Waren Beschreibung
Hebelmechanismen, Teil 6 Hebel und Kipphebel
Bei Kurbeltrieben werden als Abtriebs- oder Zwischenlenker Hebel, Kipphebel oder Backstage verwendet, die im Gegensatz zu einem sich fortschreitend bewegenden Schieber eine Wippbewegung relativ zu der sie mit dem Rahmen verbindenden Achse ausführen. Bei gleicher Bewegungsart können Hebel, Kipphebel und Hinterbühne jedoch völlig unterschiedlich gestaltet sein, was in erster Linie vom Zweck und Umfang bzw. dem Bereich der Technik, in dem der Hebel- oder Kurbeltrieb eingesetzt wird, abhängt diese Verknüpfungen.
Hebelarm- Dies ist ein Glied des Hebelmechanismus, das schwenkbar auf einer festen Achse montiert ist und relativ zu dieser eine Schaukelbewegung ausführt, während es einen Antrieb meistens von einer Pleuelstange oder Stange erhält, mit der es auch schwenkbar verbunden ist.
Rocker- Dies ist ein einarmiger Hebel, der auf einer festen Achse montiert ist und von einem Pleuel oder einer Stange angetrieben wird.
Hebel
Hebel werden nicht weniger häufig als Kurbelwellen, Pleuel und Schieber in Hebelmechanismen verwendet, da sie nicht nur sicherstellen, dass der Mechanismus seinen funktionellen Zweck erfüllt, da er sein Ausgangsglied ist, sondern auch als Zwischenglied Ändern der Größe und Richtung der übertragenen Bewegung und in einigen Fällen, um sie auf eine parallele oder senkrechte Ebene zu übertragen.
Auf Abb. 1 zeigt den Aufbau verschiedener Arten von Hebeln, die im Maschinenbau am häufigsten verwendet werden. Auf Abb. 1 A Es ist die Konstruktion eines zweiarmigen Hebels gezeigt, dessen Verbindungslöcher mit dem führenden und angetriebenen Glied auf einer Seite seiner Schwenkachse angeordnet sind. Auf Abb. 1 B die Konstruktion eines zweiarmigen Hebels ist gezeigt, dessen Verbindungslöcher mit dem antreibenden und angetriebenen Glied auf verschiedenen Seiten von seiner Schwenkachse angeordnet sind. Auf Abb. 1 v ist die Konstruktion eines zweiarmigen Hebels gezeigt, dessen Löcher zur Verbindung mit dem antreibenden und dem angetriebenen Glied in einem Winkel zueinander angeordnet sind und sich auf verschiedenen Seiten von seiner Schwenkachse befinden. Auf Abb. 1 G Die Konstruktion eines dreiarmigen Hebels ist gezeigt, dessen Löcher zum Verbinden mit dem antreibenden und angetriebenen Glied in einem Winkel zueinander angeordnet sind und sich auf verschiedenen Seiten von seiner Schwenkachse befinden. Auf Abb. 1 D Die Konstruktion eines zweiarmigen Hebels ist gezeigt, die Löcher zum Verbinden mit dem führenden und dem angetriebenen Glied sind in einem Winkel zueinander angeordnet und befinden sich auf derselben Seite der Achse seiner Schwingung, und der führende und der angetriebene Arm befinden sich in Form eines einzigen Elements hergestellt. Auf Abb. 1 e Die Konstruktion eines zweiarmigen Hebels eines schwer belasteten Hebelmechanismus ist gezeigt, bei dem die angetriebenen Arme, die sich auf der gegenüberliegenden Seite der Schwenkachse des Hebels in Bezug auf die Achse des Lochs im angetriebenen Arm befinden, eine Bewegung übertragen auf zwei angetriebene Stangen. Auf Abb. 1 Und ist ein zweiarmiger Hebel dargestellt, bei dem die im Winkel zueinander angeordneten führenden und angetriebenen Arme mit Löchern versehen sind, deren Achsen senkrecht zur Schwenkachse des Hebels angeordnet sind. Auf Abb. 1 Und zeigt die Konstruktion eines zweiarmigen Hebels mit einer vorgefertigten Struktur und bestehend aus einem antreibenden und einem angetriebenen Arm, die in Form von getrennten Teilen hergestellt sind, die starr an der Welle mittels Endverbindungen befestigt sind, die durch Schrauben festgezogen sind, während das Vorhandensein einer Welle vorhanden ist eine axiale Verschiebung der Hebelarme ermöglicht es dem Hebel, eine Bewegung in parallelen Ebenen zu übertragen. Auf Abb. 1 Zu Gezeigt ist die Konstruktion eines zweiarmigen Hebels, der einen ähnlichen Zweck wie das vorige Beispiel hat (Verschiebung der übertragenen Bewegung in einer parallelen Ebene), jedoch in einer Gussversion hergestellt ist und eine längliche zentrale Nabe in deren Loch hat es gibt Wälzlager, auf denen der Hebel auf einer gestellfesten Achse gelagert ist.
Reis. 1. Hebeldesign am meisten
allgemein im Maschinenbau verwendet.
Die in Abb. 1 A–1zh hergestellt durch Schweißen, werden üblicherweise in der Einzel- und Kleinserienfertigung verwendet. In der Groß- und Massenfertigung werden Hebel durch Stanzen oder Gießen hergestellt. Auf Abb. 2 zeigt den Aufbau gegossener Hebel. Auf Abb. 2 A ein gegossener Hebel, der in einer Helikopter-Taumelscheibe verwendet wird, und in Abb. 2 B gegossener Hebel, der in der Aufhängung eines Autos verwendet wird.
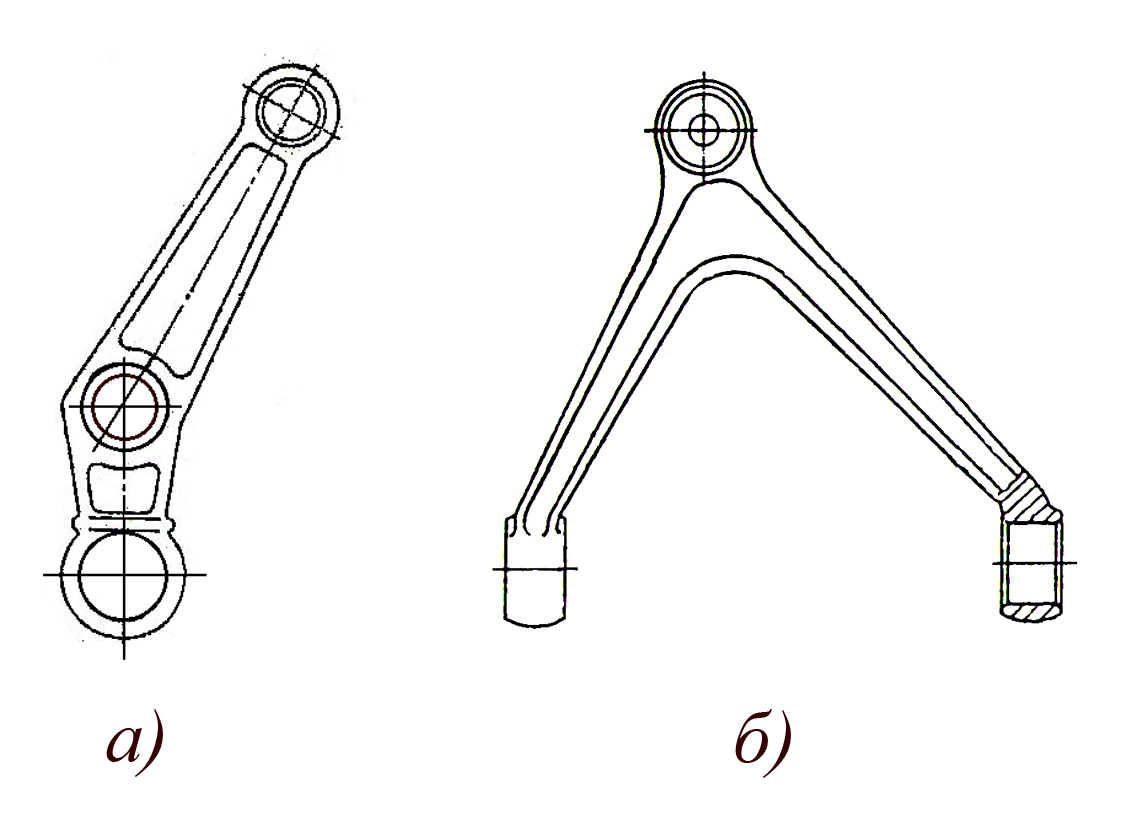 Reis. 2. Gusshebeldesign
Reis. 2. Gusshebeldesign
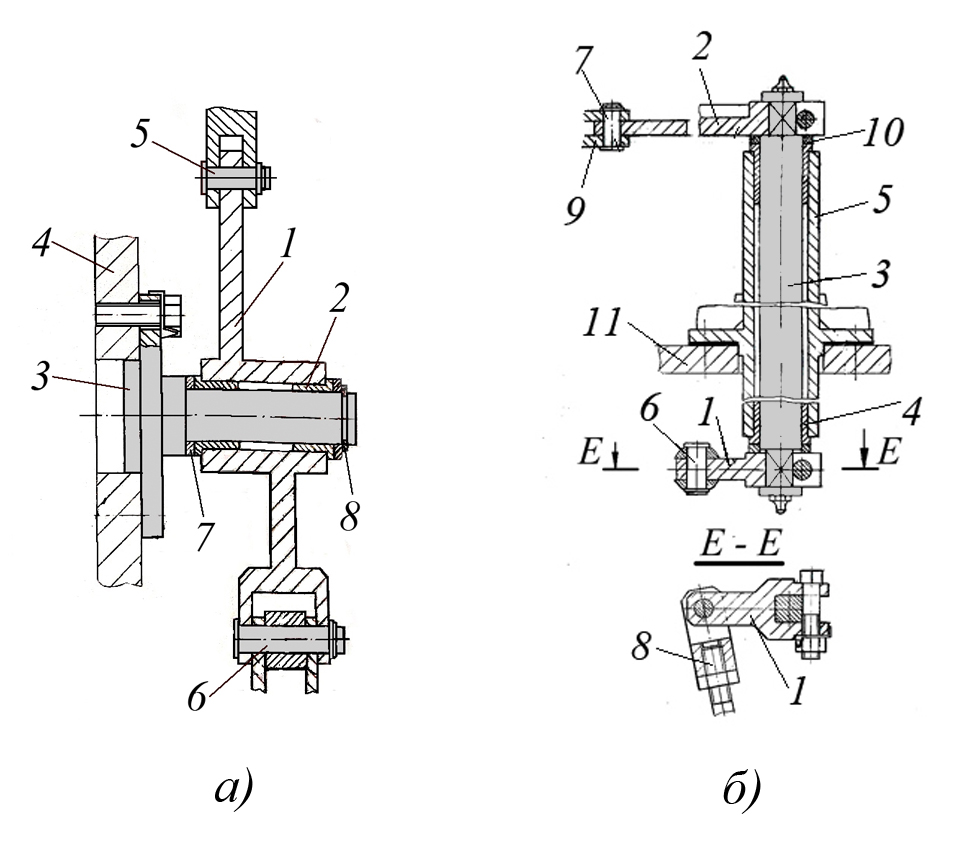
In einigen Fällen werden Hebel als Zwischenglied verwendet, mit denen Sie Bewegungen mit einem Versatz auf eine parallele Ebene übertragen können. Auf Abb. 3 A ist die Konstruktion des Hebels gezeigt, bei der zu diesem Zweck der führende und der angetriebene Arm parallel zueinander und um eine bestimmte Strecke verschoben sind. Dabei ist der Hebel 1 über Gleitlager 2 schwenkbar auf der Achse 3 gelagert, fest am Karosserieteil 4, während die in den Bohrungen der antreibenden und angetriebenen Hebelarme 5 und 6 befindlichen Achsen ihn mit den entsprechenden Lenkern verbinden der Hebelmechanismus, der den Hebel umfasst. Für die genaue Positionierung des Hebels 1 auf der Achse 3 sind Einstellringe 7 installiert, und die Arretierung des Hebels auf der Achse erfolgt durch den Sicherungsring 8.
 Reis. 3. Das Design von Hebeln, deren Schultern parallel zueinander sind
Reis. 3. Das Design von Hebeln, deren Schultern parallel zueinander sind
Freund und sind um eine gewisse Distanz versetzt.
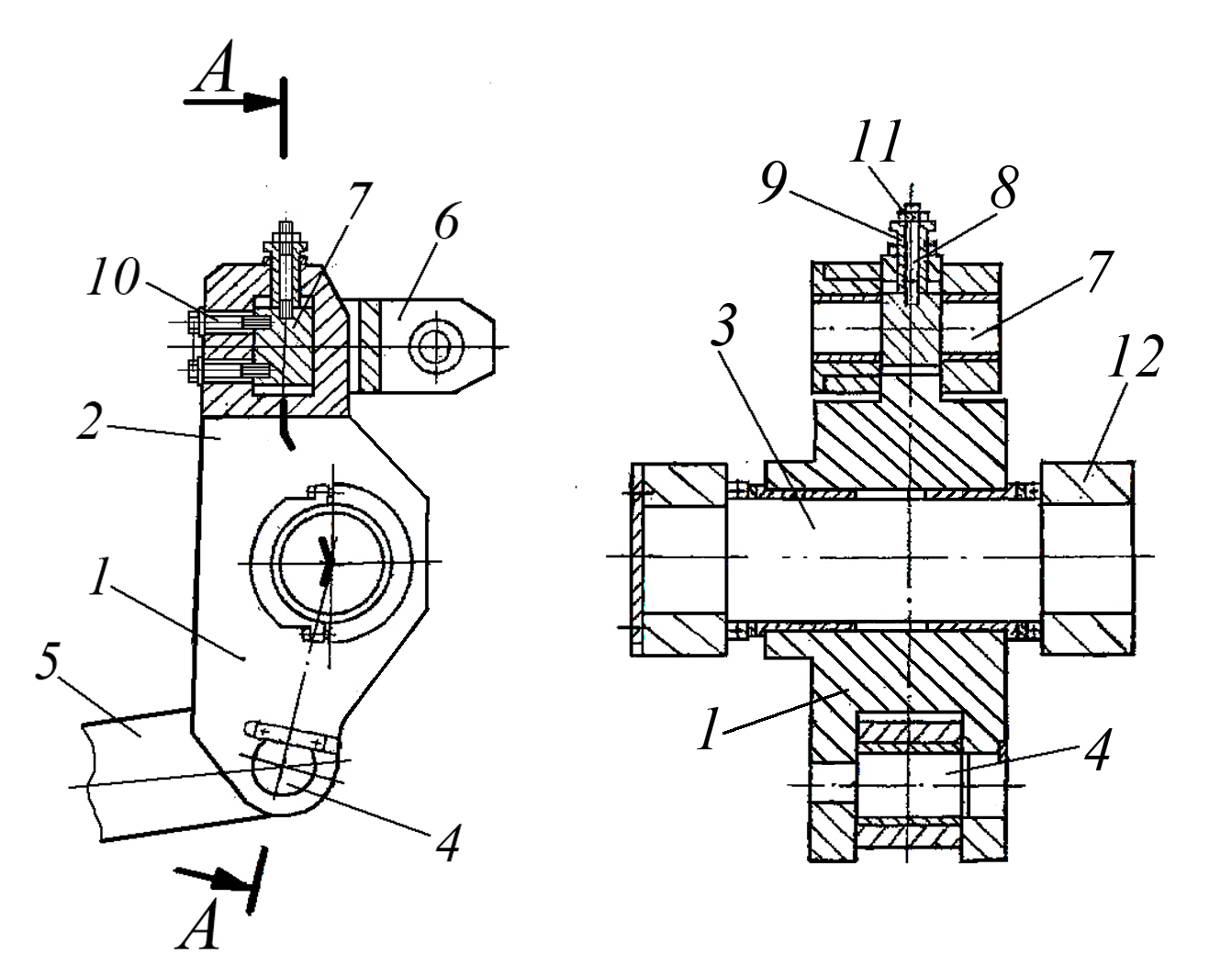
Auf Abb. 3 B ist der Aufbau des vorgefertigten Hebels dargestellt, bestehend aus dem vorlaufenden 1 und dem angetriebenen 2 Arm, die mittels Klemmverbindungen starr auf der Welle 3 befestigt sind. Die Rolle 3 auf den Lagern 4 ist in das Loch der Halterung 5 eingebaut, die am Rahmen 11 der technologischen Ausrüstung befestigt ist Der Antriebsarm 1 des Hebels ist schwenkbar mit der Antriebsstange 8 durch die Achse 6 verbunden und wird angetrieben Arm 2 des Hebels ist schwenkbar mit dem angetriebenen Verbindungsglied 9 des Hebelmechanismus durch die Achse 7 verbunden. Die Position der Rolle 3 relativ zur Halterung 5 wird durch die Einstellringe 10 bereitgestellt.
 Reis. 4. Das Design von vorgefertigten Hebeln.
Reis. 4. Das Design von vorgefertigten Hebeln.
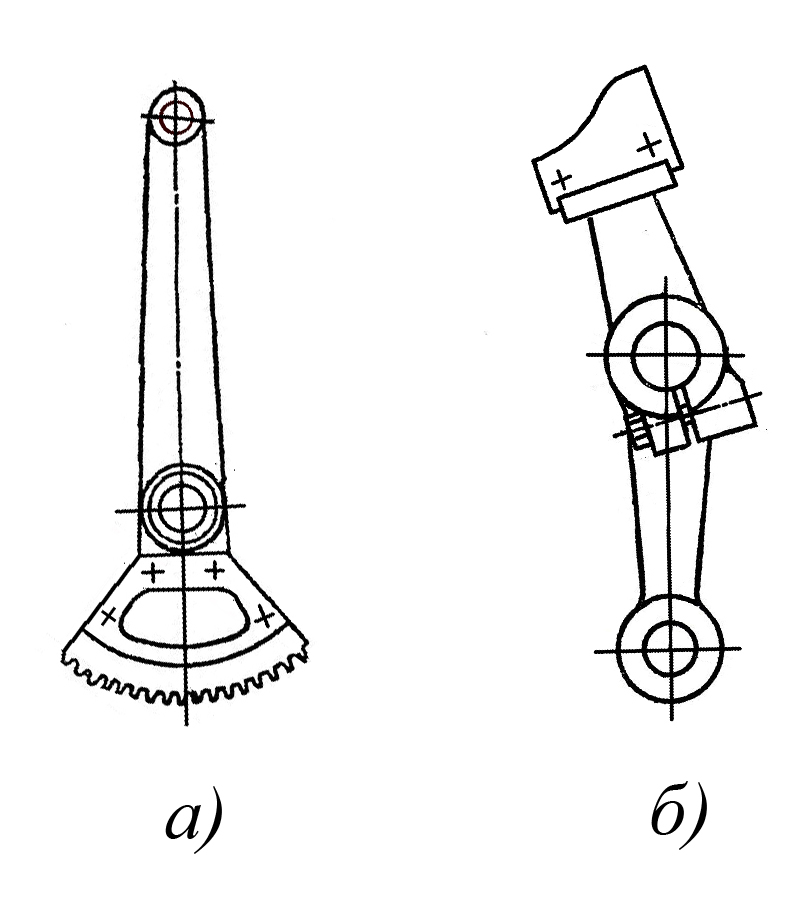
In automatischen Geräten werden Verbindungsmechanismen häufig in Verbindung mit Zahnrädern und Nockenmechanismen verwendet, während sie vorgefertigte Hebel enthalten können. Auf Abb. 4 zeigt die Gestaltungsmöglichkeiten für solche Hebel. Auf Abb. 4 A Dargestellt ist der Aufbau des vorgefertigten Hebels bestehend aus dem Hebel selbst und dem daran befestigten Zahnradsektor. Auf Abb. 4 B gezeigt ist der Aufbau des vorgefertigten Hebels bestehend aus einem Hebel und einem daran befestigten Flachnocken. In beiden Fällen sind zur zuverlässigen und genauen Fixierung sowohl des Zahnradsektors als auch des Nockens die entsprechenden Zentrier- und Anlageflächen im Hebel vorgesehen.
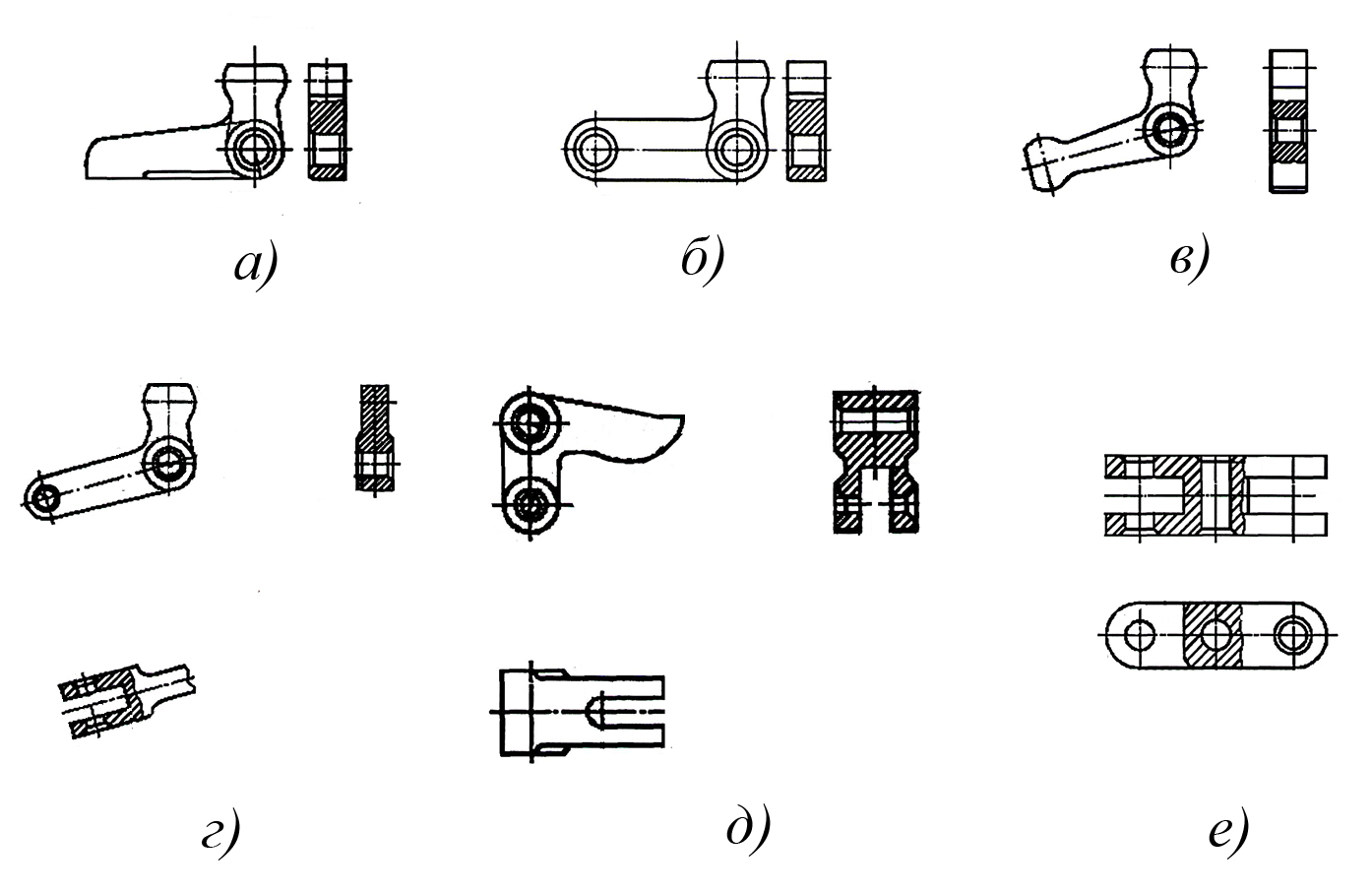 Reis. 5. Das Design von Hebeln, die in Bearbeitungsvorrichtungen verwendet werden.
Reis. 5. Das Design von Hebeln, die in Bearbeitungsvorrichtungen verwendet werden.
Hebel verschiedener Konstruktionen werden in großem Umfang in Bearbeitungsvorrichtungen verwendet. Auf Abb. 5 zeigt Optionen für standardisierte Hebelkonstruktionen, die in Bearbeitungsvorrichtungen verwendet werden:
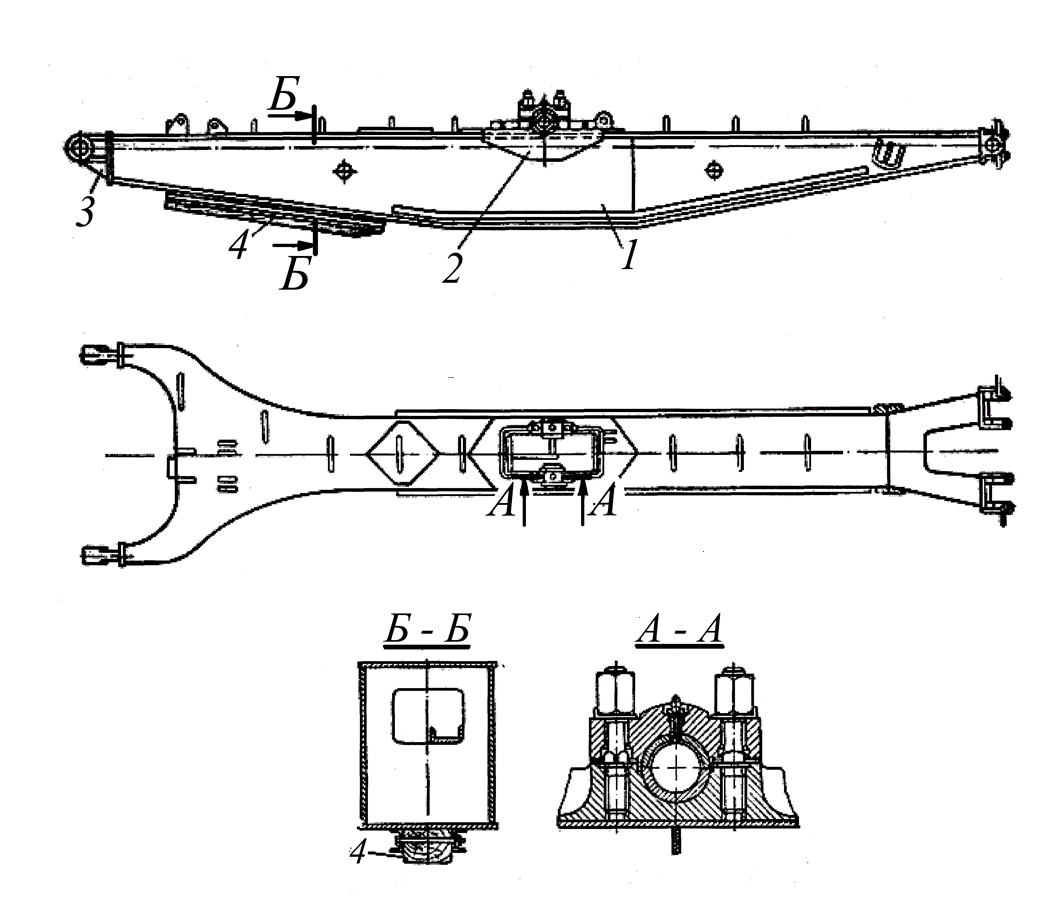
Hebelmechanismen werden häufig in Bau- und Straßenausrüstungen (Kränen, Baggern, Bulldozern) verwendet. In diesem Fall haben die in ihrer Zusammensetzung enthaltenen Hebel Gesamtabmessungen von mehreren Metern bis zu mehreren zehn Metern und werden daher durch Schweißen hergestellt. Auf Abb. 6 zeigt den Aufbau des geschweißten Baggerauslegers, der aus Träger 1, Halterung 2 zur Montage der Sattellagerwelle, Stoßdämpfer 3 und Ferse 4 besteht.
 Reis. 7. Konstruktionen aus Gummi-Metall
Reis. 7. Konstruktionen aus Gummi-Metall
Drehgelenke.
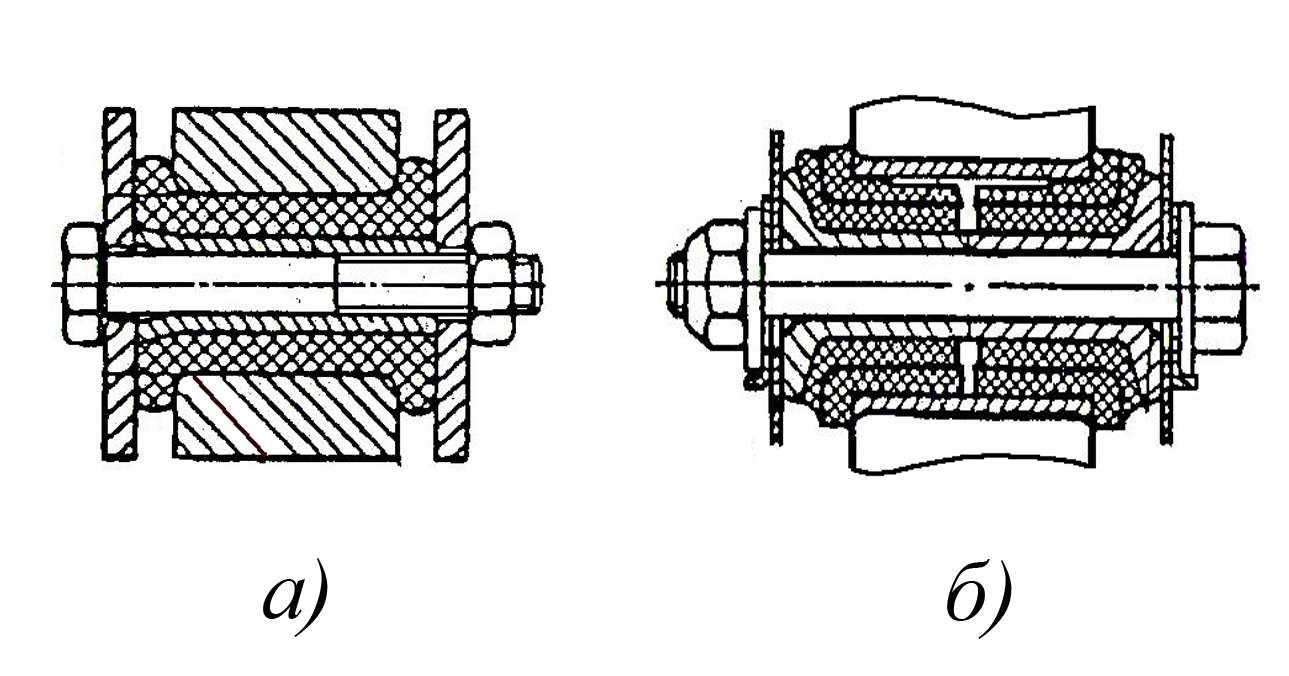
Schwenkgelenke von Hebeln mit Pleuelstangen und Stangen verwenden Gleit- und Wälzlager, Nadellager, Original- und Standardkugelgelenke, deren Konstruktionen im Artikel "Schwenkgelenke" besprochen werden. In einer Reihe von Fällen erfahren die Drehgelenke von Hebeln mit Pleuel oder Stange nicht nur Querkräfte, sondern arbeiten auch auf Torsion, was beispielsweise in Drehgelenken von Hebeln mit Stangen in einer Autoaufhängung auftritt. In diesen Fällen kommen Gummi-Metall-Verbindungen zum Einsatz (siehe Abb. 7).
 Reis. 8. Optionen zur Montage von Hebeln auf der Welle.
Reis. 8. Optionen zur Montage von Hebeln auf der Welle.
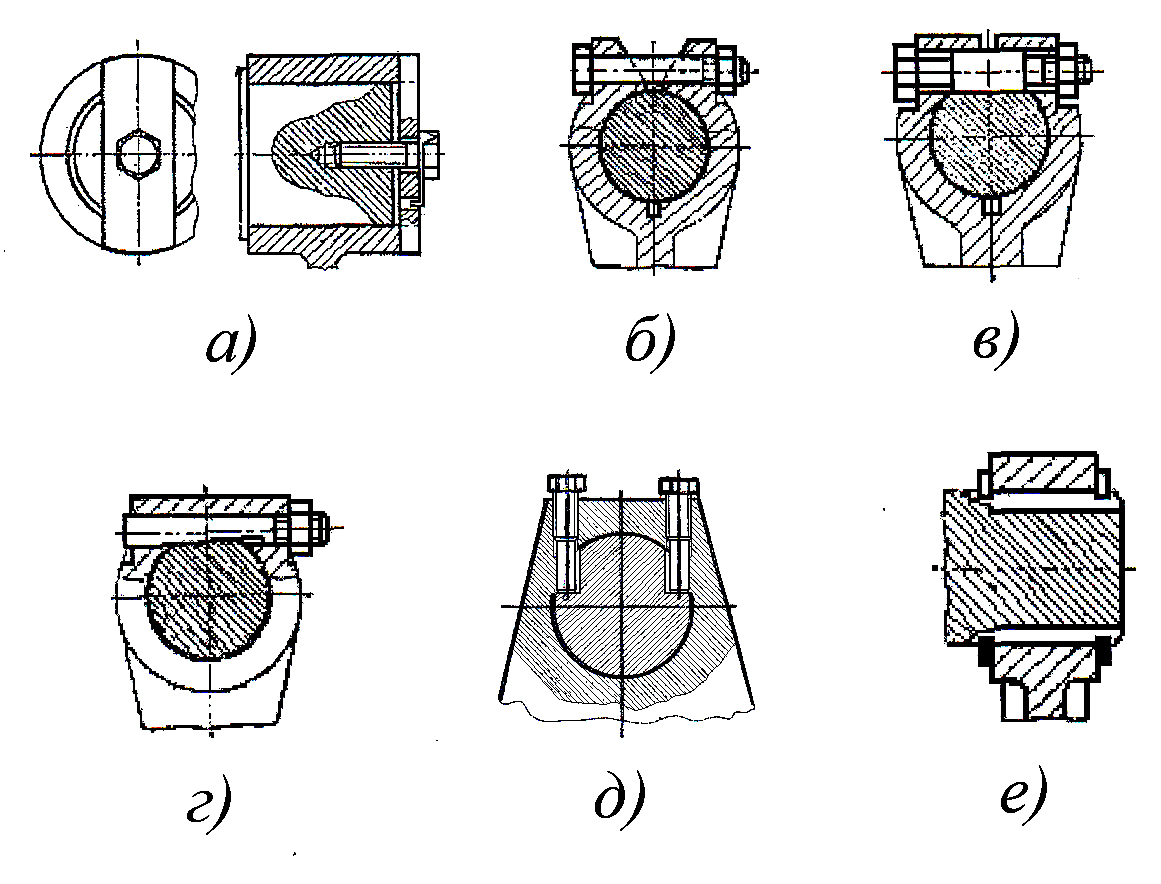
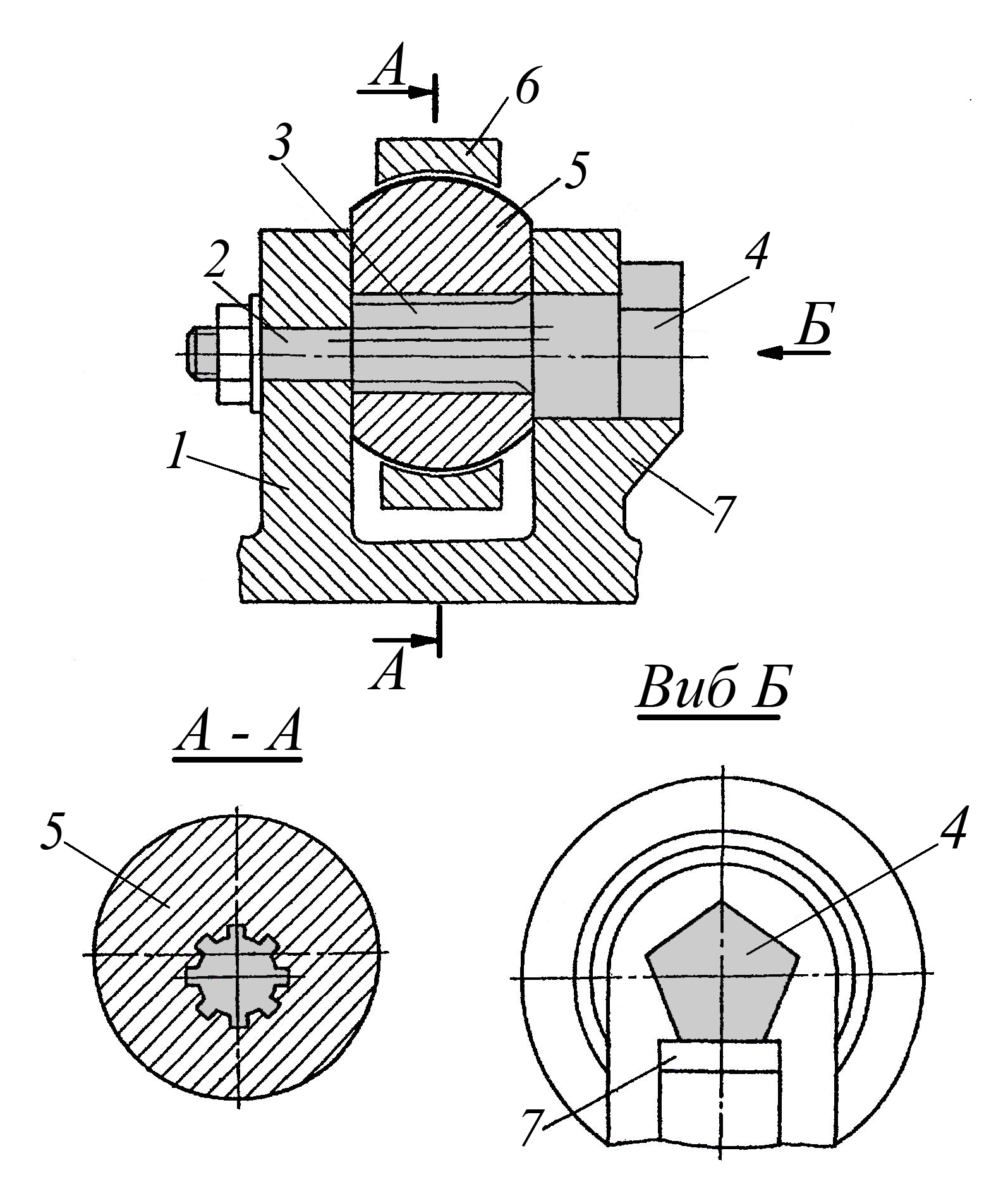
Ein wichtiges Element, das nicht nur die Ressource des Hebelmechanismus, sondern häufig auch seine Leistung maßgeblich bestimmt, ist die Verbindung des Hebels mit der Welle. , Drehmoment darauf übertragen. Diese Verbindung sollte die Beseitigung von Lücken, vorzeitigem Verschleiß oder Quetschen der Kontaktflächen während des Betriebs sowie die Einfachheit und Bequemlichkeit ihrer Demontage und Montage gewährleisten. Beispiele für solche Verbindungen sind in Abb. 8. In Abb. 8 A zeigt die Montage des Hebels auf der Welle, bei der das Drehmoment über die Endfeder in Kombination mit der Unterlegscheibe übertragen wird. Diese Befestigung wird in Hebelmechanismen verwendet, die mit niedrigen Geschwindigkeiten und wechselnden Lasten arbeiten. In diesem Fall wird der Endkeil normalerweise aus Stahl 45 hergestellt und auf eine Härte von HRC 35-40-Einheiten gehärtet, er wird auf der Welle und dem Hebel für die Passung H11 / d11 installiert. Die Verbindung ist einfach herzustellen und zuverlässig im Betrieb. Auf Abb. 8 B Es ist die Klemmverbindung der Welle mit dem Hebel dargestellt, bei der die Drehmomentübertragung aufgrund der Reibungskräfte zwischen der Außenfläche der Welle und dem Hebelloch erfolgt, die beim Anziehen mit einer Kupplungsschraube entstehen. Zur besseren Crimpung der Welle ist die zentrale Nut in den Hebel gefräst. Die Verbindung wird wie die vorherige in Mechanismen verwendet, die mit niedrigen Geschwindigkeiten und wechselnden Lasten arbeiten. Auf Abb. 8 v eine Verbindung gezeigt, bei der die Wellenklemmung mit ihrer Fixierung mittels einer Schraube kombiniert ist, deren mittlerer Abschnitt präziser als im üblichen Fall ausgeführt ist und fest gegen die Gegenfläche einer offenen zylindrischen Nut gedrückt wird, die an der angebracht ist Welle. Ein solcher Bolzen ist aus Stahl 45 hergestellt und auf eine Härte von HRC 35 - 40 Einheiten gehärtet, und sein Mittelteil ist gemäß H11 / d11 auf der Welle montiert. Über die Verbindung können erhebliche Drehmomente übertragen werden. Die in Abb. 8 D. Die Drehmomentübertragung erfolgt dabei durch Reibungskräfte zwischen der Welle und dem Hebel, die durch das Anziehen zweier Einstellschrauben und das Anlegen dieser Schrauben an den Abflachungen der Welle erzeugt werden. Bei dieser Verbindungsausführung ist der mit der Welle in Kontakt stehende Bolzenschaft ebenfalls auf eine Härte von HRC 35–40 Einheiten gehärtet. Auf Abb. 8 G eine Verbindung gezeigt, bei der die Drehmomentübertragung von der Welle auf den Hebel mittels einer Keilachse erfolgt, die den Hebel durch Kontakt mit der an der Welle angebrachten Gegenfläche fixiert. Diese Verbindung wird in Hebelmechanismen verwendet, die mit hohen Geschwindigkeiten und Lasten arbeiten. Bei Hebelmechanismen, die unter Bedingungen wechselnder dynamischer Belastungen bei erheblichen Geschwindigkeiten arbeiten, erfolgt ihre Verbindung mit der Welle über eine Evolventenkeilverbindung, die auf der Seitenfläche zentriert ist, wie in Abb. 8 e. Die Innenverzahnung im Hebel wird durch Ziehen hergestellt, daher ist bei Einzel- oder Kleinserienfertigung solcher Gelenke von Hebeln mit Welle der Einsatz von Evolventenverzahnungen wirtschaftlich nicht vertretbar.
Um die spezifischen Anforderungen an Hebelgetriebe zu erfüllen, zu denen auch Hebel gehören und die hauptsächlich vom Technologiebereich abhängen, in dem sie eingesetzt werden, und unabhängig davon, ob es sich um ein Abtriebs- oder ein Zwischenglied handelt, können verschiedene Zusatzeinrichtungen eingebaut werden, die es ermöglichen:
- den Mechanismus vor Überlastung schützen,
- die Länge der Hebelarme anpassen,
- stellen Sie den Winkel des Hebels ein.
Betrachten Sie einige Beispiele für solche Geräte, die in Hebel eingebaut sind.
 Reis. 9. Das Design der Sicherheit
Reis. 9. Das Design der Sicherheit
leicht in den Hebel eingebautes Gerät
geladener Mechanismus.
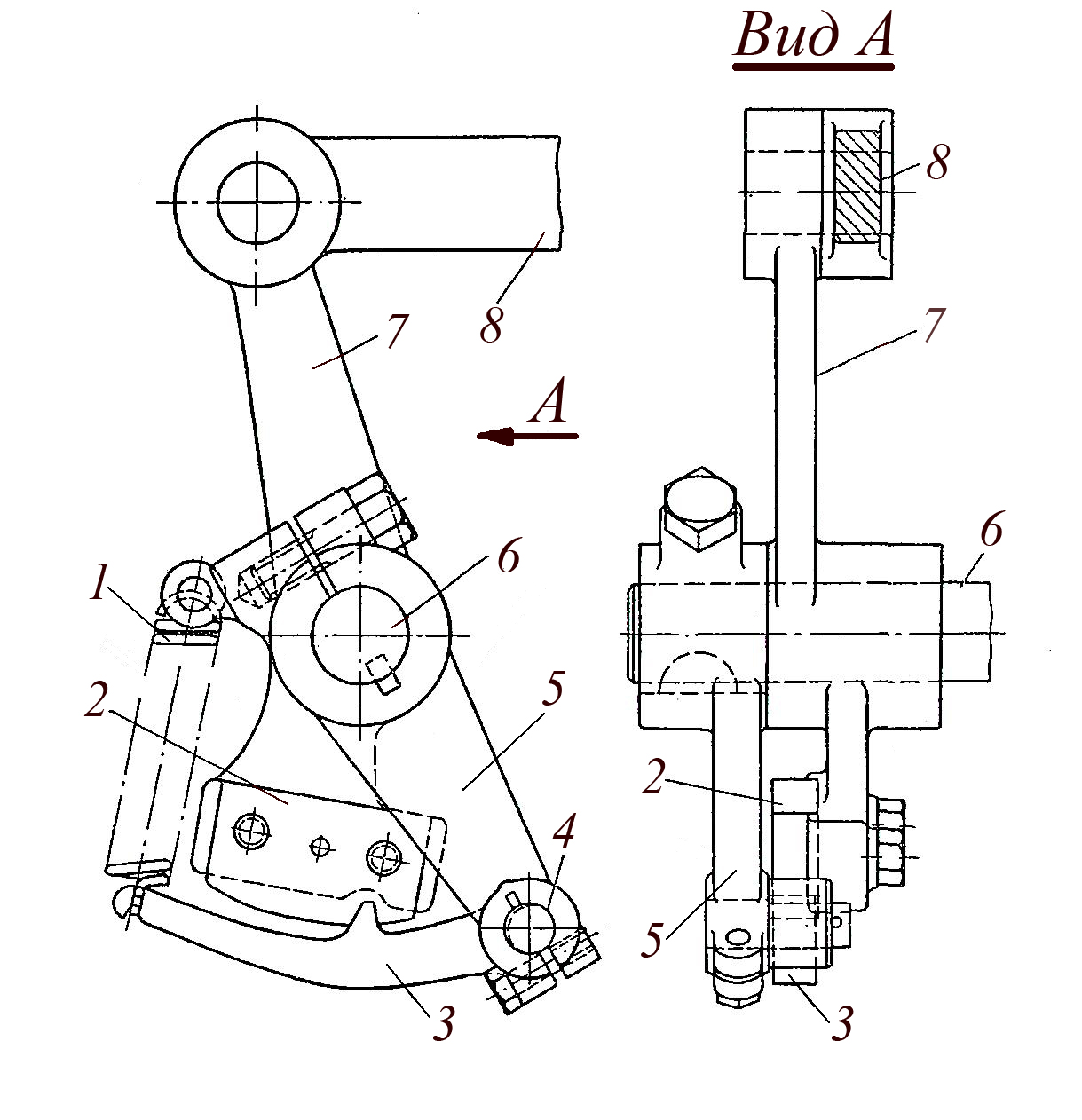
Auf Abb. 9 zeigt die Konstruktion der in den Hebel eines leicht belasteten Mechanismus eingebauten Sicherheitsvorrichtung, die die Beendigung der Bewegungsübertragung durch den Hebel sicherstellt, wenn mehr als die zulässige Kraft auf seinen angetriebenen Teil ausgeübt wird. Es enthält eine Welle 6, auf der der Hebel 7 schwenkbar gelagert ist, ebenfalls schwenkbar mit der Verbindungsstange 8 verbunden, wobei der Hebel 5 starr an der Welle 6 mittels Keil- und Klemmverbindungen befestigt ist, während der Hebel 5 schwenkbar mit verbunden ist der Riegel 3 wird ständig von der Spannfeder 1 an die Platte 2 gedrückt, die an dem Hebel 7 befestigt ist. Der Kontakt des Riegels 3 mit der Platte 2 wird mittels eines Zahns ausgeführt, der in den entsprechenden Hohlraum eintritt. Wenn eine erhöhte Kraft auf die Verbindungsstange 8 wirkt, dehnt sich die Feder 1 und der Rastzahn 3 kommt aus dem Hohlraum der Platte 2 und die Bewegung vom Hebel 5 auf den Hebel 7 wird nicht übertragen, während der Hebel 5, wird auf der Welle befestigt, schwingt weiter. Nachdem die Wirkung der erhöhten Kraft aufhört, tritt der Zahn des Riegels 3 wieder frei in die Nut der Platte 2 ein und der Hebel 7 beginnt sich mit dem Hebel 5 als Ganzes zu bewegen, während er die Bewegung auf die Verbindungsstange 8 überträgt.
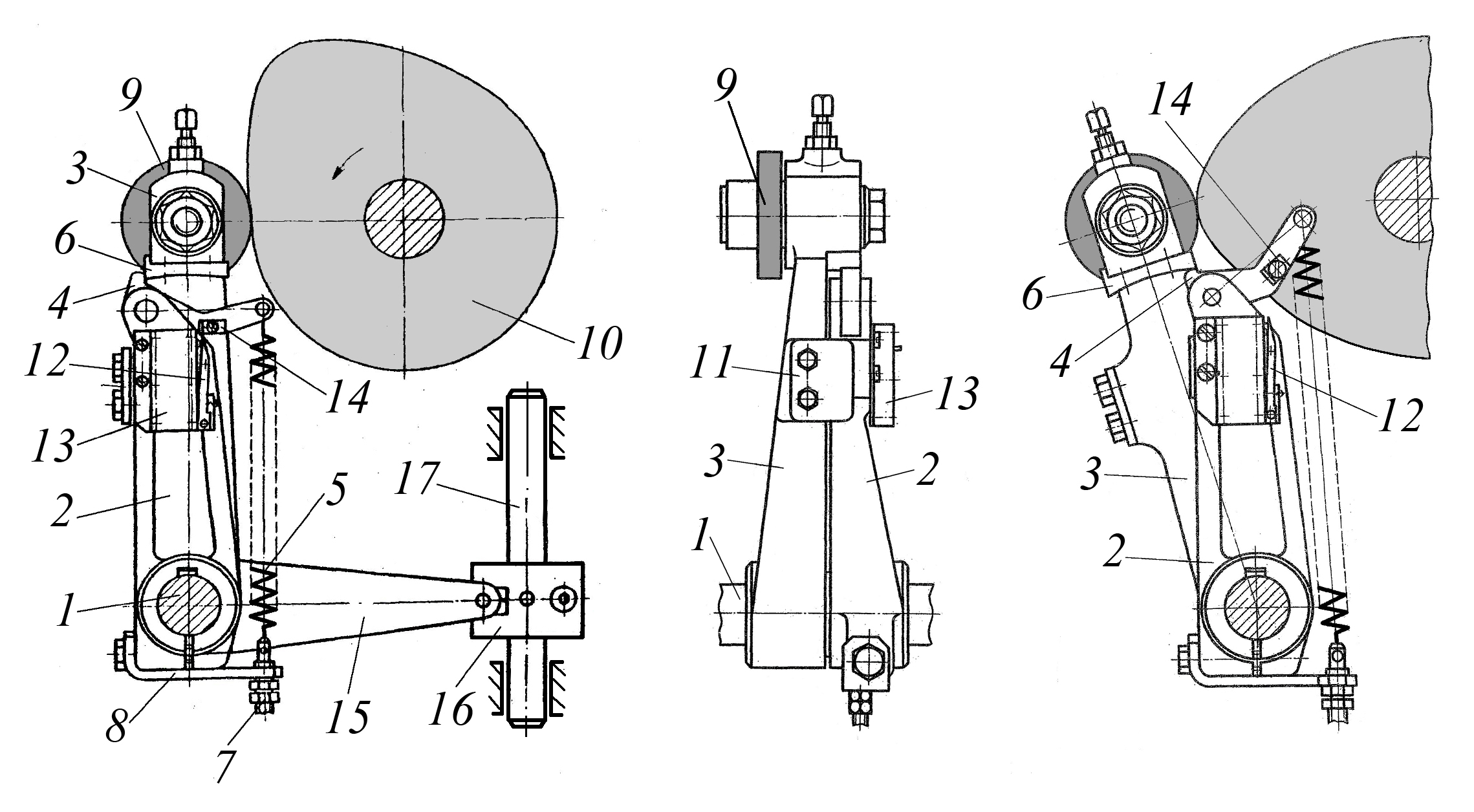 Reis. 10. Im Nockenhebel eingebaute Kraftsicherung.
Reis. 10. Im Nockenhebel eingebaute Kraftsicherung.
Auf Abb. Fig. 10 zeigt den Aufbau der in den vorgefertigten zweiarmigen Hebel eingebauten Sicherheitsvorrichtung, die der Schieber des Nockenmechanismus ist. Es enthält einen vorgefertigten zweiarmigen Hebel, der auf der Welle 1 befestigt ist, bestehend aus einem Kipphebel 3 mit einer Rolle 9 in Kontakt mit dem Nocken 10 und einem zweiarmigen Hebel 2, dessen vorderer Arm einen Vorsprung 4 aufweist, der von dem gedrückt wird Feder 5 am Anschlag 6 des Kipphebels 3, und der angetriebene Arm 15 des Hebels 2 ist schwenkbar mit dem Gehäuse 16 verbunden, das an der angetriebenen Stange 17 befestigt ist. Am Hebel 2 ist der Mikroschalter 13 in Kontakt mit dem Schalthebel 12 , sowie den Anschlag 14, der mit dem Schalthebel 12 zusammenwirken kann. Die Rolle 9 des Kipphebels 3 wird mittels einer Feder (in Fig. 193 nicht gezeigt) ständig gegen den Nocken 10 gedrückt, und das Zusammenwirken von der Kipphebel 3 mit dem zweiarmigen Hebel 2, wenn der Kipphebel im Uhrzeigersinn gedreht wird, wird mittels der Stange 11 ausgeführt.
Das Gerät funktioniert wie folgt. Während des normalen Betriebs des Mechanismus (ohne Überlastung) überträgt der Nocken 10 über die Rolle 9 eine Kippbewegung auf den Kipphebel 3, der durch Kontakt seines Anschlags 6 mit dem Vorsprung 4 des zweiarmigen Hebels 2 informiert letztere von der Schaukelbewegung, und ihr angetriebener Arm 15, der mit dem auf der Stange 17 befestigten Körper 16 zusammenwirkt, informiert sie über eine Translationsbewegung (die Stange macht einen Arbeitshub). Wenn der Kipphebel 2 im Uhrzeigersinn schwingt, wird die Bewegung des Hebels 3 mittels der Stange 11 übertragen, und der angetriebene Arm 15 des Hebels 2 weist die Stange 17 an, sich in die entgegengesetzte Richtung zu bewegen (die Stange läuft leer), indem sie mit ihr zusammenwirkt durch den Körper 16. Bei dieser gegenseitigen Anordnung des Kipphebels 3 und des vorderen Arms des Hebels 2 wirkt der Anschlag 14 auf den Schalthebel 12, der seinerseits den Mikroschalter 13 schließt. Wenn die Last auf die Stange 17 aufgebracht wird über den zulässigen hinaus ansteigt, wenn er einen Arbeitshub ausführt, stoppt letzterer zusammen mit dem Körper 16 und dem zweiarmigen Hebel 2, und der Nocken 10, der die Drehung in der gleichen Richtung fortsetzt, wirkt auf die Rolle 9 und die Wippe ein Arm 3, der die Kraft der Feder 5 überwindet, dreht sich gegen den Uhrzeigersinn. Dadurch gibt der Anschlag 14 den Schalthebel 12 frei und dieser schaltet den Mikroschalter 13 aus, der gleichzeitig den Maschinenantrieb durch die Elektroautomatik stoppt.
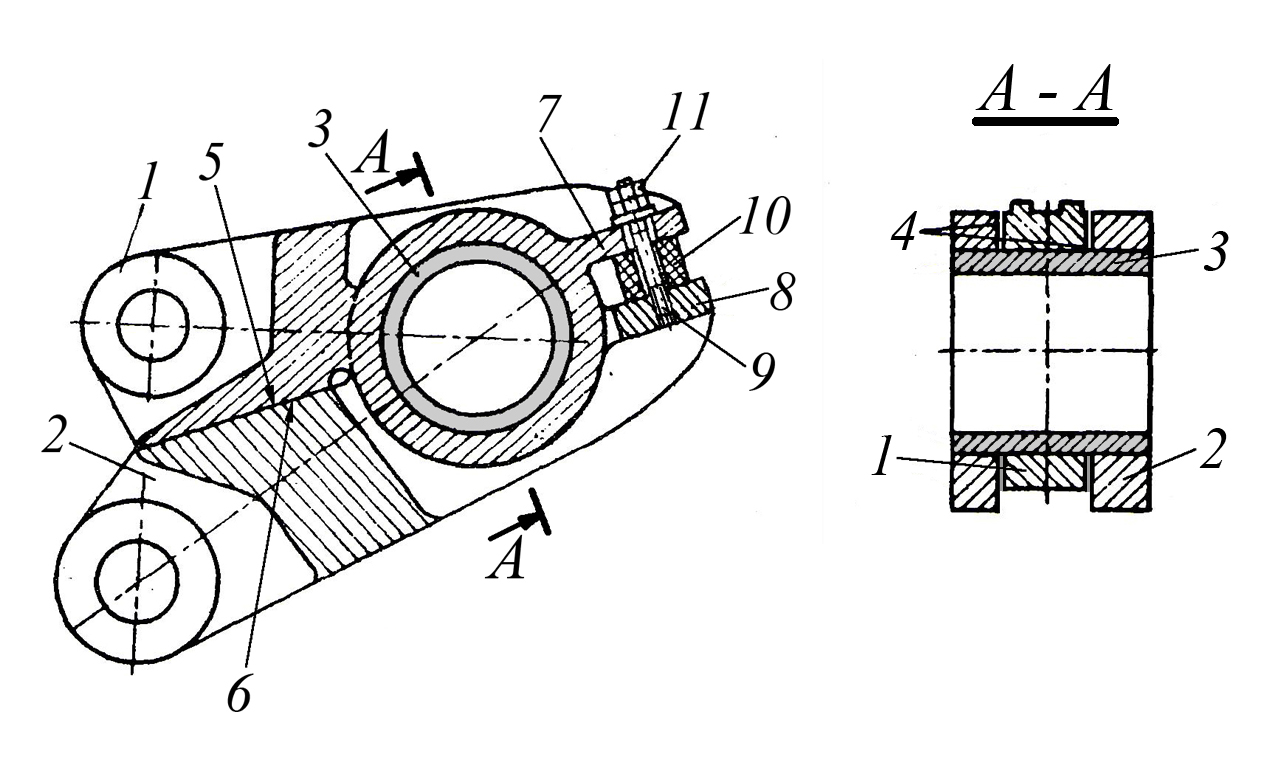 Reis. 11. Das Design des vorgefertigten Hebels, der eine Vorrichtung zum Ausgleich dynamischer Belastungen enthält.
Reis. 11. Das Design des vorgefertigten Hebels, der eine Vorrichtung zum Ausgleich dynamischer Belastungen enthält.
Auf Abb. Fig. 11 zeigt den Aufbau des vorgefertigten Hebels, der eine Einrichtung zum Ausgleich dynamischer Belastungen enthält, die der Wirkung der vom Hebelmechanismus übertragenen technologischen Kraft entgegenwirken. Dieser Hebel enthält die vordere 1 und die angetriebene Schulter 2, die durch die Gleithülse 3 miteinander verbunden sind, und der vordere Arm 1 ist an der Hülse befestigt und der angetriebene Arm 2 ist darauf drehbar. Zwischen den Enden der Naben der Arme 1 und 2 sind Antifriktionsringe 4 installiert. Der Kontakt der Arme 1 und 2 erfolgt entlang der Stützflächen 5 und 6. Auf den Oberflächen der Arme 1 und 2 der Hebel sind Ösen 7 und 8 hergestellt, in deren Löchern ein Stift 9 installiert ist, der die Ösen mittels Muttern 11 durch den elastischen Einsatz 10 in Form einer Hülse festzieht.
Während des Betriebs des Mechanismus, der einen vorgefertigten Hebel umfasst, wird die technologische Kraft von dem Antriebsarm 1 auf den angetriebenen Arm 2 durch die Stützflächen 5 und 6 übertragen. Wenn während des Betriebs des Mechanismus dynamische Belastungen in der entgegengesetzten Richtung auftreten Durch die Wirkung der technologischen Kraft beginnt sich der angetriebene Arm 2 mit seiner Fläche 6 von der Stützfläche 5 des führenden Hebels 1 zu lösen und dreht sich gleichzeitig gegen den Uhrzeigersinn relativ zum führenden Arm 1. Dadurch wird der elastische Einsatz 10 zwischen den Laschen 7 und 8 befestigt, komprimiert und kompensiert die Auswirkung der dynamischen Belastung auf den Mechanismus und dämpft auch effektiv die resultierenden Schwingungen des Teilemechanismus.
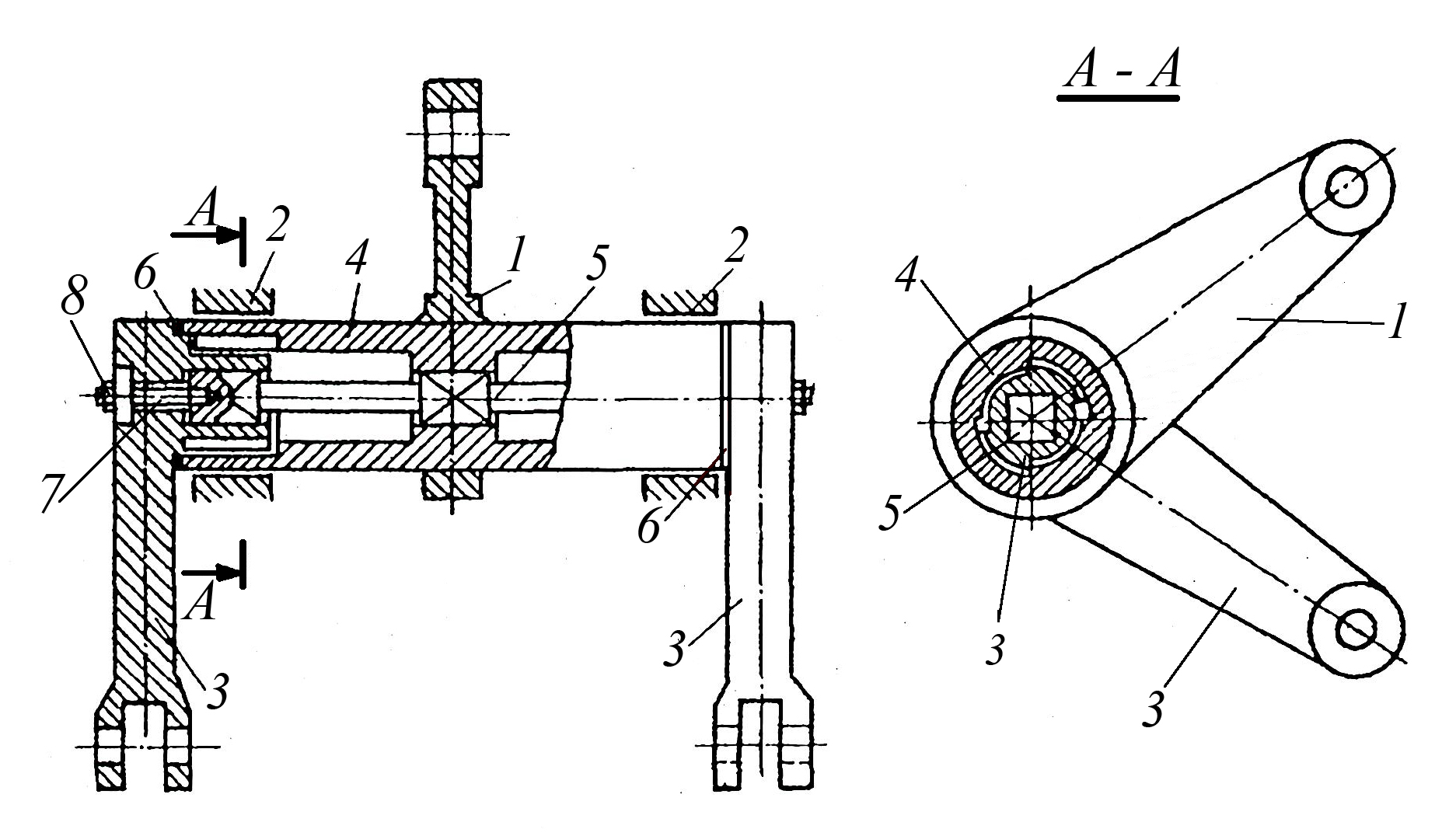 Reis. 12. Das Design des vorgefertigten Hebels, der eine Torsionsrolle enthält
Reis. 12. Das Design des vorgefertigten Hebels, der eine Torsionsrolle enthält
um dynamische Belastungen zu kompensieren.
Auf Abb. Fig. 12 zeigt den Aufbau des vorgefertigten Hebels, der eine Torsionsrolle enthält, um dynamische Belastungen zu kompensieren, die entgegen der Wirkung der technologischen Kraft wirken, die von dem Hebelmechanismus übertragen wird. Dieser Hebel besteht aus einem Antriebsarm 1, der starr mit der Hülse 4 verbunden ist, schwenkbar in den Stützen 2 gelagert ist und mit zwei an seinen Enden befindlichen angetriebenen Hebelarmen 3 in Kontakt steht und mit ihm mittels einer innen liegenden Torsionswelle 5 verbunden ist der Ärmel. Gleichzeitig werden die angetriebenen Arme 3 des Hebels durch reibungsarme Dichtungen 6 gegen die Enden der Hülse 4 mittels Bolzen 7 und Muttern 8 gedrückt. 4, gegenseitige radiale Nuten werden hergestellt, die Lücken mit den Enden bilden die radialen Vorsprünge. Beim Zusammenbau des Hebels als Teil des Mechanismus wird die Torsionswelle 5 vorläufig so verdreht, dass der Spalt zwischen den Enden der radialen Vorsprünge der Stifte der angetriebenen Arme 3 und den Enden der gegenseitigen radialen Nuten der Hülse entsteht 4 wird ausgewählt, wenn sie sich während der Übertragung der technologischen Kraft durch den Hebel berühren.
Während des Betriebs des Mechanismus, der den vorgefertigten Hebel umfasst, wird die technologische Kraft vom Antriebsarm 1 durch die Hülse 4 und die Enden ihrer Radiusnuten auf die Enden der Radiusvorsprünge an den Stiften der angetriebenen Arme 3 übertragen. und letztere führen eine Schaukelbewegung aus und übertragen sie auf das Ausgangsglied des Mechanismus. Wenn eine dynamische Belastung auftritt, die in der der Wirkung der technologischen Kraft entgegengesetzten Richtung wirkt, beginnen sich die angetriebenen Arme 3 in die entgegengesetzte Richtung zu drehen und verdrehen zusätzlich die Torsionsrolle 5, deren elastische Verformung die Wirkung von Trägheitsbelastungen verringert die Mechanikteile.
 Reis. 13. Das Design des zusammengebauten Hebels eines schwer belasteten Mechanismus mit einer eingebauten Kraftsicherung.
Reis. 13. Das Design des zusammengebauten Hebels eines schwer belasteten Mechanismus mit einer eingebauten Kraftsicherung.
Die erwogenen gewaltsam in die Hebel eingebauten Sicherungen sind vom wiederherstellbaren Typ, was ihre Verwendung ziemlich effektiv macht, aber leider ist ihre Verwendung in schwer belasteten Hebelmechanismen unmöglich. Zerstörbare Kraftsicherungen sind in die Hebel stark belasteter Mechanismen eingebaut. Gezeigt in Abb. Gemäß Fig. 13 enthält der zusammengebaute Hebel mit eingebauter Kraftsicherung einen Antriebsarm 1, der mittels einer Schiebemuffe 2 an einer starr am Rahmen 4 befestigten Achse 3 schwenkbar gelagert ist, während der Abtriebsarm 6 des Hebels ebenfalls schwenkbar gelagert ist auf der gleichen Achse 3 mittels einer Gleithülse.Beide Hebel sind unter Verwendung eines Scherbolzens 10 verbunden, derin Buchsen 7 , 8 und 9 eingebaut ist, die in das Loch des Antriebshebels 1 und das Loch des angetriebenen Hebels 6 gedrückt werden die durch den zusammengebauten Hebel übertragene Kraft den zulässigen Wert überschreitet, dann wird der Stift 10 abgeschert und die Verbindung des angetriebenen Arms 1 mit dem führenden Arm 6 des Hebels wird beendet, und dies verhindert, dass die komplexeren und teureren Teile des Mechanismus brechen.
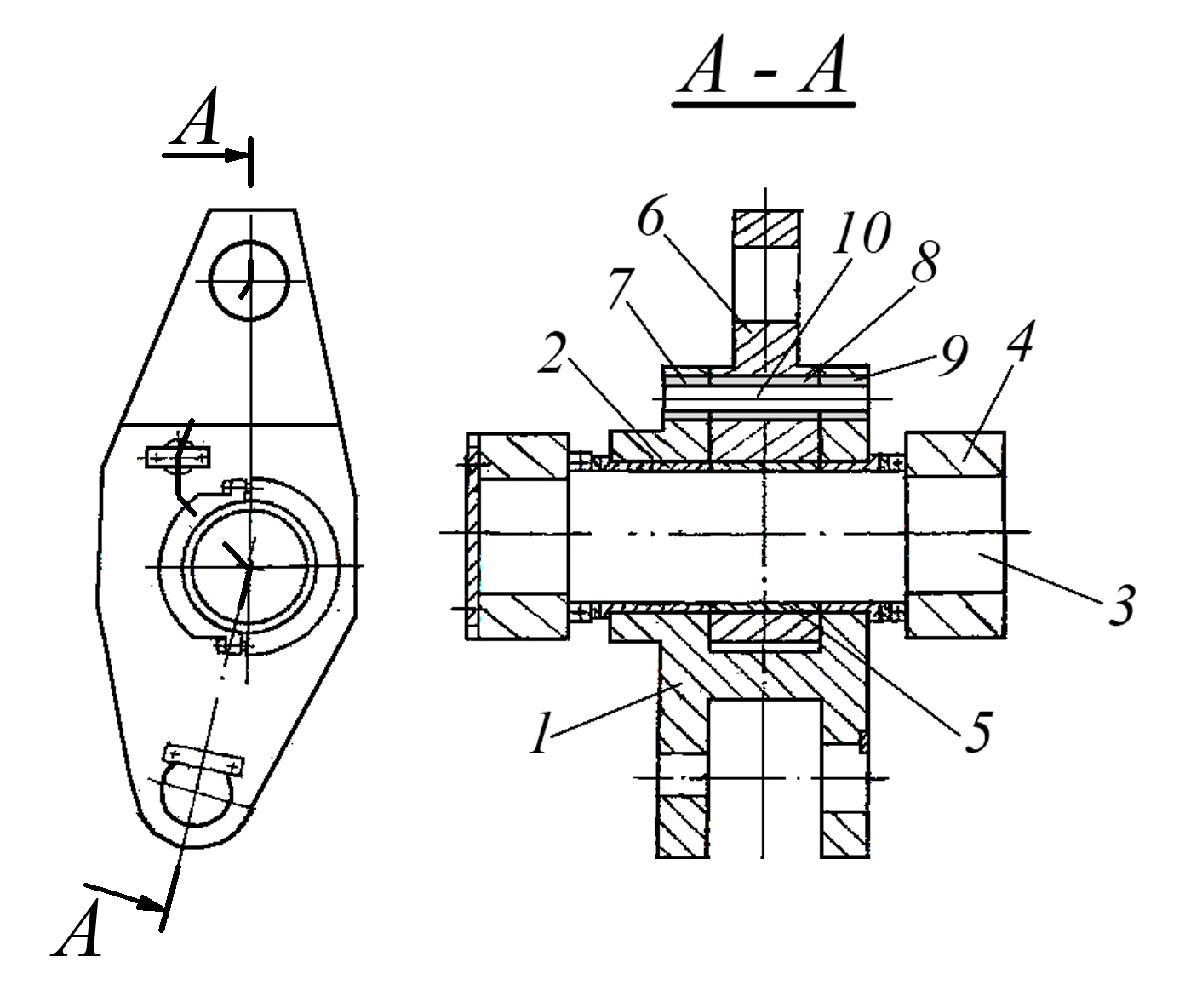
 Reis. 14. Eine in den Hebel eines leicht belasteten Gestänges eingebaute Vorrichtung, mit der Sie die Länge des Führungsarms einstellen können.
Reis. 14. Eine in den Hebel eines leicht belasteten Gestänges eingebaute Vorrichtung, mit der Sie die Länge des Führungsarms einstellen können.
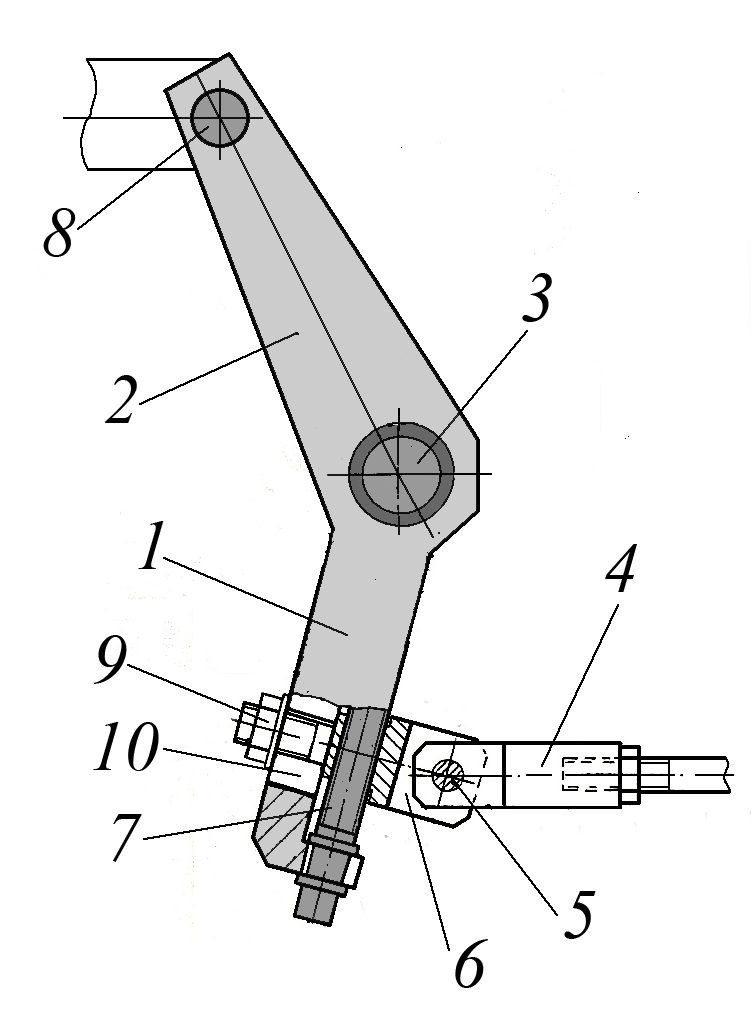
Auf Abb. Fig. 14 zeigt eine in den Arm eines leicht belasteten Gestänges eingebaute Vorrichtung, die eine Einstellung der Länge ihres Führungsarms ermöglicht. In diesen Hebel, bestehend aus dem führenden 1 und dem angetriebenen 2 Arm und auf der Achse 3 gelagert, ist ein Finger 6 eingebaut, schwenkbar mittels der Achse 5 mit der Antriebsstange 4 verbunden und in der erforderlichen Position in der Nut fixiert 10 mit Hilfe der Mutter 9 und einer Stellschraube 7. Gleichzeitig ist der Abtriebsarm 2 des Hebels mittels der Achse 8 schwenkbar mit dem Abtriebsglied des Hebelmechanismus verbunden. Beim Einstellen der Länge des Führungsarms 1 des Hebels wird die Mutter 9 abgeschraubt, dann wird der Finger 6 mit der Einstellschraube 7 auf die eine oder andere Seite entlang der Nut des Führungsarms 1 des Hebels bewegt und dann die Finger 6 wird anschließend mit der Mutter 9 arretiert.
 Reis. 15. Das Design des Geräts, das in den Hebel eines stark belasteten Gestänges eingebaut ist und eine Anpassung ermöglicht
Reis. 15. Das Design des Geräts, das in den Hebel eines stark belasteten Gestänges eingebaut ist und eine Anpassung ermöglicht
die Länge seiner angetriebenen Schulter.
Auf Abb. 15 zeigt das Design einer Vorrichtung, die in den Hebel eines schwer belasteten Verbindungsmechanismus eingebaut ist, mit dem Sie die Länge des angetriebenen Arms einstellen können. In diesen Hebel, bestehend aus dem vorderen 1 und dem angetriebenen Arm 2 und schwenkbar mittels der Achse 4 mit der Antriebsstange verbunden und auf der Achse 3 montiert, ist die Achse 7 eingebaut, die sich im Fenster seines angetriebenen Arms befindet, die den Arm 2 mit der angetriebenen Stange 6 verbindet. In diesem Fall ist der Achshebel 3 starr im Rahmen 12 befestigt. Die Achse 7 hat in ihrem mittleren Teil eine prismatische Form und befindet sich in der Nut des angetriebenen Arms 2 von der Hebel, der ihm die Möglichkeit gibt, sich zu bewegen, was eine Änderung seines Abstands von der Achse 3 vorsieht. Diese Konstruktion der Achse 7, deren Bewegung in der Nut des angetriebenen Arms 2 des Hebels ausgeführt wird aus einem Bolzen 8 und einer Gewindebuchse 9 und die Befestigung in der erforderlichen Position mittels Bolzen 10 und Muttern 11 ermöglicht es Ihnen, die Länge des angetriebenen Arms 2 des Hebels zu ändern, was notwendig ist, wenn Sie den Hub des Ausgangsglieds einstellen des Hebelmechanismus, der den Hebel umfasst.
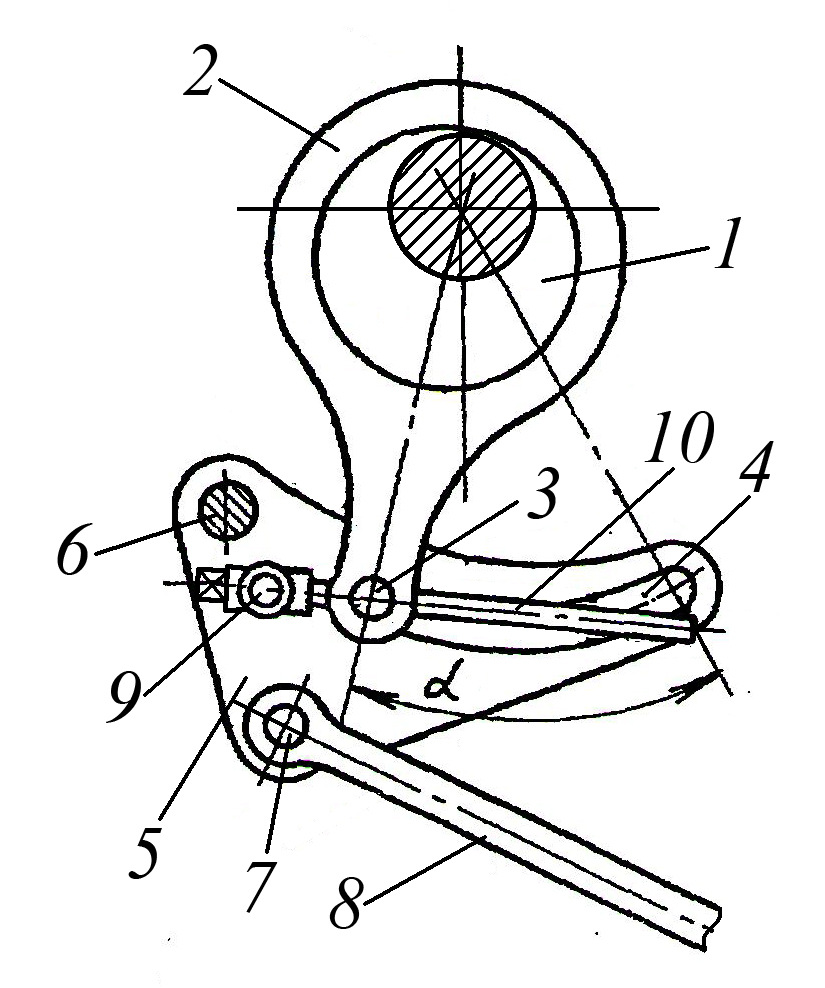 Abb. 16 Das Design des Mechanismus zum Einstellen der Länge des Hebelarms, bei dem sich seine Winkelposition nicht ändert.
Abb. 16 Das Design des Mechanismus zum Einstellen der Länge des Hebelarms, bei dem sich seine Winkelposition nicht ändert.
Der Nachteil der Konstruktion von Vorrichtungen zum Einstellen der Länge des Hebelarms besteht darin, dass sich bei der Einstellung die Winkelposition des Hebels relativ zur Schwenkachse ändert, was in einigen Fällen nicht akzeptabel ist. Fig. 16 zeigt die Konstruktion des Mechanismus zum Einstellen der Länge des Hebelarms, währenddessen sich seine Winkelposition nicht ändert. Dieser Mechanismus enthält eine Kurbelwelle 1, auf deren Kurbelwellenhals eine Pleuelstange 2 installiert ist, die mittels Fingerraupen 3 schwenkbar mit einem zweiarmigen Zwischenhebel 5 verbunden ist, der unter Verwendung einer Achse 6 , ist schwenkbar an dem Rahmen montiert (in Fig. 16 nicht gezeigt) und sein angetriebener Arm ist durch eine Achse 7 mit der angetriebenen Stange 8 verbunden. Gleichzeitig ist ein Stift 9 schwenkbar an dem Hebel 5 in dem Loch montiert in der die Leitspindel 10 eingebaut und in axialer Richtung fixiert ist und deren Gewindeende mit der Gewindebohrung im Stift 3 zusammenwirkt, der sich mit Bewegungsmöglichkeit in der Radiusnut 4 des Hebels 5 befindet und darin fixiert ist die Länge des Führungsarms des zweiarmigen Hebels 5 wird durch Drehen der Führungsschraube 10 eingestellt, wodurch sich der Stift 3 in der Radiusnut 4 bewegt, während der Radiusform dieser Nut gewährleistet eine konstante Position des Hebels 5 beim Verstellen.
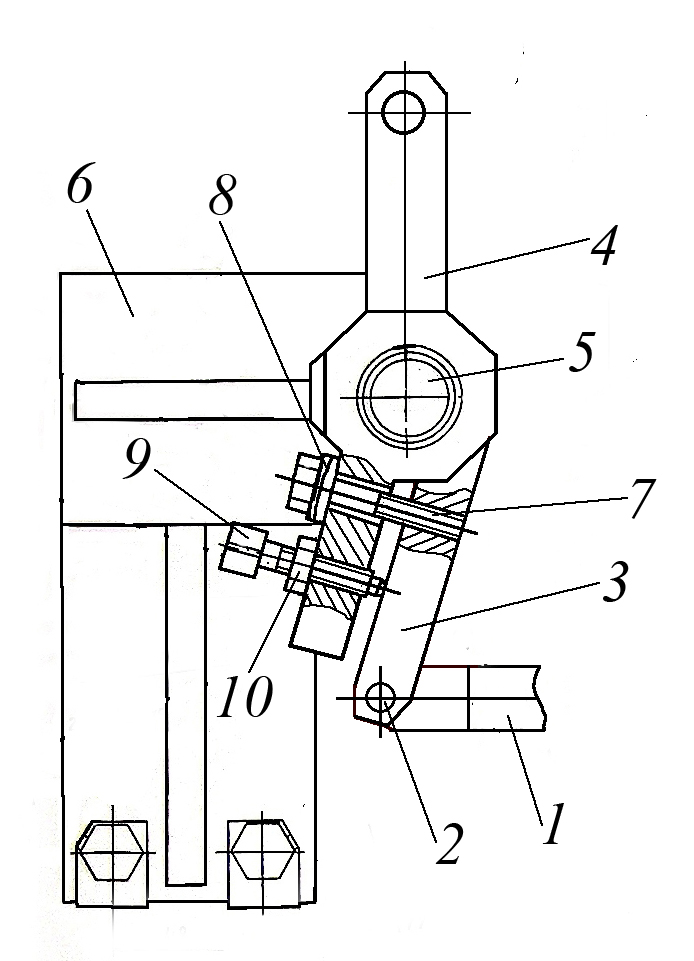 Abb. 17 Konstruktion der Vorrichtung zur Einstellung der Winkelposition des Hebels relativ zu seiner Schwenkachse.
Abb. 17 Konstruktion der Vorrichtung zur Einstellung der Winkelposition des Hebels relativ zu seiner Schwenkachse.
Bei einer Reihe von Betätigungs- und Hilfsmechanismen von technischen Geräten wird es erforderlich, die Anfangsposition des Abtriebsglieds einzustellen, was durch Einstellen der Winkelposition des Hebels erreicht werden kann, unabhängig davon, ob es sich um das Abtriebs- oder Zwischenglied handelt Mechanismus. Fig. 17 stellt den Aufbau der Vorrichtung zum Einstellen der Winkelposition des Hebels relativ zu seiner Schwenkachse dar. Sie enthält eine Führungsstange 1, die schwenkbar mit dem Führungskipphebel 3 mittels einer Achse 2 verbunden ist, die, wie die angetriebene zweiarmige Hebel 4, ist schwenkbar an einem Stift 5 befestigt, der an einer Halterung 6 befestigt ist. Gleichzeitig sind der Kipphebel 3 und der zweiarmige Hebel 4 mittels eines daran befestigten Bolzens 7 starr miteinander verbunden der Hebel 4 unter Verwendung eines Satzes Kugelscheiben 8 und einer Anschlagschraube 9, deren axiale Position im Hebel 4 durch eine Mutter 10 fixiert ist. Eine solche Verbindung des Hebels 4 und der Kulisse 3 mit der Position der letzteren unverändert, ermöglicht es Ihnen, die Winkelposition des Hebels zu ändern
ha 4, was durch Ein- und Ausschrauben des Bolzens 7 und der Schraube 9 erfolgt.
Diese Einstellung ermöglicht es Ihnen jedoch, die Position des Hebels in einem engen Bereich einzustellen. Ein großer Einstellbereich der Winkelposition des Hebels kann durch Einstellen der Länge der Antriebsstange erreicht werden, was durch bekannte Verfahren durchgeführt wird.
Kipphebel
Kipphebel sind, wie bereits erwähnt, eine der Hebelarten und werden auch in Hebelmechanismen häufig verwendet. Sie werden in Fällen verwendet, in denen es erforderlich ist, ohne die Bewegungsrichtung zu ändern, ihre Größe zu ändern oder ein komplexeres Bewegungsgesetz des führenden Glieds des Hebelmechanismus zu erhalten. Auf Abb. 18 zeigt mehrere Optionen zur Verwendung von Kipphebeln als Teil von Hebelmechanismen. Auf Abb. Fig. 18a zeigt ein kinematisches Diagramm des Hebelgetriebes, dessen Wippe das treibende Pleuel gelenkig mit dem getriebenen Pleuel verbindet, während der Hub des Schiebers vergrößert wird. Auf Abb. 18b, c, d zeigt ein kinematisches Diagramm des Hebelmechanismus, der eine zwischengeschaltete und angetriebene Wippe enthält, während das Vorhandensein einer zwischengeschalteten Wippe es Ihnen ermöglicht, das erforderliche Bewegungsgesetz der angetriebenen Wippe zu erhalten. Auf Abb. 18b, in der beide Kipphebel schwenkbar mit der angetriebenen Pleuelstange des Verbindungsmechanismus verbunden sind, und in Fig. In Fig. 18g ist die Zwischenschwinge gleichzeitig mit der antreibenden und der angetriebenen Pleuelstange verbunden, und die angetriebene Schwinge ist mit der angetriebenen Pleuelstange verbunden.
.
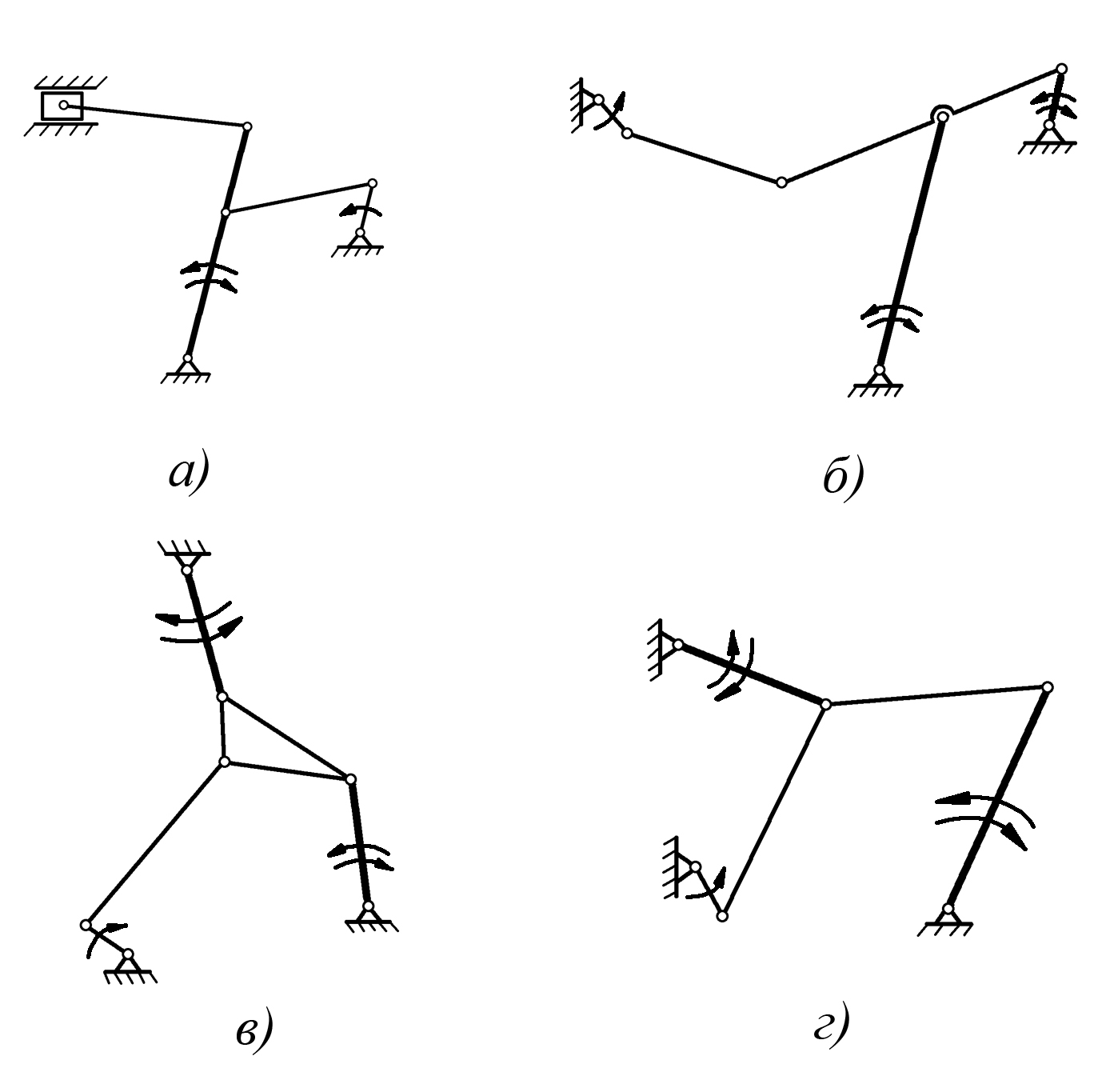 Reis. 18. Kinematische Diagramme von Hebelmechanismen enthalten
Reis. 18. Kinematische Diagramme von Hebelmechanismen enthalten
Kipphebel.
Auf Abb. Fig. 19 zeigt den Aufbau eines Wagenhebers auf Basis eines Hebelmechanismus, der als Haupttragelement eine Wippe enthält. Er enthält einen Stützschuh 1, der über die Achse 2 schwenkbar mit dem Stützbalken 3 verbunden ist, und letzterer über die Achse 5 schwenkbar mit der Verbindungsstange 4 verbunden ist, die über die Verbindungsstange 9 schwenkbar verbunden ist Achse 8. Außerdem ist der Stützbalken 3 schwenkbar mit der Verbindungsstange 6 verbunden, und letztere wiederum ist über die Achse 10 mit der Verbindungsstange 9 und über die Achse 11 mit dem oberen Stützschuh 12 verbunden der Wagenheber. In diesem Fall sind die Achsen 7 und 8 durch die Führungsschraube 14 mit dem Griff 15 verbunden, der mit der Achse 8 mittels einer Gewindeverbindung in Kontakt steht, und mit der Achse 7 durch ein glattes Loch und eine Schulter 13. In in diesem Fall bilden die gelenkigen Verbindungen des Kipphebels 3 und der Verbindungsstangen 4, 6 und 9 untereinander den Parallelogrammmechanismus, der zusammen mit der Verbindung der Achsen 7 und 8 mittels der Leitspindel 14 dies ermöglicht um einen Kraftgewinn zu erzielen und stellt die parallele Bewegung des Schuhs 12 sicher, wenn er angehoben und abgesenkt wird.
Die Buchse funktioniert wie folgt. Die Drehung des Handgriffs 15 zusammen mit der Leitspindel 14 im Uhrzeigersinn führt zur Konvergenz der Achsen 7 und 8 in horizontaler Richtung, während die Schwinge 3 entgegen dem Uhrzeigersinn dreht, bewegt die Verbindungsstangen 9 und 10 derart, dass der obere Stützschuh 12 steigt zusammen mit der angehobenen Last auf. Wenn der Griff 15 mit der Leitspindel 14 in die entgegengesetzte Richtung gedreht wird, laufen die Achsen 7 und 8 in horizontaler Richtung auseinander, der Kipphebel 3 dreht sich im Uhrzeigersinn und die Verbindungsstangen 9 und 10 bewegen sich entsprechend und bewegen den Stützschuh 12 zusammen mit der zuvor angehobenen Last nach unten.
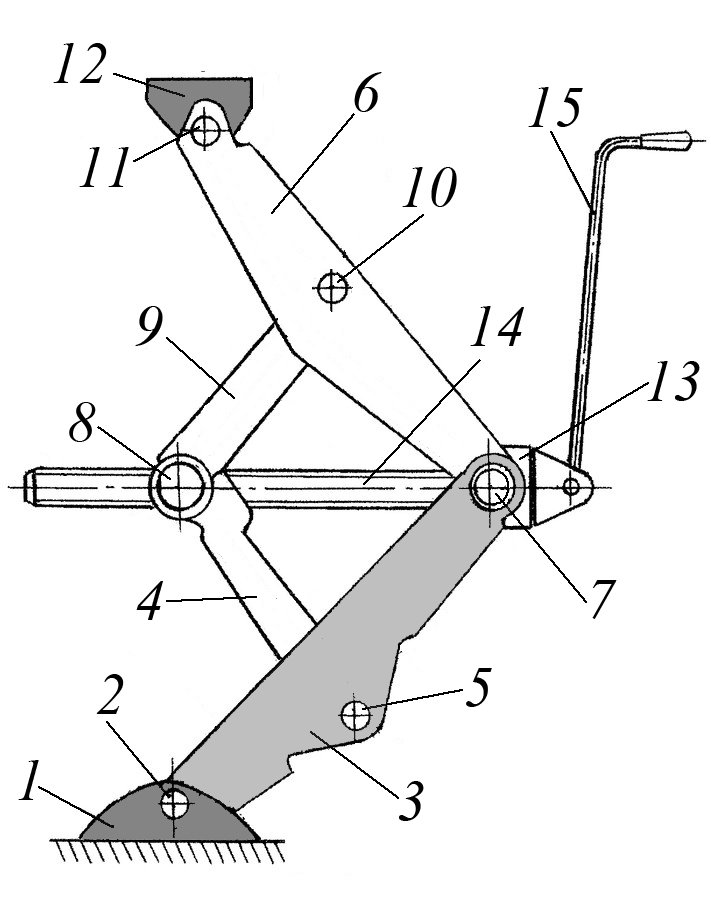 Reis. 19. Das Design des Wagenhebers auf der Grundlage
Reis. 19. Das Design des Wagenhebers auf der Grundlage
Hebelmechanismus.
Bei der Montage mehrerer Kipphebel an einer Achse, die auf einer Zahnstange montiert ist, können diese starr auf dieser montiert werden, während die Achse selbst mittels Lagern auf dem Rahmen platziert werden kann. Auf Abb. Fig. 20 zeigt die Konstruktion der Traktorbremssteuereinheit, die auf der Basis mehrerer Kipphebel ausgeführt ist, die sich auf einer gemeinsamen Achse befinden und mittels Halterungen am Rahmen montiert sind. Die Steuereinheit der Traktorhebel enthält eine Achse 2, die mittels Gelenklagern 9 in den auf einer festen Basis befestigten Halterungen 1 installiert ist, auf deren verzahnter Oberfläche die angetriebenen Flügel 3 und 4 starr befestigt sind, sowie eine Verzahnung schwenkbar gelagert ist der Sektor 6 mit einer mit ihm schwenkbar verbundenen Sperrklinke 12 sowie das Treibglied 5. Die axiale Fixierung der auf der Achse 2 gelagerten Teile erfolgt mittels des Sicherungsrings 7 und der Originalmutter Die Kugelgelenke 9 sind innen mit Manschetten 8 und außen mit in die Gehäuse 1 eingepressten Deckeln 10 verschlossen. Antriebslenker 5 und Abtriebslenker 4 sind über Gelenklager mit den entsprechenden Steuerstangen verbunden 13.
Das Bremssteuergerät arbeitet wie folgt. Wenn das Antriebsglied 5 im Uhrzeigersinn gedreht wird, bewegt sich die Sperrklinke 12 entlang eines Bogens, wobei ihr spitzes Ende eine bestimmte Anzahl von Zähnen auf dem Zahnradsektor 6 erfasst, während die Achse 2 zusammen mit den angetriebenen Kipphebeln 3 und 4, sowie der Zahnradsektor 6 bleibt stationär. Wenn das Antriebsglied 5 im Gegenuhrzeigersinn gedreht wird, liegt die Sperrklinke mit ihrem spitzen Ende an dem entsprechenden Zahn des Sektors 6 an und bewirkt so, dass es sich zusammen mit der Achse 2 und den angetriebenen Kipphebeln 3 und 4 in die gleiche Richtung wie a dreht infolgedessen bewegen letztere die Bremssteuerstangen (in Fig. 20 nicht gezeigt).
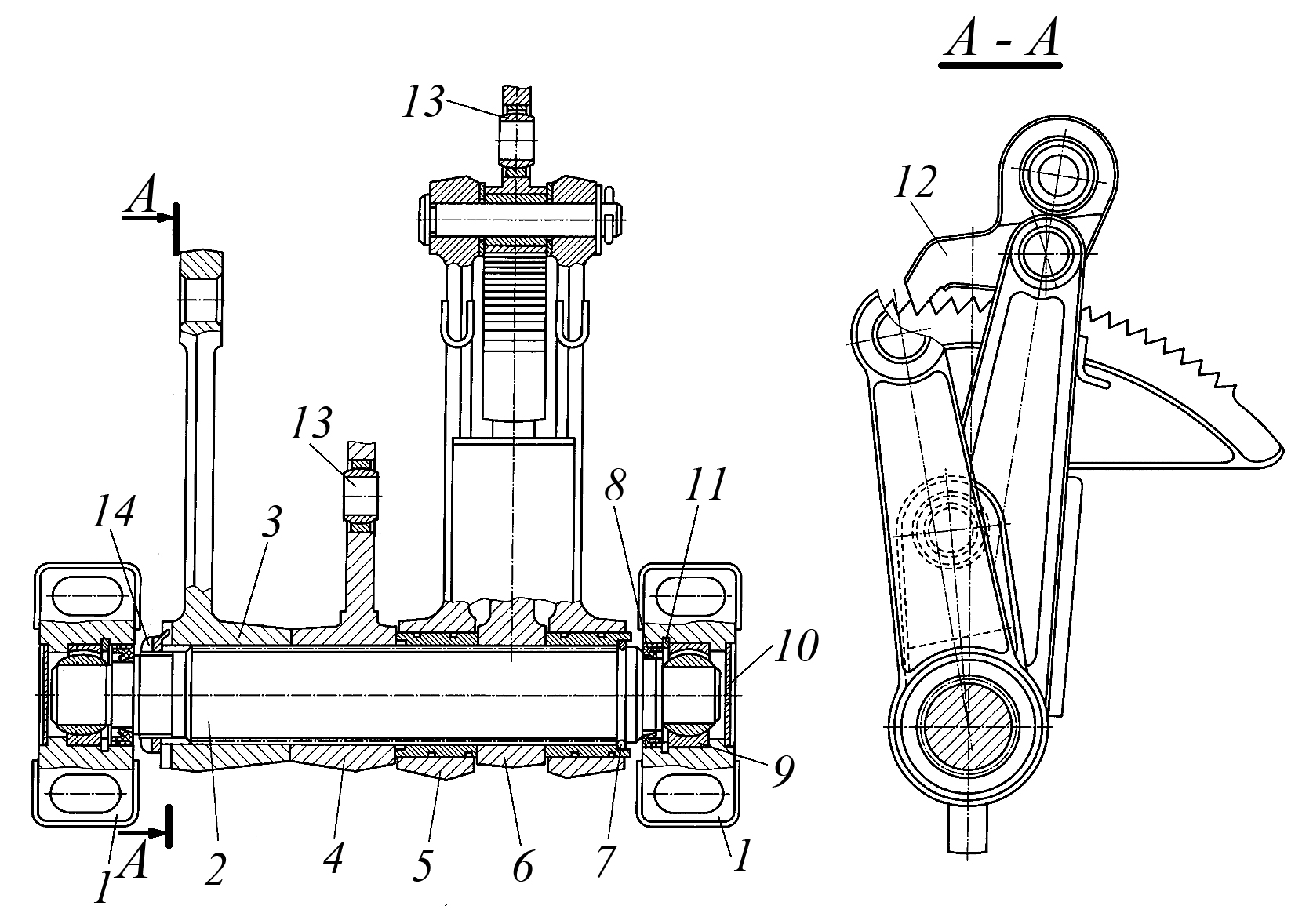 Reis. 20. Das Design des Traktorbremssteuergeräts, das hergestellt wird
Reis. 20. Das Design des Traktorbremssteuergeräts, das hergestellt wird
basiert auf mehreren Kipphebeln, die auf einer gemeinsamen Achse liegen.
Die Zusammensetzung der Kipphebel sowie die Zusammensetzung der Hebel können Vorrichtungen umfassen, die die Fähigkeiten der Hebelmechanismen erweitern, die diese Hebel umfassen. Meistens handelt es sich dabei um Geräte, die den Kipphebel oder seine Position verändern. Auf Abb. Fig. 21 zeigt die Ausführung der Wippe mit einstellbarem Abstand von Drehachse zu Wippenschwenkachse. Diese Wippe 1 ist mit Querschlitzen ausgeführt v
Schritt für Schritt T
und Längsnut A
, in dem Stift 4 mit Bund eingebaut ist B
und zwei Gewindeenden, während am Ende der Stift in die Längsnut geführt wird A
installiert sind eine Zwischenscheibe 2, eine Stützscheibe 3 und eine Mutter 5. In der Zwischenscheibe 2 ist eine Längsnut angebracht, deren Länge L
wird durch folgende Formel bestimmt: L = d + 2T/(T-t)t
Zusätzlich sind Schlitze an der Zwischenscheibe 2 von der Seite ihres Kontakts mit dem Kipphebel 1 angebracht G
Schritt für Schritt T
gegenseitige Schlitze auf der Wippe und auf der gegenüberliegenden Oberfläche der Zwischenscheibe sind 2 Schlitze hergestellt D
Schritt für Schritt T
, die mit Gegenverzahnungen in Kontakt stehen e
auf der Stützscheibe 3. Im unteren Teil der Wippe ist ein Loch 6 angebracht, in das die entsprechende Drehachse der Wippe mit der festen Zahnstange eingebaut wird. Grobe Abstandseinstellung R
von der Schwenkachse zur Schwenkachse der Schwinge erfolgt durch Verschieben der Zwischenscheibe 2 in der Längsnut A
Kipphebel und Feineinstellung - durch Längsverschiebung der Stützscheibe 3 relativ zur Zwischenscheibe 2 aufgrund des Vorhandenseins einer Längsnut darin. In diesem Fall wird der Anpassungswert nach folgender Formel bestimmt:
????R = n1T – n2t;
Wo:
– n1
, die Anzahl der Zähne, um die die Zwischenscheibe 2 verschoben wird,
– n2
, die Anzahl der Zähne, um die die Stützscheibe verschoben wird 3.
Zur bequemen Einstellung der Position des Fingers 4 kann an der Wippe 1 eine Skala mit den entsprechenden Teilungen angebracht werden.
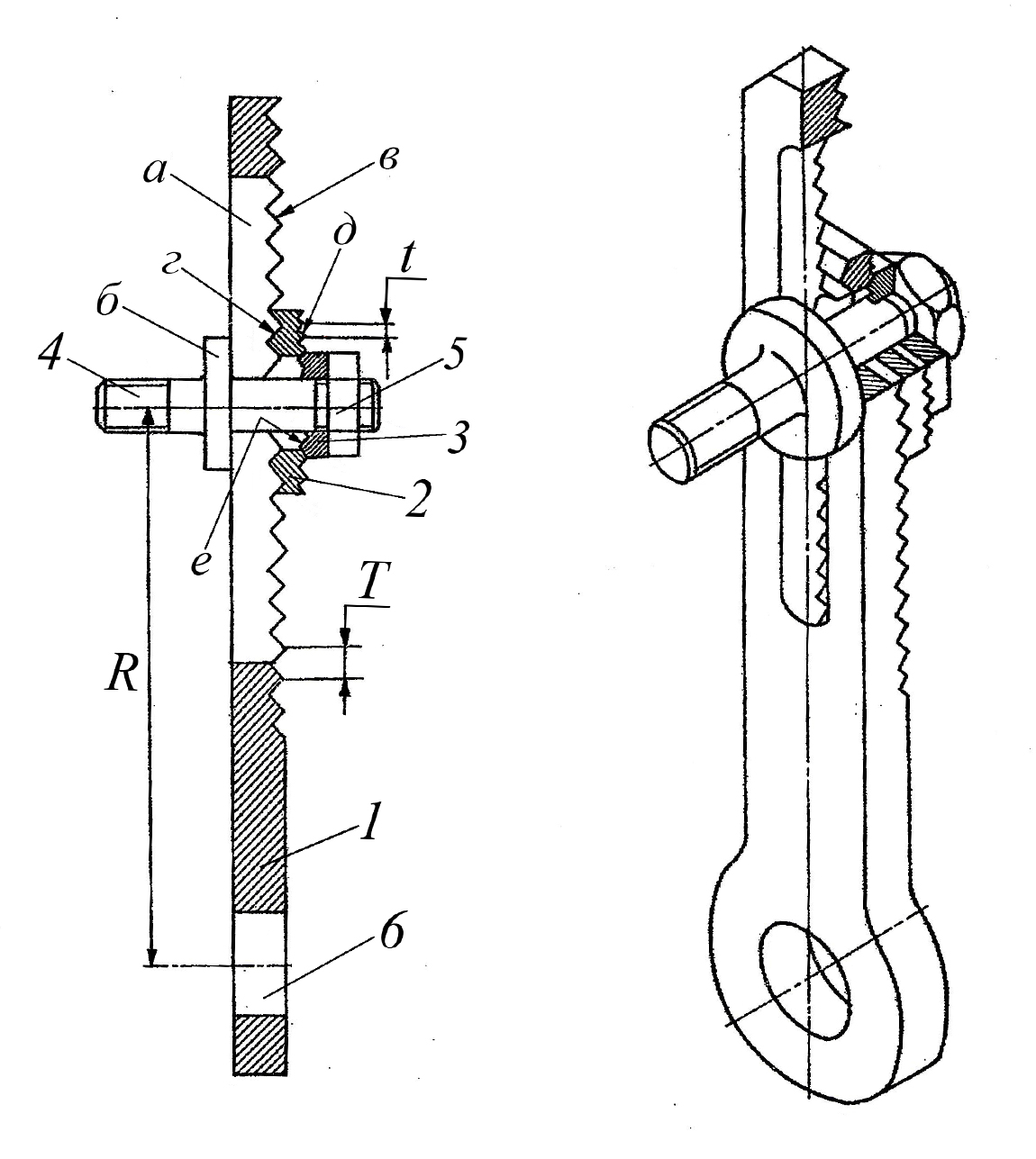 Reis. 21. Kipphebeldesign mit einstellbarem Abstand
Reis. 21. Kipphebeldesign mit einstellbarem Abstand
von der Schwenkachse zur Kipphebelschwenkachse.
Bei einigen Hebelmechanismen wird die Winkelposition der Wippe durch Drehen der Achse ihrer Schwingung gesteuert. Auf Abb. 22 zeigt die Konstruktion der Schwingachse der Wippe, mit der Sie ihre Position einstellen können. Um die Position der Wippe zu regulieren, ist ihre Schwenkachse 2, die in den Löchern der Zahnstange 1 befestigt ist, mit einem exzentrischen Hals 3 versehen, auf dem eine exzentrische Hülse 5 mit einer äußeren sphärischen Oberfläche in Kontakt mit der Gegenfläche von installiert ist die Wippe 6. Gleichzeitig wird eine Unterlegscheibe auf das Gewindeende der Achse 2 und eine Mutter zu ihrer axialen Fixierung montiert, und der an seinem gegenüberliegenden Ende befindliche Achskopf ist in Form eines Polyeders mit jeder Fläche ausgeführt die bei einer bestimmten Winkelposition der Achse 2 die Passfläche 7 berühren kann, die in Form eines Vorsprungs an der Zahnstange 1 hergestellt ist. Zum Einstellen der Position der Kippachse des Kipphebels 6 Achse 2 und Exzenterhülse 5 gedreht werden, die in gleicher oder unterschiedlicher Richtung ausgeführt werden können.
 Reis. 22. Die Gestaltung der Schwingachse der Wippe, zulassend
Reis. 22. Die Gestaltung der Schwingachse der Wippe, zulassend
seine Position regulieren.
Auf Abb. 23 zeigt das Design eines in die Wippe eingebauten Geräts, mit dem Sie seine Winkelposition relativ zur Achse, auf der es installiert ist, stufenlos einstellen können. Diese in den Kipphebel 1 eingebaute Vorrichtung, die mittels der Achse 2 schwenkbar mit der Antriebsstange des Hebelmechanismus verbunden ist, besteht aus einem Schneckenrad 3, das sich in der Bohrung des Kipphebels befindet und mit seiner Innenverzahnung 4 kontaktiert die keilverzahnte Oberfläche der Achse 14 und greift auch in die Schnecke 5 ein, die in der Bohrung des Kipphebels installiert ist, die senkrecht zur Achse des Schneckenrads ausgeführt ist. Gleichzeitig steht der rechte Zapfen der Schnecke 5 mit einem Sechskantende 6 im Deckel 10 über einen Rollensatz 9 mit der Buchse 8, an deren linkem Ende konische Zähne 7 aufgebracht sind, in Kontakt die an der Schnecke 5 hergestellten Eingriffszähne bilden einen Eingriff. Das linke Ende der Schnecke 5 mit einem zentralen konischen Loch berührt die Gegenfläche der elastischen Unterlegscheibe 12, die durch die Feder 11 und die Abdeckung 13 gedrückt wird.
Die Einstellung der Winkelposition des Kipphebels 1 relativ zur Achse 14 wird wie folgt durchgeführt. Um den Kipphebel 1 in die eine oder andere Richtung zu drehen, wird die Schnecke 5 für den Sechskantkopf 6 mit einem Schraubenschlüssel in die gewünschte Richtung gedreht, während ihre Drehung auf das Schneckenrad 3 übertragen wird, das mittels eines Keils befestigt ist Verbindung auf der Welle 14, bleibt stationär und der Kipphebel 1 dreht sich in die gewünschte Richtung Seite, wobei er seine Winkelposition relativ zur Achse 14 ändert.
Reis. 23. Wippe mit eingebauter Vorrichtung zum Einstellen
Winkelposition.
LITERATUR.
1. Ignatiev N. P. Grundlagen der Gestaltung von Asow 2011.
2. Ignatiev N. P. "Design von Mechanismen" Azov 2015
Der Artikel verwendet Informationen aus den relevanten Abschnitten der Arbeit des Autors " Gestaltungsgrundlagen» erschienen 2011 und die Arbeit des Autors "Design von Mechanismen" 2015 erschienen
In einem Nachschlagewerk "Design von Mechanismen" Neben Beispielen für die Gestaltung von Hebeln und Kipphebeln enthält es:
– Konstruktionsbeispiele und Empfehlungen für den Einsatz von Kurvengetrieben, Aussetzwerken und Kombigetrieben,
- Konstruktionsbeispiele und Empfehlungen für die Verwendung der Haupttypen von Teilen der oben genannten Mechanismen: Kurbelwellen, Pleuelstangen, Schieber, Nocken und ihre Drehgelenke,
- Empfehlungen für die Auswahl des Antriebstyps und Beispiele für seine Implementierung,
– Berechnungen von Mechanismen,
- ein Beispiel für die Erstellung eines Zyklogramms des Betriebs eines Nockenautomaten,
– Technik zum Entwerfen von Mechanismen,
– Empfehlungen für die Zuordnung von Genauigkeitsanforderungen zu Mechanismen und ihren typischen Teilen,
– ein Beispiel für die Konstruktion eines Mechanismus
Um die Vollversion des Artikels zu kaufen, fügen Sie ihn dem Warenkorb hinzu,
Die Kosten für die Vollversion des Artikels betragen 50 Rubel.