Beginnen wir mit der Bedeutung dieses Fachbegriffs aus der Automobilbranche in einer für den Durchschnittsbürger verständlichen Sprache. Ein Automobildifferenzial ist das, was das Getriebe ausmacht und es ermöglicht, dass sich die Räder asynchron drehen, d. h. jedes Rad ist unabhängig voneinander und dreht sich separat.
Wissenschaftlich ausgedrückt ist ein Autodifferential (von lat. differentia – Unterschied, Unterschied) ein Gerät, das die der Eingangswelle zugeführte eingehende Energie (Drehmoment) auf die Ausgangswellen aufteilt. Eine einfache und verständliche Erklärung erweitert den Horizont. Mädchen interessieren sich auch für die Arbeit maschineller Mechanismen.
Grund für die Verwendung in Autodesigns
Während der Kurve des Autos drehen sich die Antriebsräder mit der gleichen Geschwindigkeit, und wenn ein Rad des Autos eine lange Kurve und das andere eine kurze Kurve macht, entsteht Schlupf, der sich negativ auswirkt und damit einhergeht durch Reifenverschleiß und führt zu Unannehmlichkeiten für den Fahrer aufgrund einer Verschlechterung der Fahrdynamik.
Zweck des Differentials
- ermöglicht es den Antriebsrädern, sich mit unterschiedlichen Winkelgeschwindigkeiten zu drehen
- dient als separates Zusatzgetriebe gepaart mit dem Hauptgetriebe. Das Hauptgetriebe ist ein Getriebemechanismus eines Autogetriebes, das Drehmoment auf die Antriebsräder überträgt.
- überträgt kontinuierlich Drehmoment vom Motor auf die Antriebsräder.
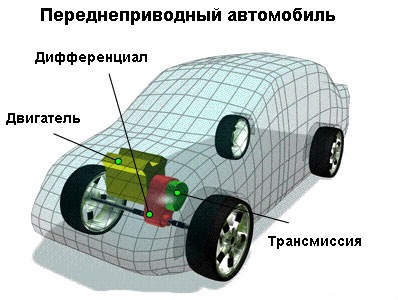 Bei Fahrzeugen mit Frontantrieb sind Hauptzahnrad und Differenzial direkt im Getriebe untergebracht.
Bei Fahrzeugen mit Frontantrieb sind Hauptzahnrad und Differenzial direkt im Getriebe untergebracht.
Wenn mehr als ein Motor im Fahrzeug eingebaut ist, ein Motor pro Rad, ist das Differenzial nicht erforderlich. Aber das tun sie normalerweise nicht. Installieren Sie 4 Motoren, einen für jedes Rad, nur bei Belaz-Muldenkippern. Diese Motoren sind elektrisch.
Bei Rennkarts ist auch kein Differenzial verbaut, da die Rahmenkonstruktion flexibel ist, was ein leichtes Anheben des hinteren Antriebsrads von der Kurveninnenseite aus ermöglicht, ohne die Vorderräder anzuheben.
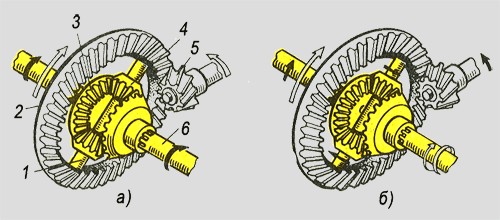
in Abbildung a) - die Räder drehen sich mit der gleichen Frequenz, in Abbildung b) - die Bewegung der Räder in einer Kurve
1 - Satellitenachse, 2 - angetriebenes Zahnrad, 3 - Seitenräder, 4 - Satellit,
5 - Antriebsrad, 6 - Achswellen.
Bei Rennwagen sind Differenzial-Rallyes in der Regel verschweißt, fest blockiert und fest mit den Rädern der Antriebsachse verbunden. Dies wird verwendet, weil solche Autos beim Fahren alle Kurven mit Schleudern passieren.
Wie das Differential funktioniert
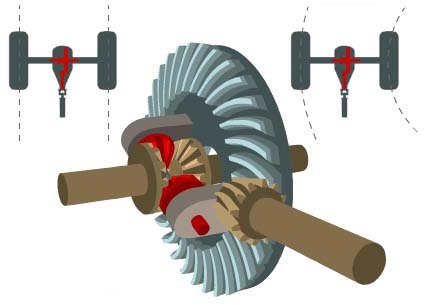
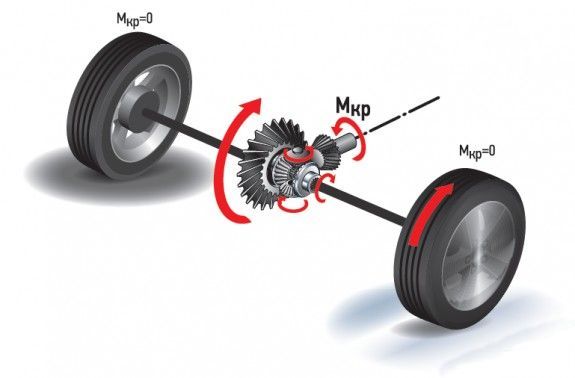
Funktionsprinzip. Das Hauptzahnrad überträgt Torsionsenergie über das Zahnrad auf das Gehäuse und die Satelliten, die mit den Zahnrädern der Achswellen in Eingriff stehen.
Bei gleicher Drehgeschwindigkeit der Räder bleiben die Satelliten bewegungslos (siehe Bilder unten).
Wenn sich die Winkelgeschwindigkeiten der Räder ändern, beispielsweise beim Wenden oder Rutschen aufgrund unebener Straßen usw., drehen sich die Satelliten. Um den Unterschied in den Radgeschwindigkeiten auszugleichen, werden Satelliten eingesetzt.
Betrachten Sie ein Beispiel: Ein Auto rutscht auf Eis aus. Hier rutscht ein Rad, weil es keinen Halt auf dem Eis gibt und somit kein Drehmoment vorhanden ist. Und da die freie Blockiervorrichtung die Traktion gleichmäßig auf die Räder verteilt, verschwindet das Drehmoment, wenn an einem Rad kein Drehmoment vorhanden ist, am zweiten.
Der Ausweg aus dieser Situation besteht darin, am gegenüberliegenden Rad eine Gegenkraft zu erzeugen. Und genau das bewirkt das Blockieren. Es ist notwendig, das durchrutschende Gegenrad zu blockieren, dann entsteht eine Gegenkraft für das Gegenrad.
Wie ein Differential bei einem Fahrzeug mit Allradantrieb funktioniert
Wenn bei Jeeps, Limousinen, Schrägheckmodellen und Kombis 4x4 ein freies symmetrisches Differenzial eingebaut ist, tritt die folgende Situation auf. Bei schlupffreiem Fahren werden 25 % der Drehmomentenergie gleichmäßig auf jedes Rad verteilt.
 Wenn jedoch ein Rad durchrutscht, beispielsweise auf Eis, wird die Torsionsenergie auf Null reduziert, da das Rad nicht auf der glatten Eisoberfläche greifen kann. Wenn in einer solchen Situation ein Rad ohne Drehung bleibt, verschwindet die Rotationsenergie am gegenüberliegenden Nachbarrad, da in diesem Beispiel eine symmetrische Mittelachse eingebaut ist.
Wenn jedoch ein Rad durchrutscht, beispielsweise auf Eis, wird die Torsionsenergie auf Null reduziert, da das Rad nicht auf der glatten Eisoberfläche greifen kann. Wenn in einer solchen Situation ein Rad ohne Drehung bleibt, verschwindet die Rotationsenergie am gegenüberliegenden Nachbarrad, da in diesem Beispiel eine symmetrische Mittelachse eingebaut ist.
Es stellt sich heraus, dass eine Achse ohne Drehung blieb und daher auch das Drehmoment auf der zweiten Achse verschwindet, da die Differenzmittelachse symmetrisch ist. Die Folge ist, dass sich nicht alle 4 Antriebsräder drehen.