? ? 0; ? L 1 ? ? p 1 ; ? L 2 ? ? p 2 |
Anmerkungen: 1. Wenn der Überlappungskoeffizient unter Berücksichtigung der Abstumpfung der Längskanten der Zähne berechnet werden muss, werden die Werte durch die berechneten Formeln ersetzt ? a Werte ? zu.
2. Bei der verfeinerten Berechnung der Krümmungsradien an den Grenzpunkten sollten der Typ der Übergangsfläche und die Parameter der erzeugenden Flächen berücksichtigt werden.
12. Ein Beispiel für die Berechnung geometrischer Parameter ist in Anhang 2 angegeben.
ANHANG 1
Hilfe
BERECHNUNG ZUSÄTZLICHER GEOMETRISCHER PARAMETER
1. Anfangsparameter des Instruments rack-Typ sind in der Tabelle angegeben. 1
Tabelle 1
2. Die Anfangsparameter des Verzahnungsdolbyak sind in der Tabelle angegeben. 2
Tabelle 2
3. Die Formeln zur Berechnung des Raddurchmessers, die schließlich vom Zahnradstößel bearbeitet werden, sind in der Tabelle angegeben. 3
Tabelle 3
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Maschinenwinkel mit einem Dolbyak |
|
|
|
Achsabstand im Maschinengetriebe |
|
|
|
Der Durchmesser der Spitzen der Zähne des Rades |
d a 2 = d 2 - 2(h * a - x 2 - zu 2)m 1 , wo zu 2 = c* (1 - 0,5x 2) bei x 2 < 2 для ? = 20 ° bei x 2? 1 für ? ? 25 ° |
|
|
Durchmesser der Radmulden |
d f 2 = 2ein w 02 + d a 0 |
4. Die Formeln zur Berechnung der Koordinaten der Evolventpunkte sind in der Tabelle angegeben. 4
Tabelle 4
Hinweis Zur Bestimmung der verwendeten Koordinaten des rechteckigen Koordinatensystems X0Y auf der Getriebeachse und Achse zentriert Y, die mit der Symmetrieachse des Zahns zusammenfällt.
5. Formeln zur Berechnung der Parameter der Übergangskurve am Ritzel des Zahnrads, angegeben in Abb. 1 und 2 sind in der Tabelle angegeben. 5
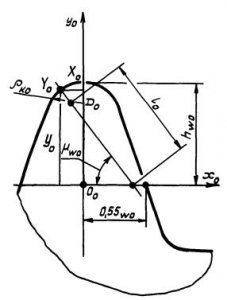

Tabelle 5
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
? w 0 |
90 °? ? w 0 ? ? 0 |
|
|
Produktionsschleifenmodul |
||
|
Der anfängliche Durchmesser des Zahnrads im Maschinenzahnrad |
d w 01 = m 0 z 1 |
|
|
Anfangszahnstärke im Maschinengetriebe |
S w 01 = d w 01 (? b 1 - inv? 0) |
|
|
Die anfängliche Dicke des Zahnwerkzeugs |
S w 0 =? m - S w 01 |
|
|
Die Höhe des ursprünglichen Werkzeugkopfes |
|
|
|
Die Koordinaten der Mittelkante des Werkzeugs |
|
|
|
y D 0 = h w 0 - ? zu 0 |
||
|
Die Koordinaten des Kontaktpunkts der Werkzeugkante |
x 0 = x D 0 + ? zu 0 cos? w 0 |
|
|
y 0 = y D 0 - ? zu 0 sünde? w 0 |
||
|
Abstand von der Mitte der Werkzeugverzahnung zum Pol des Maschinenzahnrads |
||
|
Profilwinkel an einem Punkt auf dem Umfang eines gegebenen Durchmessers d y |
? y |
bei ? w 0 = 90 ° ? y = 90 ° |
|
bei |
bei ? w 0 = 90 ° dy = dw 01 - 2y D 0 - 2? zu 0 |
|
|
Polar Winkelpunkt bei |
||
|
Krümmungsradius der Übergangskurve |
? f |
|
|
x = 0,5sünde(? b 1 -? y) |
||
|
y = 0,5d y cos(? b 1 -? y) |
6. Formeln zur Berechnung der Parameter der Übergangskurve an der Wurzel des Rades, wie in Abb. 1 dargestellt. 3 und 4 sind in der Tabelle angegeben. 6

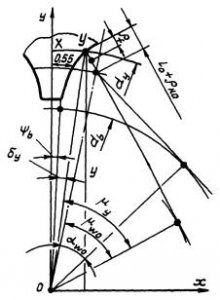
Tabelle 6
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Der aktuelle Winkel des Maschinenzahnrads |
? w 0 |
? w 02 ? ? w 0? 90 ° |
|
Der Durchmesser des Kreises, der durch das Zentrum der Abrundung der Kante des Zahndolbyaks verläuft |
d d 0 = da 0 - 2? zu 0 |
|
|
Der Winkel des Evolventenprofils an einem Punkt auf dem Kreis, der durch das Zentrum der Abrundung der Dolbyakkante verläuft |
|
|
|
Winkelkoordinate des Rundungszentrums |
|
|
|
Der Anfangsdurchmesser des Dolbyak im Maschinengetriebe |
|
|
|
Der Winkel des Evolventenprofils an einem Punkt auf dem Kreis d y 0 |
bei ? w 0 = 90 ° ? y 0 = 90 °. |
|
|
|
||
|
Der Abstand von der Mitte der Abrundung der Schneide bis zur Stange des Maschinengetriebes |
bei ? w 0 = 90 ° l 0 = 0,5(d d 0 - d w 0) |
|
|
Profilwinkel an Punkt am Durchmesserumfang d y |
bei ? w 0 = 90 ° ? y = 90 ° |
|
|
Der Durchmesser des durch den Punkt verlaufenden Kreises bei |
bei ? w 0 = 90 ° dy = df = 2ein w 0 + d a 0 |
|
|
Winkelkoordinate eines Punktes y |
Mit ? w 0 = 90 °.
|
|
|
Krümmungsradius der Übergangskurve |
|
|
|
Übergangspunktkoordinaten |
x = 0,5d ysünde ( ? y + ? b 2) y = 0,5d ycos ( ? y + ? b 2) |
7. Formeln zur Berechnung der Durchmesser der Grenzpunkte der Eingriffszonen sind in der Tabelle angegeben. 7
Tabelle 7
|
Parametername |
Bezeichnung |
Berechnungsformel |
|
Der Krümmungsradius des Zahnprofils am oberen Grenzpunkt des Einpaareingriffs: |
||
|
getriebe .................................... |
? u 1 =? p 1 + p? |
|
|
räder ........................................ |
? u 2 =? p 2 - p? |
|
|
Der Winkel des Zahnprofils im oberen Grenzpunkt des Einpaar-Eingriffs |
||
|
Der Durchmesser des Kreises der oberen Grenzpunkte einer Einpaarverbindung |
||
|
Der Krümmungsradius des Zahnprofils am unteren Grenzpunkt des Einpaareingriffs: |
||
|
getriebe .................................... |
? v 1 =? zu 1 - p? |
|
|
räder ........................................ |
? v 2 =? zu 2 + p? |
|
|
Der Winkel des Zahnprofils am unteren Grenzpunkt des Ein-Paar-Eingriffs |
||
|
Der Durchmesser des Kreises der unteren Grenzpunkte einer Einpaarverbindung |
8. Formeln zur Berechnung der kinematischen Parameter sind in der Tabelle angegeben. 8
Tabelle 8
ANHANG 2
Hilfe
BEISPIEL DER BERECHNUNG GEOMETRISCHER PARAMETER
1. Die Anfangsdaten für die Berechnung sind in der Tabelle angegeben. 1
Tabelle 1
|
Parametername |
Bezeichnung |
Nenngröße |
|
Anzahl der Zähne: |
||
|
getriebe ................................................. ..................... |
||
|
Modul, mm |
||
|
Quellkontur: |
||
|
profilwinkel, Hagel .............................................. ........... |
||
|
kopfhöhenverhältnis ......................................... |
h * a |
|
|
radialspielverhältnis ..................................... |
||
|
krümmungskoeffizient der Übergangskurve |
?* f |
|
|
Achsabstand, mm |
||
|
Offset-Koeffizient: |
||
|
getriebe ................................................. ..................... |
||
|
räder ................................................. ......................... |
||
|
Der Koeffizient der Modifikation des Profils des Zahnkopfes: |
||
|
getriebe ................................................. ..................... |
||
|
räder ................................................. ......................... |
||
|
Der Höhenkoeffizient der Modifikation des Profils des Zahnkopfes: |
||
|
getriebe ................................................. ..................... |
||
|
räder ................................................. ......................... |
2. Die durch die Formeln berechneten Nennmaße der geometrischen Hauptparameter sind in der Tabelle angegeben. 2
Tabelle 2
|
Parametername |
Berechnungsformel |
Nenngröße |
|
Angreifer, Hagel |
|
|
|
Offset Differenzverhältnis |
|
|
|
Offset-Koeffizient: |
||
|
am Gang .................................... |
Bedeutung x 1 auf der Verriegelungskontur aufgenommen |
|
|
am Steuer ........................................ |
x 2 = x d + x 1 |
|
|
Übersetzungsverhältnis |
||
|
Pitchdurchmesser, mm: |
||
|
getriebe ...................................... |
d 1 = mz 1 |
|
|
räder .......................................... |
d 2 = mz 2 |
|
|
Ausgangsdurchmesser, mm: |
||
|
getriebe ...................................... |
||
|
räder .......................................... |
d w 2 = ud w 1 |
|
|
Durchmesser der Mulden, mm: |
||
|
getriebe ...................................... |
d f 1 = d 1 - 2m(h * a + c * - x 1) |
|
|
räder .......................................... |
d f 2 = d 2 + 2m(h * a + c * + x 2) |
|
|
Der Durchmesser der Zahnspitzen, mm: |
||
|
getriebe ...................................... |
d a 1 = d f 2 - 2ein w - 2c *m |
|
|
räder .......................................... |
d a 2 = 2ein w + d f 1 + 2c *m |
|
|
Zahnstärke, mm: |
||
|
getriebe ...................................... |
S 1 = m(0,5? + 2x 1 tg?) |
|
|
räder .......................................... |
S 2 = m(0,5? - 2x 2 tg?) |
3. Die Nennmaße der geometrischen Parameter, die für die Information und Berechnung der Stärke der Zahnräder benötigt werden, sind in der Tabelle angegeben. 3
Tabelle 3
|
Parametername |
Berechnungsformel |
Nenngröße |
|
Hauptdurchmesser, mm: |
||
|
getriebe ....................................... |
d b 1 = d 1 cos? |
|
|
räder ........................................... |
d b 2 = d 2 cos? |
|
|
Der Winkel des Profils an der Spitze des Zahns, Hagel: |
||
|
getriebe ....................................... |
||
|
räder ........................................... |
||
|
Der Krümmungsradius des Profils an der Spitze des Zahns, mm: |
||
|
getriebe ....................................... |
? a 1 = 0,5 d b 1 tg? a 1 |
|
|
räder ........................................... |
? a 2 = 0,5 d b 2 tg? a 2 |
|
|
Der Krümmungsradius des aktiven Zahnprofils am unteren Punkt, mm: |
||
|
getriebe ....................................... |
? p 1 = ? a 2 - a w sin? w |
|
|
räder ........................................... |
? p 2 = ? a 1 + a w sin? w |
|
|
Der Durchmesser des Kreises vom Anfang des aktiven Profils am unteren Punkt, mm: |
||
|
getriebe ....................................... |
|
|
|
räder ........................................... |
|
|
|
Der Krümmungsradius des Profils zu Beginn der Modifikation des Zahnkopfes, mm: |
||
|
getriebe ....................................... |
|
|
|
räder ........................................... |
|
|
|
getriebe ....................................... |
|
|
|
räder ........................................... |
|
|
|
Profilwinkel am Startpunkt der Modifikation des Radkopfes, Grad: |
||
|
getriebe ....................................... |
||
|
räder ........................................... |
||
|
Profilwinkel in der Mitte des aktiven Teils des Zahns, Grad: |
||
|
getriebe ....................................... |
|
|
|
räder ........................................... |
|
|
|
Winkelprofil der Modifikation des Zahnkopfes, Hagel |
|
|
|
Der Durchmesser des Hauptumfangs des evolventenmodifizierten Abschnitts des Zahnprofils in mm: |
||
|
getriebe ....................................... |
d b m 1 = d 1 cos? m 1 |
|
|
räder ........................................... |
d b m 2 = d 2 cos? m 2 |
|
|
Hälfte des Winkels des Zahns am Hauptumfang, froh: |
||
|
getriebe ....................................... |
||
|
räder ........................................... |
4. Die Nennmaße für die Steuerung sind in der Tabelle angegeben. 4
Tabelle 4
|
Parametername |
Berechnungsformel |
Nenngröße |
|
Die Länge des gewöhnlichen normalen Zahnrads, mm |
|
|
|
Profilwinkel auf einem Kreis, der durch die Rollenmitte verläuft, Hagel |
Mit D 2 = 4,773 mm
|
|
|
Die Größe der Rollen (Kugeln) am Rad, mm |
|
|
|
Getriebeteilung, mm |
p? =? mcos? |
|
|
Der Krümmungsradius der Übergangskurve (kleinste), mm |
|
|
|
|
5. Die Nennmaße der Länge der Eingriffslinie und der Durchmesser der Modifikation der Zahnköpfe sind in der Tabelle angegeben. 5
Tabelle 5
|
Parametername |
Berechnungsformel |
Nenngröße |
|
Die Länge der aktiven Eingriffslinie (nach dem Evolventenmuster), mm: |
||
|
getriebe ...................................... |
g? 1 =? a 1 -? p 1 |
|
|
räder .......................................... |
g? 2 =? p 2 -? a 2 |
|
|
Der Krümmungsradius des Zahnprofils zu Beginn der Modifikation des Zahnkopfes, mm: |
Mit l g 1 = 2,5 mm und l g 2 = 2,5 mm (aus Evolventenmuster) |
|
|
getriebe ...................................... |
? g 1 =? a 1 - l g 1 |
|
|
räder .......................................... |
? g 2 =? a 2 + l g 2 |
|
|
Durchmesser der Zahnkopfänderung, mm: |
||
|
getriebe ...................................... |
|
|
|
räder .......................................... |
|
6. Die Nennmaße zur Überprüfung der Qualität des Getriebes anhand geometrischer Parameter sind in der Tabelle angegeben. 6
Tabelle 6
|
Parametername |
Berechnungsformel |
Nenngröße |
|
Das Verhältnis des kleinsten Hubraums |
Die Bedingung sollte sein: x 1 > x 1 min |
|
|
Die Dicke des Zahns auf der Oberfläche der Zahnspitzen, mm: |
||
|
getriebe ...................................... |
S a 1 = (? b 1 - inv? a 1 ) d a 1 |
|
|
räder .......................................... |
S a 2 = (? b 2 + inv? a 2 ) d a 2 |
|
|
Überlappungsfaktor (geometrisch) |
||
|
Der Krümmungsradius am Grenzpunkt des Zahnprofils des Rades, mm: |
||
|
getriebe ...................................... |
|
|
|
räder .......................................... |
|
|
|
Der Parameter, der die Interferenz feststellt |
|
7. Die Anfangsparameter des Schneckenfräsers rechts m3 - 112ÀÀ-1 GOST 9324-79 sind in der Tabelle angegeben. 7
Tabelle 7
8. Die Anfangsparameter eines Dolbyak-Bechersporns mit Verzahnungsausschnitt m3 - 50A-Sh GOST 9323-79 sind in der Tabelle angegeben. 8
Tabelle 8
9. Die Nenngrößen der Raddurchmesser, die schließlich vom Verzahnungsdolbyak bearbeitet werden, sind in der Tabelle angegeben. 9
Tabelle 9
|
Parametername |
Berechnungsformel |
Nenngröße |
|
Der Verschiebungskoeffizient bei Dolbyak |
||
|
Der Winkel des Maschinenzahnrades mit einem Dolbyak, Hagel |
|
|
|
Achsabstand im Eingriffsrad der Maschine, mm |
|
|
|
Hilfswert |