وصف المنتج
آليات الرافعة ، الجزء 6 الروافع وأذرع الروك
في آليات الكرنك ، كارتباط خرج ، أو كارتباط وسيط ، يتم استخدام الرافعات أو أذرع الروك أو الكواليس ، والتي ، على عكس المنزلق المتحرك تدريجيًا ، تؤدي حركة هزازة بالنسبة للمحور الذي يربطها بالإطار. ومع ذلك ، عند إجراء نفس النوع من الحركة ، يمكن أن يكون للرافعات وأذرع الروك وخلف الكواليس تصميم مختلف تمامًا ، والذي يعتمد بشكل أساسي على الغرض والنطاق ، أو بالأحرى مجال التكنولوجيا الذي يتم فيه استخدام آلية الرافعة أو الكرنك ، والتي تشمل هذه الروابط.
ذراع الرافعة- هذا رابط لآلية الرافعة ، والتي ، عند تثبيتها بشكل محوري على محور ثابت ، تؤدي حركة هزازة بالنسبة لها ، بينما تتلقى محركًا في أغلب الأحيان من قضيب أو قضيب توصيل ، والذي يتم توصيله به أيضًا بشكل محوري.
الروك- هذا هو ذراع أحادي الذراع مُركب على محور ثابت ويتم تشغيله بواسطة قضيب أو قضيب توصيل.
الرافعات
تستخدم الرافعات ، في كثير من الأحيان ، مثل أعمدة الكرنك ، وقضبان التوصيل والمنزلق ، في آليات الرافعة ، لأنها لا تسمح فقط بضمان أن الآلية تفي بالغرض الوظيفي ، كونها رابط الإخراج الخاص بها ، ولكن بالإضافة إلى ذلك ، كونها وصلة وسيطة ، فهي تسمح تغيير حجم واتجاه الحركة المرسلة ، وفي بعض الحالات لنقلها إلى مستوى موازٍ أو عمودي.
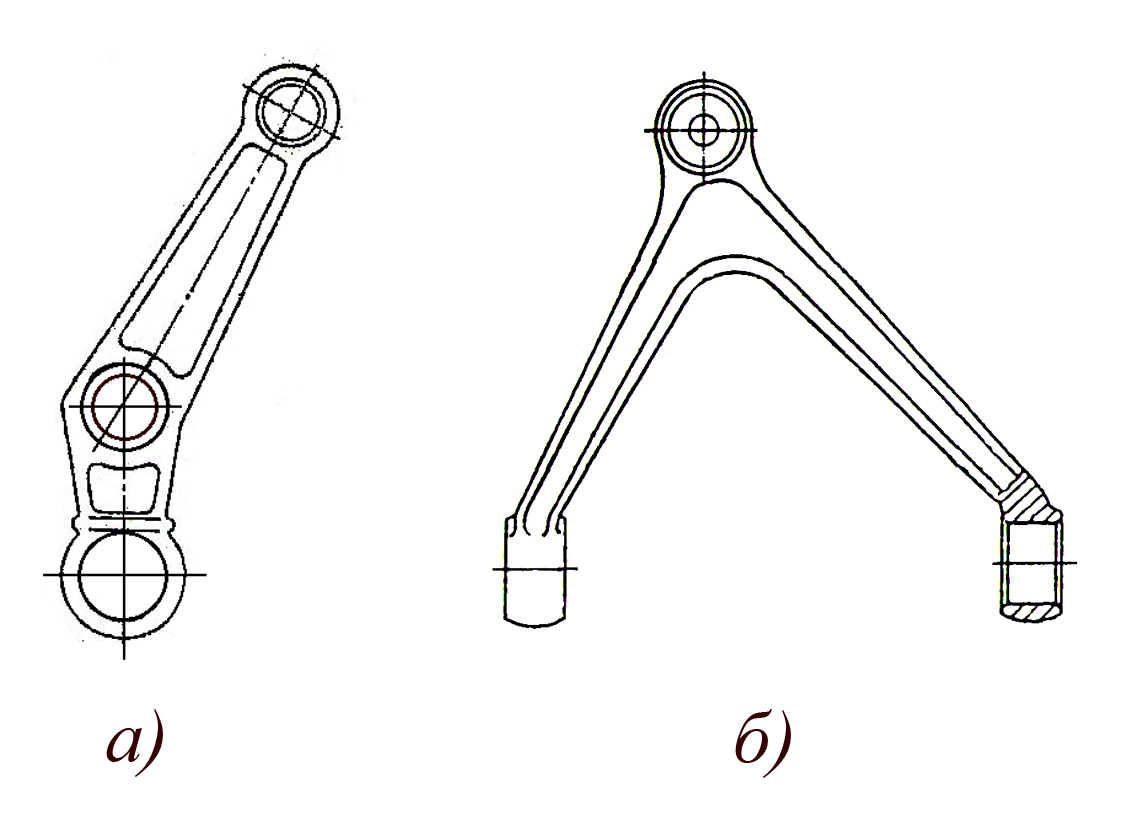
على التين. يوضح الشكل 1 تصميم أنواع مختلفة من الرافعات الأكثر استخدامًا في الهندسة الميكانيكية. على التين. 1 أيتم عرض تصميم ذراع بذراعين ، وتوجد فتحات التوصيل مع الوصلة الأمامية والموجودة على جانب واحد من محور تأرجحها. على التين. 1 بيتم عرض تصميم ذراع بذراعين ، وتوجد فتحات التوصيل التي تربطها بوصلة القيادة والوصلة المحركة على جوانب مختلفة من محور تأرجحها. على التين. 1 الخامسيتم عرض تصميم الرافعة ذات الذراعين ، حيث توجد فتحات التوصيل التي تربطها بوصلة القيادة والوصلة المحركة بزاوية مع بعضها البعض وتقع على جوانب مختلفة من محور تأرجحها. على التين. 1 جييتم عرض تصميم ذراع ثلاثي الأذرع ، حيث توجد فتحات التوصيل التي تربطها بوصلة القيادة والوصلة المحركة بزاوية مع بعضها البعض وتقع على جوانب مختلفة من محور تأرجحها. على التين. 1 ديظهر تصميم الرافعة ذات الذراعين ، وتوجد فتحات الاتصال بالوصلة الأمامية والموجودة بزاوية مع بعضها البعض وتقع على نفس الجانب من محور تأرجحها ، وتكون الأذرع الأمامية والمدفوعة صنع في شكل عنصر واحد. على التين. 1 هيظهر تصميم ذراع ثنائي الذراع لآلية رافعة محملة بشكل كبير ، حيث تنقل الأذرع المدفوعة ، الموجودة على الجانب الآخر من محور التأرجح للرافعة فيما يتعلق بمحور الفتحة في الذراع المدفوعة ، الحركة لاثنين من قضبان مدفوعة. على التين. 1 ويظهر ذراع ذو ذراعين ، حيث تصنع الأذرع الأمامية والمدفوعة الموجودة بزاوية مع بعضها البعض بثقوب ، وتقع محاورها بشكل عمودي على محور التأرجح للرافعة. على التين. 1 ويُظهر تصميم رافعة ذات ذراعين لها هيكل مسبق الصنع وتتألف من محرك وذراع متحرك مصنوع على شكل أجزاء منفصلة مثبتة بشكل صارم على العمود عن طريق وصلات طرفية مشدودة بمسامير ، في حين أن وجود عمود يوفر يسمح الإزاحة المحورية لأذرع الرافعة للرافعة بنقل الحركة في مستويات متوازية. على التين. 1 ليظهر تصميم ذراع بذراعين ، والذي له غرض مشابه للمثال السابق (إزاحة الحركة المنقولة في مستوى موازٍ) ، ولكنه مصنوع في نسخة مصبوبة وله محور مركزي ممدود في الفتحة هناك محامل متدحرجة يتم تثبيت الرافعة عليها على محور مثبت على الإطار.
أرز. 1. تصميم رافعة أكثر
يشيع استخدامها في الهندسة الميكانيكية.
الرافعات الموضحة في الشكل. 1 أ–1 جممصنوعة عن طريق اللحام ، وعادة ما تستخدم في الإنتاج الفردي والصغير. في الإنتاج الضخم وعلى نطاق واسع ، يتم عمل الرافعات عن طريق الختم أو الصب. على التين. 2 يوضح بناء الرافعات المصبوبة. على التين. 2 أذراع الزهر المستخدمة في لوحة طائرة هليكوبتر ، وفي الشكل. 2 بيستخدم ذراع الزهر في تعليق السيارة.
 أرز. 2. يلقي تصميم رافعة
أرز. 2. يلقي تصميم رافعة
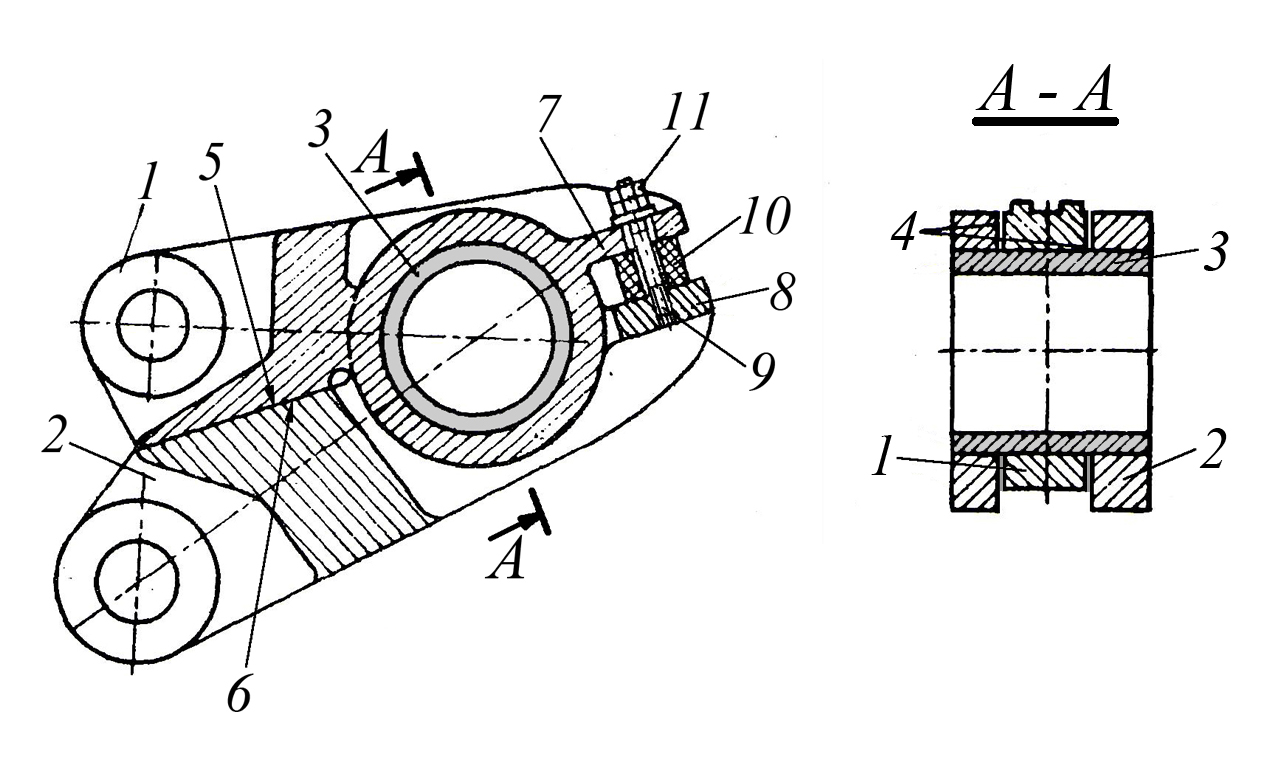
في بعض الحالات ، يتم استخدام الرافعات كارتباط وسيط يسمح لك بنقل الحركة مع إزاحة إلى مستوى موازٍ. على التين. 3 أيظهر تصميم الرافعة ، ولهذا الغرض تكون الذراعين الأمامية والمدفوعة متوازية مع بعضهما البعض ويتم إزاحتها بمسافة معينة. في هذه الحالة ، يتم تثبيت الرافعة 1 على المحامل العادية 2 بشكل محوري على المحور 3 ، ومثبتة على الجزء 4 من الجسم ، في حين أن المحورين 5 و 6 الموجودين في فتحات القيادة وذراع الرافعة المدفوعة يربطها بالروابط المقابلة لـ آلية الرافعة ، والتي تشمل الرافعة. من أجل الموقع الدقيق للرافعة 1 على المحور 3 ، يتم تثبيت حلقات الضبط 7 ، ويتم قفل الرافعة على المحور بواسطة حلقة التثبيت 8.
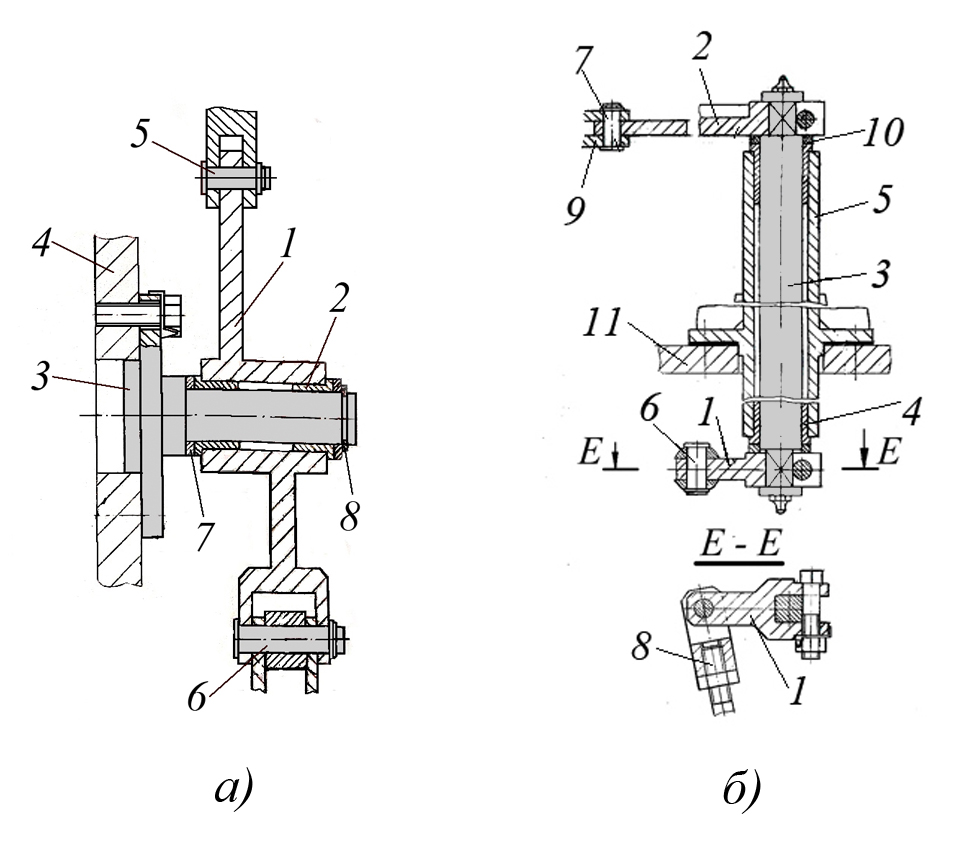 أرز. 3. تصميم العتلات التي تكون أكتافها موازية لبعضها البعض
أرز. 3. تصميم العتلات التي تكون أكتافها موازية لبعضها البعض
صديق ويتم تهجيرهم بمسافة معينة.
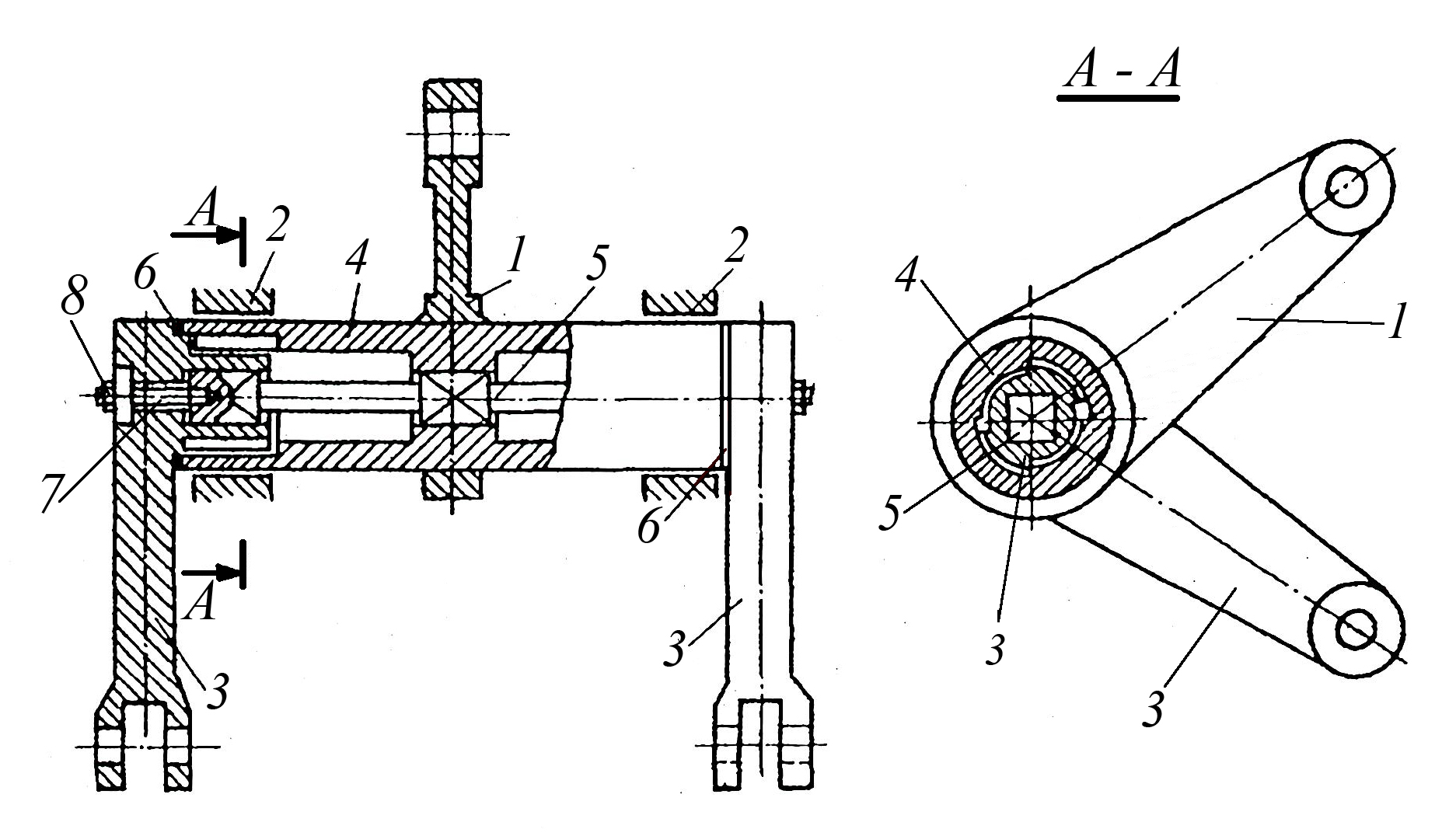
على التين. 3 بيظهر تصميم الرافعة الجاهزة ، ويتكون من الذراعين الأول والأذرع 2 ، والتي يتم تثبيتها بشكل صارم على العمود 3 عن طريق التوصيلات الطرفية. يتم تثبيت الأسطوانة 3 على المحامل 4 في فتحة القوس 5 ، مثبتة على الإطار 11 من المعدات التكنولوجية. يتم توصيل ذراع القيادة 1 للرافعة بشكل محوري بقضيب القيادة 8 من خلال المحور 6 ، والمحرك يتم توصيل الذراع 2 للرافعة بشكل محوري بالوصلة المدفوعة 9 لآلية الرافعة من خلال المحور 7. يتم توفير موضع الأسطوانة 3 بالنسبة للحامل 5 بواسطة حلقات الضبط 10.
 أرز. 4. تصميم الرافعات الجاهزة.
أرز. 4. تصميم الرافعات الجاهزة.
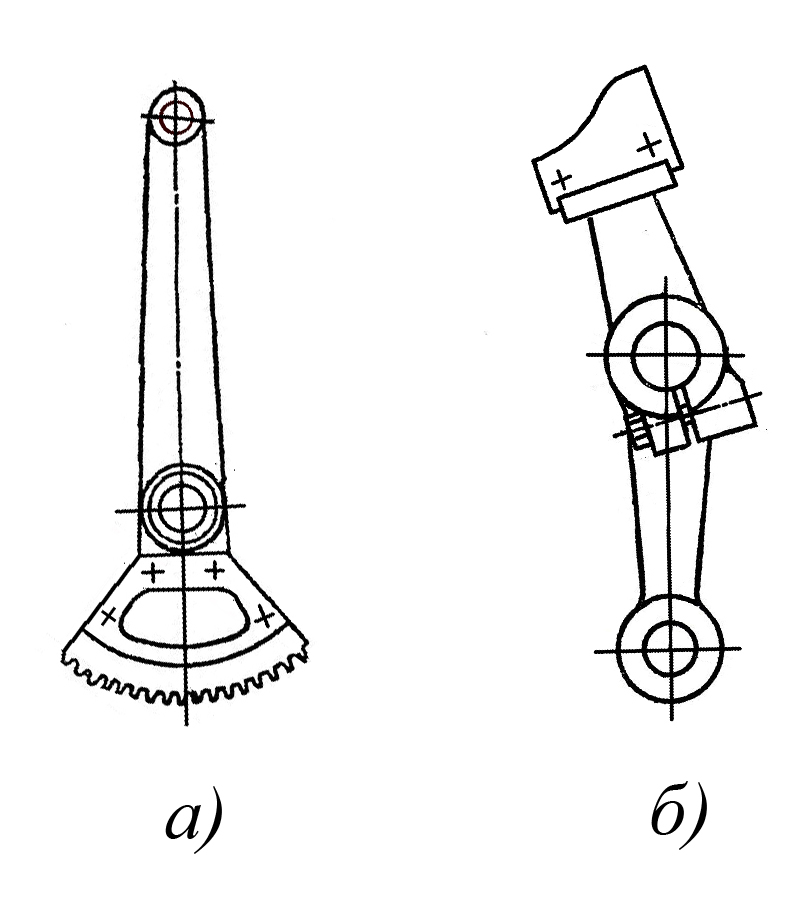
في المعدات الأوتوماتيكية ، غالبًا ما تستخدم آليات الربط جنبًا إلى جنب مع آليات التروس والكامة ، في حين أنها قد تشتمل على رافعات مسبقة الصنع. على التين. 4 يوضح خيارات التصميم لمثل هذه الرافعات. على التين. 4 أيظهر تصميم الرافعة الجاهزة المكونة من الرافعة نفسها وقطاع التروس المثبت عليها. على التين. 4 بيظهر تصميم الرافعة الجاهزة المكونة من رافعة وكاميرا مسطحة مثبتة عليها. في كلتا الحالتين ، من أجل تثبيت موثوق ودقيق لكل من قطاع التروس والكاميرا ، يتم توفير أسطح التمركز وتحديد الموقع المقابلة في الرافعة.
 أرز. 5. تصميم الرافعات المستخدمة في تركيبات الآلات.
أرز. 5. تصميم الرافعات المستخدمة في تركيبات الآلات.
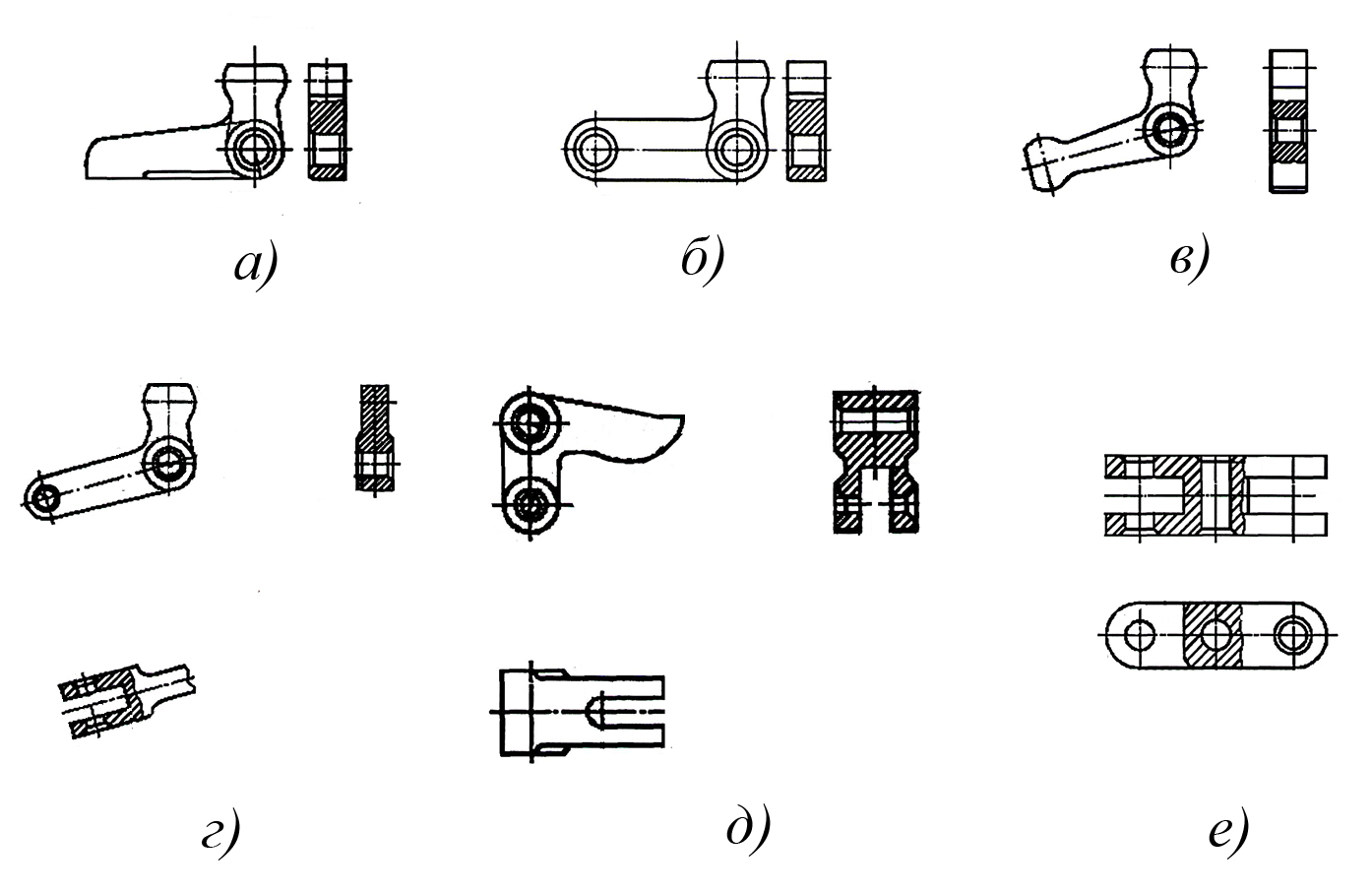
تستخدم الرافعات ذات التصميمات المختلفة على نطاق واسع في تركيبات الآلات. على التين. 5 يظهر خيارات لتصميمات الرافعة القياسية المستخدمة في تركيبات الآلات:
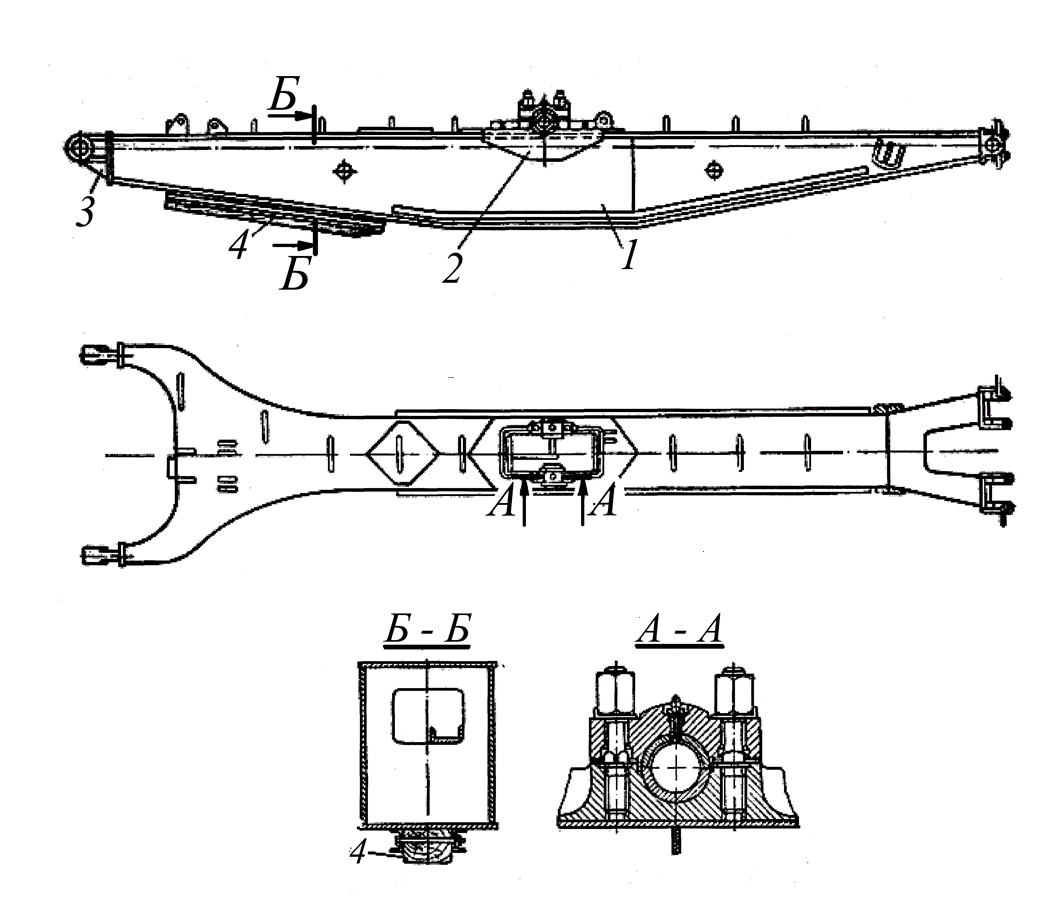
تُستخدم آليات الرافعة على نطاق واسع في معدات البناء والطرق (الرافعات والحفارات والجرافات) ، وفي هذه الحالة ، فإن الرافعات المضمنة في تكوينها لها أبعاد شاملة من عدة أمتار إلى عشرات الأمتار ، وبالتالي يتم تصنيعها عن طريق اللحام. على التين. يوضح الشكل 6 تصميم ذراع الحفر الملحوم ، والذي يتكون من شعاع 1 ، قوس 2 لتثبيت عمود محمل السرج ، وامتصاص الصدمات 3 والكعب 4.
 أرز. 7. الإنشاءات من المطاط والمعدن
أرز. 7. الإنشاءات من المطاط والمعدن
مفاصل دوارة.
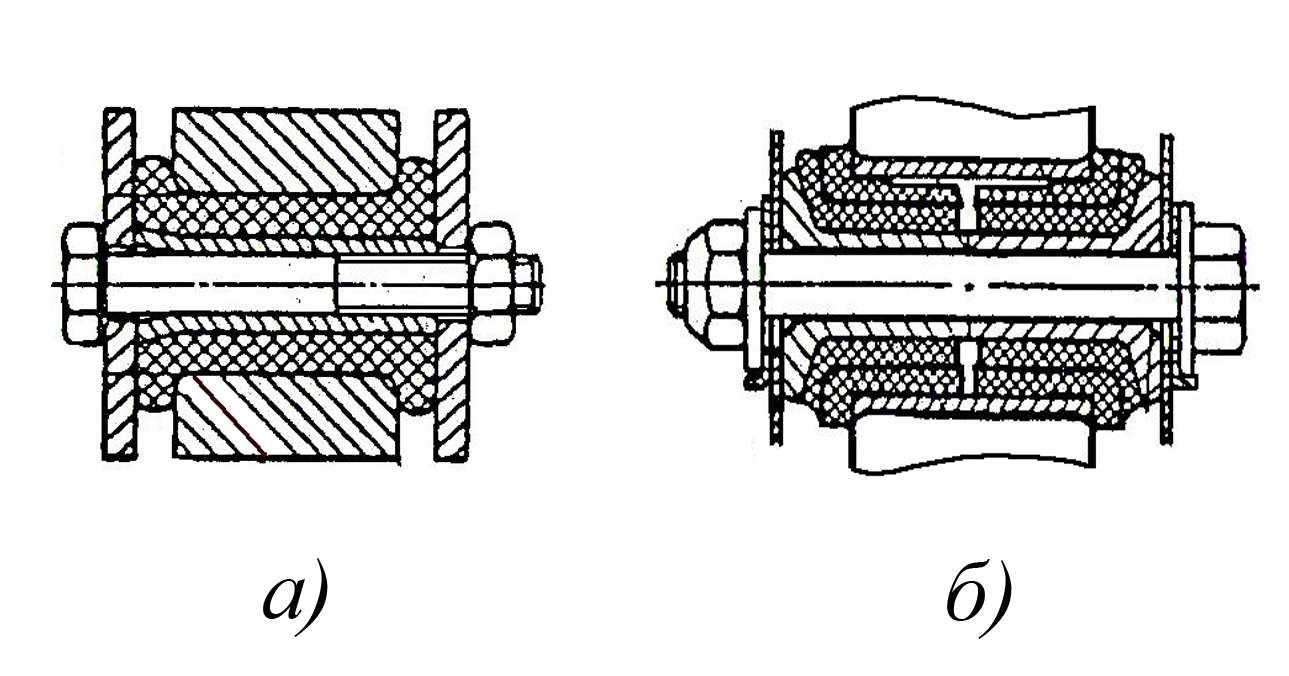
تستخدم الوصلات الدوارة للرافعات مع قضبان التوصيل والقضبان محامل عادية ومتدحرجة ، ومحامل إبرة ، ومفاصل كروية أصلية وقياسية ، وتتم مناقشة تصميماتها في مقالة "وصلات دوارة". في عدد من الحالات ، لا تختبر الوصلات الدوارة للرافعات مع قضيب أو قضيب توصيل قوى عرضية فحسب ، بل تعمل أيضًا في الالتواء ، والذي يحدث ، على سبيل المثال ، في الوصلات الدوارة للرافعات ذات القضبان في تعليق السيارة. في هذه الحالات ، يتم استخدام وصلات المطاط إلى المعدن (انظر الشكل 7).
 أرز. 8. خيارات لتركيب الرافعات على العمود.
أرز. 8. خيارات لتركيب الرافعات على العمود.
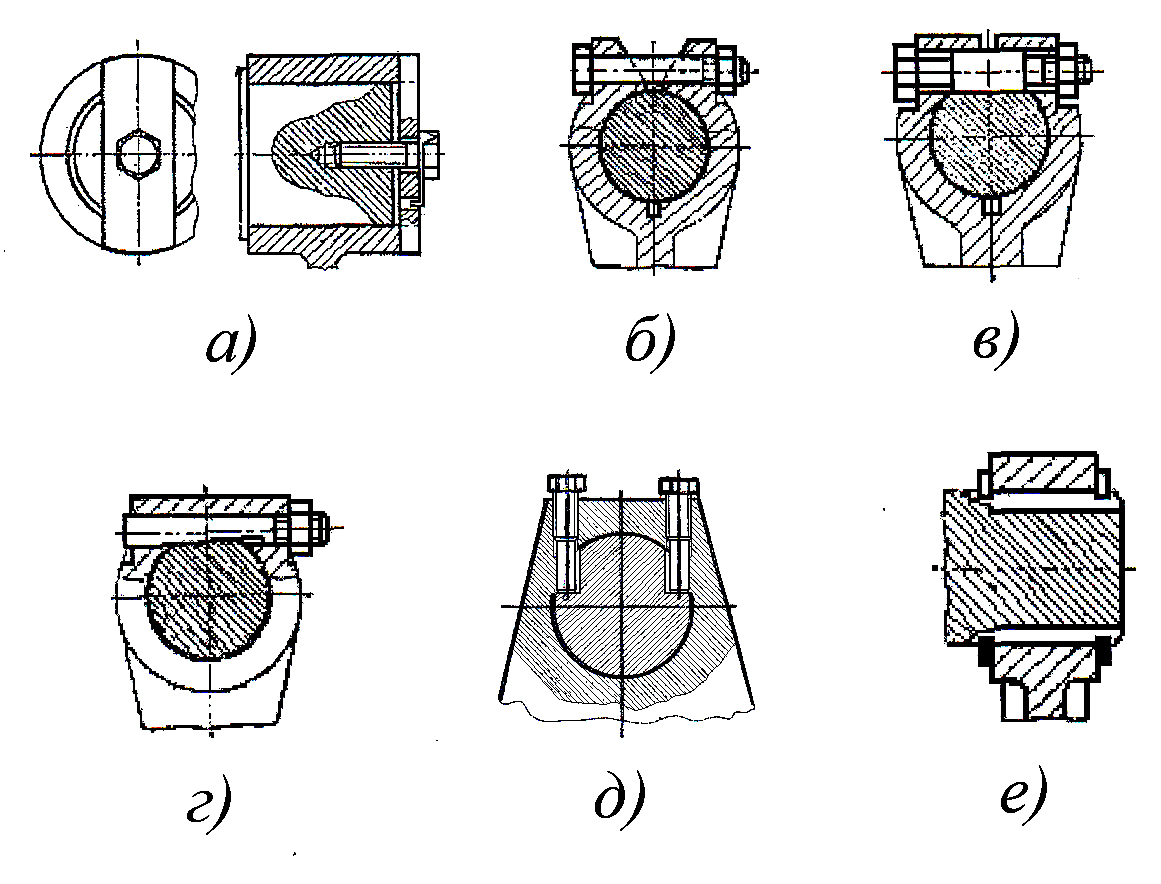
عنصر مهم لا يحدد إلى حد كبير مورد آلية الرافعة فحسب ، بل غالبًا ما يكون أداءه هو اتصال الرافعة بالعمود. , يحيل عزم الدوران إليها. يجب أن يضمن هذا الاتصال القضاء على الفجوة أو التآكل المبكر أو التكسير للأسطح الملامسة أثناء التشغيل ، فضلاً عن بساطة وراحة فكها وتجميعها. أمثلة على هذه الاتصالات موضحة في الشكل. 8. في الشكل. 8 أيوضح تركيب الرافعة على العمود ، حيث يتم نقل عزم الدوران من خلال مفتاح الإنهاء المدمج مع الغسالة. يستخدم هذا التثبيت في آليات الرافعة التي تعمل بسرعات منخفضة وأحمال متناوبة. في هذه الحالة ، عادةً ما يكون مفتاح الإنهاء مصنوعًا من الفولاذ 45 ويتعرض للتصلب لصلابة من وحدات HRC 35-40 ، ويتم تثبيته على العمود والرافعة لملاءمة H11 / d11. الاتصال سهل التصنيع وموثوق في التشغيل. على التين. 8 بيظهر الاتصال الطرفي للعمود بالرافعة ، حيث يتم نقل عزم الدوران بسبب قوى الاحتكاك بين السطح الخارجي للعمود وفتحة الرافعة ، والتي تنشأ عند إحكام ربطها بمسمار اقتران. لتحسين العقص للعمود ، يتم طحن الأخدود المركزي في الرافعة. يتم استخدام الاتصال ، مثل الاتصال السابق ، في آليات تعمل بسرعات منخفضة وأحمال متناوبة. على التين. 8 الخامسيظهر اتصال يتم فيه دمج مشبك العمود مع التثبيت بواسطة مسمار ، يكون الجزء الأوسط منه أكثر دقة من الحالة المعتادة ويتم ضغطه بإحكام على سطح التزاوج لأخدود أسطواني مفتوح مصنوع على الفتحة. هذا البرغي مصنوع من الفولاذ 45 ومصلب بصلابة HRC 35-40 وحدة ، ويتم تثبيت الجزء الأوسط منه على العمود وفقًا لـ H11 / d11. يمكن استخدام الاتصال لنقل عزم دوران كبير. الاتصال الموضح في الشكل. 8 د. في ذلك ، يتم نقل عزم الدوران عن طريق قوى الاحتكاك بين العمود والرافعة ، والتي يتم إنشاؤها عن طريق شد براغي ضبط وإراحة هذه البراغي على مسطحات العمود. في هذا التصميم المتصل ، يتم أيضًا تقوية ساق البرغي الملامس للعمود إلى صلابة HRC 35-40 وحدة. على التين. 8 جييظهر اتصال يتم فيه نقل عزم الدوران من العمود إلى الرافعة عن طريق محور إسفين ، والذي يثبت الرافعة بسبب ملامسة المسطح المتبادل المصنوع على العمود. يستخدم هذا الاتصال في آليات الرافعة التي تعمل بسرعات وأحمال عالية. في آليات الرافعة التي تعمل في ظل ظروف الأحمال الديناميكية المتناوبة بسرعات كبيرة ، يتم توصيلها بالعمود باستخدام اتصال مفصلي متمركز على السطح الجانبي ، كما هو موضح في الشكل. 8 ه. يتم عمل الشرائح الداخلية في الرافعة عن طريق السحب ، لذلك ، في حالة الإنتاج الفردي أو الصغير لمفاصل الروافع ذات العمود ، قد لا يكون استخدام الشرائح الملتوية مبررًا اقتصاديًا.
للوفاء بالمتطلبات المحددة لآليات الرافعة ، والتي تشمل الروافع وتعتمد بشكل أساسي على مجال التكنولوجيا التي تُستخدم فيها ، وبغض النظر عما إذا كانت ناتجًا أو رابطًا وسيطًا ، يمكن تضمين العديد من الأجهزة الإضافية فيها مما يسمح بما يلي:
- حماية الآلية من الحمل الزائد ،
- ضبط طول ذراع الرافعة ،
- اضبط زاوية الرافعة.
ضع في اعتبارك بعض الأمثلة على هذه الأجهزة المدمجة في الرافعات.
 أرز. 9. تصميم السلامة
أرز. 9. تصميم السلامة
جهاز مدمج في الرافعة بسهولة
آلية محملة.
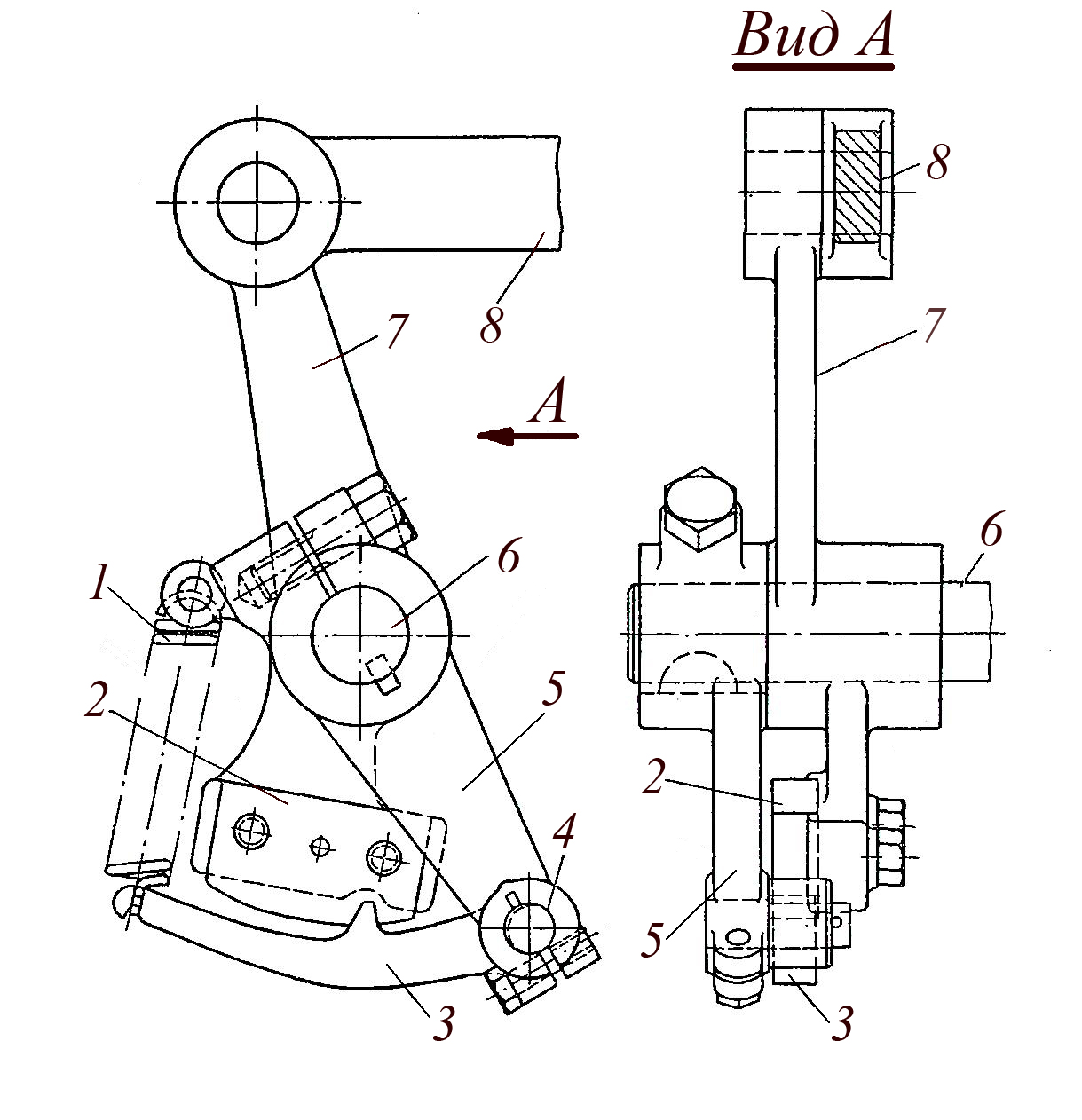
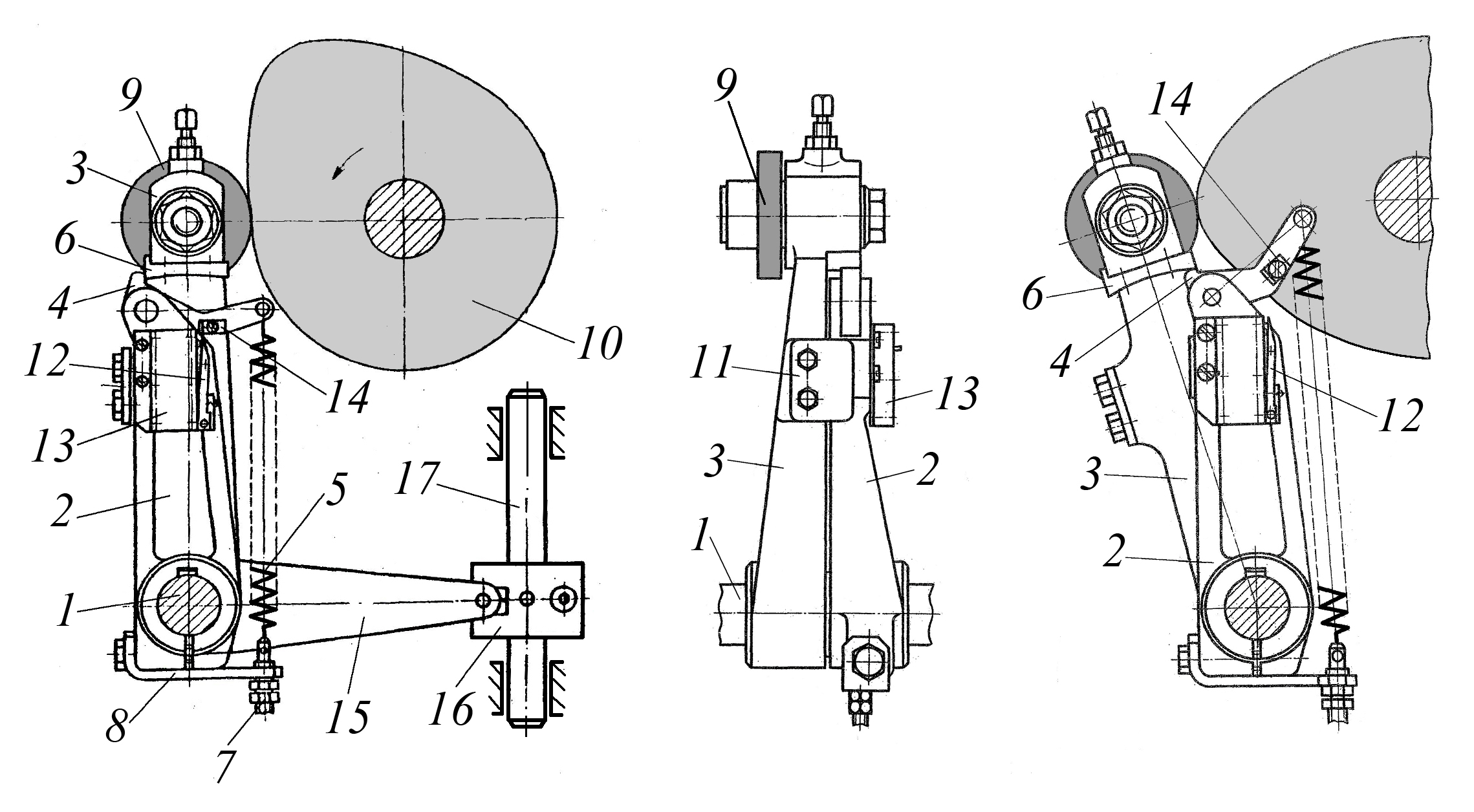
على التين. يوضح الشكل 9 تصميم جهاز الأمان المدمج في ذراع آلية محملة بشكل خفيف ، مما يضمن إنهاء نقل الحركة بواسطة الرافعة عندما يتم تطبيق أكثر من القوة المسموح بها على الجزء المدفوع. يحتوي على عمود 6 ، يتم تثبيت الرافعة 7 عليه بشكل محوري ، وهو متصل أيضًا بشكل محوري بقضيب التوصيل 8 ، ويتم تثبيت الرافعة 5 بشكل صارم على العمود 6 عن طريق توصيلات المفتاح والطرف ، بينما يتم توصيل الرافعة 5 بشكل محوري بـ المزلاج 3 ، الذي يتم ضغطه باستمرار بواسطة زنبرك الشد 1 ، على اللوحة 2 ، مثبت على الرافعة 7. يتم ملامسة المزلاج 3 مع اللوحة 2 عن طريق دخول السن إلى التجويف المقابل. إذا كانت هناك قوة متزايدة تعمل على قضيب التوصيل 8 ، فإن الزنبرك 1 يتمدد ويخرج سن المزلاج 3 من تجويف اللوحة 2 ولا تنتقل الحركة من الرافعة 5 إلى الرافعة 7 ، بينما يتم نقل الرافعة 5 ثابت على العمود ، يستمر في التأرجح. بعد توقف عمل القوة المتزايدة ، تدخل سن المزلاج 3 مرة أخرى بحرية في أخدود اللوحة 2 وتبدأ الرافعة 7 في التحرك بالرافعة 5 ككل ، بينما تنقل الحركة إلى قضيب التوصيل 8.
 أرز. 10. قوة السلامة المضمنة في ذراع الكامة.
أرز. 10. قوة السلامة المضمنة في ذراع الكامة.
على التين. يوضح الشكل 10 تصميم جهاز الأمان المدمج في الرافعة الجاهزة ثنائية الذراع ، والتي تمثل دافع آلية الكامة. يحتوي على رافعة مسبقة الصنع ثنائية الذراع مثبتة على العمود 1 ، ويتألف من ذراع هزاز 3 مع بكرة 9 ملامسة للكاميرا 10 وذراعين 2 ، والذراع الأمامي به نتوء 4 مضغوط بواسطة الربيع 5 إلى المحطة 6 من ذراع التأرجح 3 ، والذراع المتحرك 15 للرافعة 2 متصل بشكل محوري بالمبيت 16 المثبت على القضيب المدفوع 17. على الرافعة 2 ، يكون المحول الصغير 13 على اتصال برافعة التحويل 12 ، بالإضافة إلى السدادة 14 ، التي يمكن أن تتفاعل مع ذراع التبديل 12. يتم ضغط الأسطوانة 9 لذراع الروك 3 باستمرار على الكامة 10 عن طريق زنبرك (غير موضح في الشكل 193) ، وتفاعل يتم تنفيذ ذراع الروك 3 مع ذراع 2 ، عند تدوير ذراع الروك في اتجاه عقارب الساعة ، عن طريق القضيب 11.
الجهاز يعمل كالتالي. أثناء التشغيل العادي للآلية (في حالة عدم وجود أحمال زائدة) ، تنقل الكامة 10 عبر الأسطوانة 9 حركة هزازة إلى ذراع الروك 3 ، والتي ، عند اتصالها بموقفها 6 مع نتوء 4 من ذراع 2 ذراع ، تبلغ الأخير من حركة التأرجح ، والذراع المدفوع 15 الذي يتفاعل مع الجسم 16 المثبت على القضيب 17 يخبرها بالحركة الانتقالية (يقوم الشريط بعمل ضربة عمل). عندما يتأرجح ذراع التأرجح 2 في اتجاه عقارب الساعة ، تنتقل حركة الرافعة 3 عن طريق الشريط 11 والذراع المدفوع 15 للرافعة 2 يخبر القضيب 17 بالتحرك في الاتجاه المعاكس (تباطؤ القضيب) ، بالتفاعل معه من خلال الجسم 16. مع هذا الترتيب المتبادل للذراع المتأرجح 3 والذراع الرئيسي للرافعة 2 ، يعمل السدادة 14 على ذراع التبديل 12 ، والتي بدورها تغلق المحول الصغير 13. عندما يتم تطبيق الحمل على القضيب 17 يزداد فوق الحد المسموح به ، عندما يقوم بضربة عمل ، يتوقف الأخير مع الجسم 16 وذراعان 2 ، والكاميرا 10 ، استمرار الدوران في نفس الاتجاه ، يعمل على الأسطوانة 9 ، والروك الذراع 3 ، التغلب على قوة الربيع 5 ، يتحول عكس اتجاه عقارب الساعة. نتيجة لذلك ، يقوم الإيقاف 14 بإطلاق ذراع التبديل 12 ويقوم الأخير بإيقاف تشغيل المحول الصغير 13 ، والذي في نفس الوقت يوقف تشغيل الماكينة من خلال النظام الأوتوماتيكي الكهربائي.
 أرز. 11. تصميم الرافعة الجاهزة والتي تشتمل على جهاز لتعويض الأحمال الديناميكية.
أرز. 11. تصميم الرافعة الجاهزة والتي تشتمل على جهاز لتعويض الأحمال الديناميكية.
على التين. يوضح الشكل 11 تصميم الرافعة الجاهزة ، والتي تتضمن جهازًا لتعويض الأحمال الديناميكية التي تعمل في الاتجاه المعاكس لعمل القوة التكنولوجية التي تنتقل بواسطة آلية الرافعة. تحتوي هذه الرافعة على الكتفين المتقدمين 1 والكتفين المحركين ، متصلين ببعضهما البعض بواسطة الغلاف المنزلق 3 ، والذراع الرئيسي 1 مثبت على الكم ، والذراع المدفوع 2 قابل للدوران عليه. يتم تثبيت الحلقات المضادة للاحتكاك 4 بين نهايات محاور الذراعين 1 و 2. يتم ملامسة الذراعين 1 و 2 على طول الأسطح الداعمة 5 و 6. على أسطح الذراعين 1 و 2 من الرافعة ، يتم عمل العروات 7 و 8 ، في الفتحات التي تم تثبيت دبوس 9 فيها ، والتي تشد العروات عن طريق الصواميل 11 من خلال الملحق المرن 10 المصنوع على شكل غلاف.
أثناء تشغيل الآلية ، التي تتضمن رافعة مسبقة الصنع ، تنتقل القوة التكنولوجية من ذراع القيادة 1 إلى الذراع المدارة 2 عبر الأسطح الداعمة 5 و 6. عندما تحدث أحمال ديناميكية أثناء تشغيل الآلية في الاتجاه المعاكس لـ تأثير القوة التكنولوجية ، يبدأ الذراع المدفوع 2 في الخروج مع سطحه 6 من السطح الداعم 5 للرافعة الرائدة 1 وفي نفس الوقت يدور عكس اتجاه عقارب الساعة بالنسبة للذراع الأمامي 1. ونتيجة لذلك ، فإن الحشوة المرنة 10 ثابت بين العروات 7 و 8 مضغوط ويعوض عن تأثير الحمل الديناميكي على الآلية ، كما أنه يخفف بشكل فعال الاهتزازات الناتجة لآلية الأجزاء.
 أرز. 12. تصميم الرافعة الجاهزة ، والتي تشمل أسطوانة الالتواء
أرز. 12. تصميم الرافعة الجاهزة ، والتي تشمل أسطوانة الالتواء
للتعويض عن الأحمال الديناميكية.
على التين. يوضح الشكل 12 تصميم الرافعة الجاهزة ، والتي تتضمن بكرة الالتواء للتعويض عن الأحمال الديناميكية التي تعمل في الاتجاه المعاكس لعمل القوة التكنولوجية التي تنتقل بواسطة آلية الرافعة. تتكون هذه الرافعة من ذراع قيادة 1 ، متصل بشكل صارم بالكم 4 ، مركب بشكل محوري في الدعامات 2 وملامس لذراعين متحركين 3 موجودين في نهاياته ومتصلين به عن طريق عمود الالتواء 5 الموجود بالداخل الأكمام. في الوقت نفسه ، يتم ضغط الأذرع المدفوعة 3 للرافعة من خلال حشيات مانعة للاحتكاك 6 على نهايات الكم 4 عن طريق المسامير 7 والصواميل 8. 4 ، يتم عمل أخاديد نصف قطرية متبادلة ، وتشكيل فجوات بنهايات النتوءات الشعاعية. عند تجميع الرافعة كجزء من الآلية ، يتم لف عمود الالتواء 5 مبدئيًا بطريقة تجعل الفجوة بين نهايات النتوءات الشعاعية لمسامير الأذرع المدفوعة 3 ونهايات الأخاديد الشعاعية المتبادلة للكم يتم تحديد 4 عند الاتصال أثناء نقل القوة التكنولوجية بواسطة الرافعة.
أثناء تشغيل الآلية ، التي تتضمن الرافعة الجاهزة ، تنتقل القوة التكنولوجية من ذراع القيادة 1 عبر الكم 4 ونهايات أخاديد نصف قطرها إلى نهايات نتوءات نصف القطر على دبابيس الأذرع المدفوعة 3 ، ويقوم الأخير بحركة هزازة ، وينقلها إلى رابط خرج الآلية. عندما يحدث حمل ديناميكي ، يعمل في الاتجاه المعاكس لتأثير القوة التكنولوجية ، تبدأ الأذرع المدفوعة 3 بالدوران في الاتجاه المعاكس بالإضافة إلى تحريف بكرة الالتواء 5 ، مما يقلل التشوه المرن من تأثير الأحمال بالقصور الذاتي على أجزاء الآلية.
 أرز. 13. تصميم الرافعة المجمعة لآلية محملة بشدة بجهاز أمان مدمج بالقوة.
أرز. 13. تصميم الرافعة المجمعة لآلية محملة بشدة بجهاز أمان مدمج بالقوة.
تكون الصمامات المدروسة بالقوة والمدمجة في الروافع من النوع القابل للاسترداد ، مما يجعل استخدامها فعالًا للغاية ، ولكن للأسف ، من المستحيل استخدامها في آليات الرافعة المحملة بشكل كبير. يتم دمج فتيل القوة القابلة للتدمير في روافع الآليات المحملة بشكل كبير. يظهر في الشكل. في الشكل 13 ، تحتوي الرافعة المُجمَّعة بجهاز أمان قوة مدمج على ذراع قيادة 1 مُركب بشكل محوري عن طريق كم منزلق 2 على محور 3 مثبت بشكل صارم على الإطار 4 ، بينما يتم أيضًا تثبيت ذراع الدفع 6 للرافعة بشكل محوري على نفس المحور 3 عن طريق جلبة منزلقة. يتم توصيل كلا الرافعتين باستخدام دبوس القص 10 المثبت في البطانات 7 و 8 و 9 مضغوط في فتحة ذراع القيادة 1 وفتحة الرافعة المدفوعة 6. إذا كان تتجاوز القوة المنقولة بواسطة الرافعة المجمعة القيمة المسموح بها ، ثم يتم قص الدبوس 10 ويتم إنهاء اتصال الذراع المتحرك 1 بالذراع الرئيسي 6 للرافعة وهذا يمنع الأجزاء الأكثر تعقيدًا وتكلفة من الآلية من الانكسار.
 أرز. 14. جهاز مدمج في الرافعة لوصلة خفيفة الوزن تسمح لك بضبط طول ذراعها الأمامية.
أرز. 14. جهاز مدمج في الرافعة لوصلة خفيفة الوزن تسمح لك بضبط طول ذراعها الأمامية.
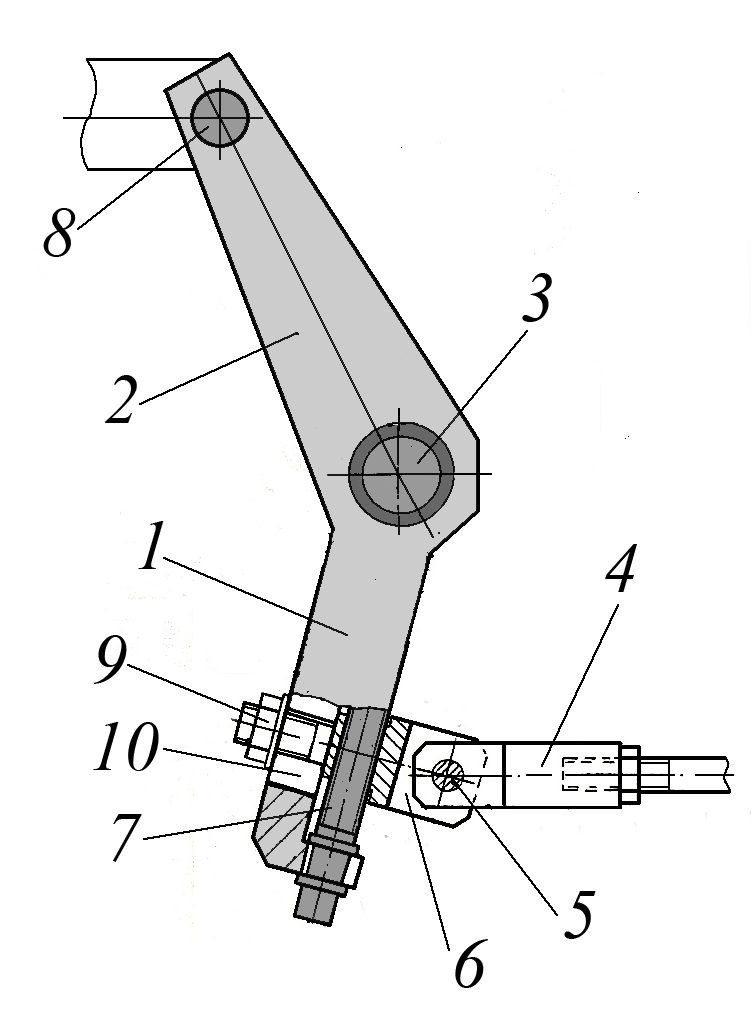
على التين. يوضح الشكل 14 جهازًا مدمجًا في ذراع وصلة محملة بشكل خفيف تسمح بضبط طول ذراعها الأمامية. في هذه الرافعة ، التي تتكون من الذراعين الرائدين 1 والذراعين المحركين والمثبتة على المحور 3 ، تم بناء الإصبع 6 ، ومتصل بشكل محوري عن طريق المحور 5 بقضيب القيادة 4 ومثبت في الموضع المطلوب في الأخدود 10 بمساعدة الجوز 9 ، وبرغي ضبط 7. في نفس الوقت ، يتم توصيل الذراع المحركة 2 للرافعة بشكل محوري عن طريق المحور 8 بالوصلة المدفوعة لآلية الرافعة. عند ضبط طول الذراع الأمامية 1 للرافعة ، يتم فك الجوز 9 ، ثم يتم تحريك الإصبع 6 إلى جانب واحد أو آخر على طول أخدود الذراع الأمامية 1 للرافعة مع برغي الضبط 7 ثم يتم قفل الإصبع 6 لاحقًا باستخدام الجوز 9.
 أرز. 15. تصميم الجهاز مدمج في ذراع الوصلة المحملة بشكل كبير ، مما يتيح لك الضبط
أرز. 15. تصميم الجهاز مدمج في ذراع الوصلة المحملة بشكل كبير ، مما يتيح لك الضبط
طول كتفه المدفوعة.
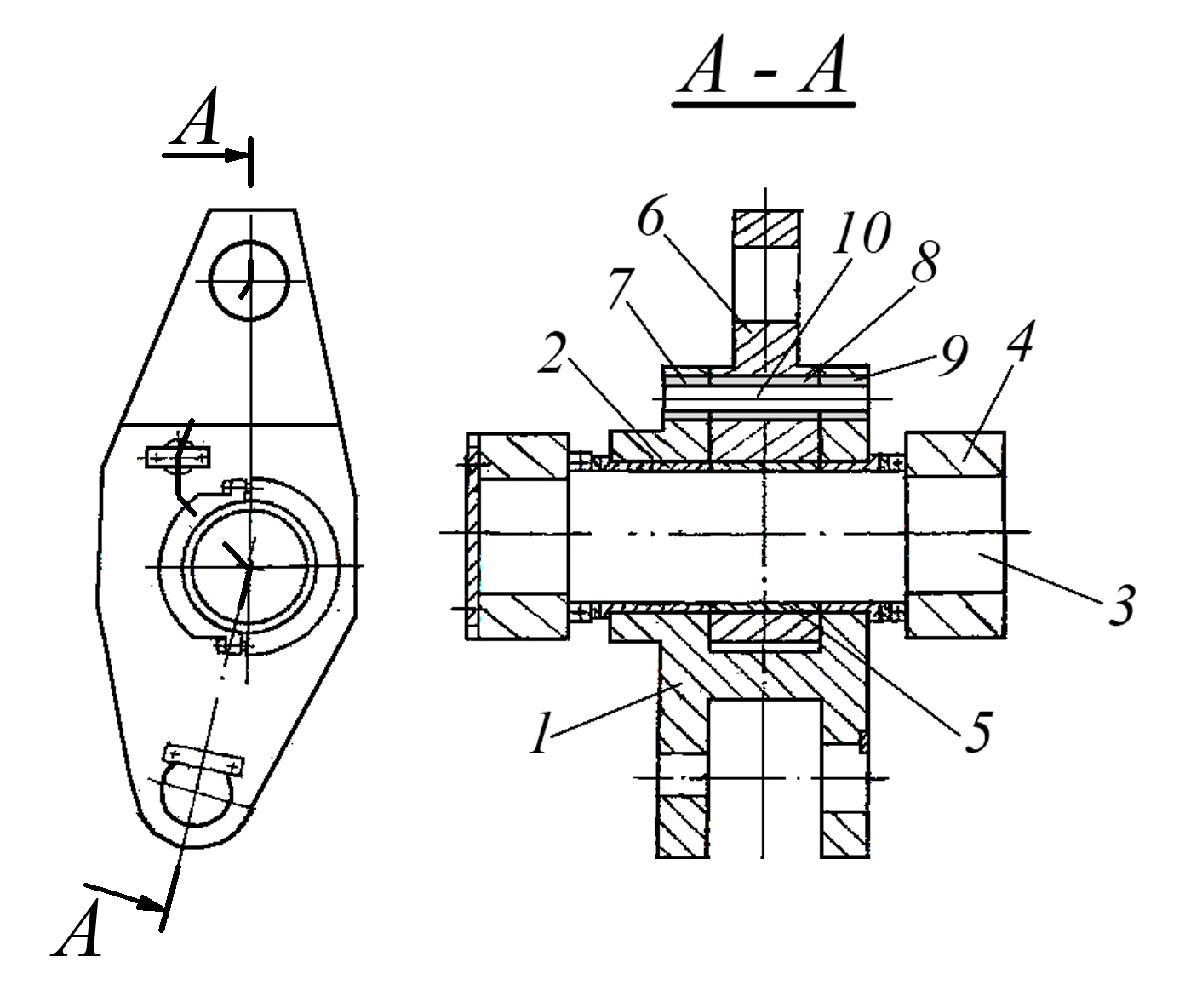
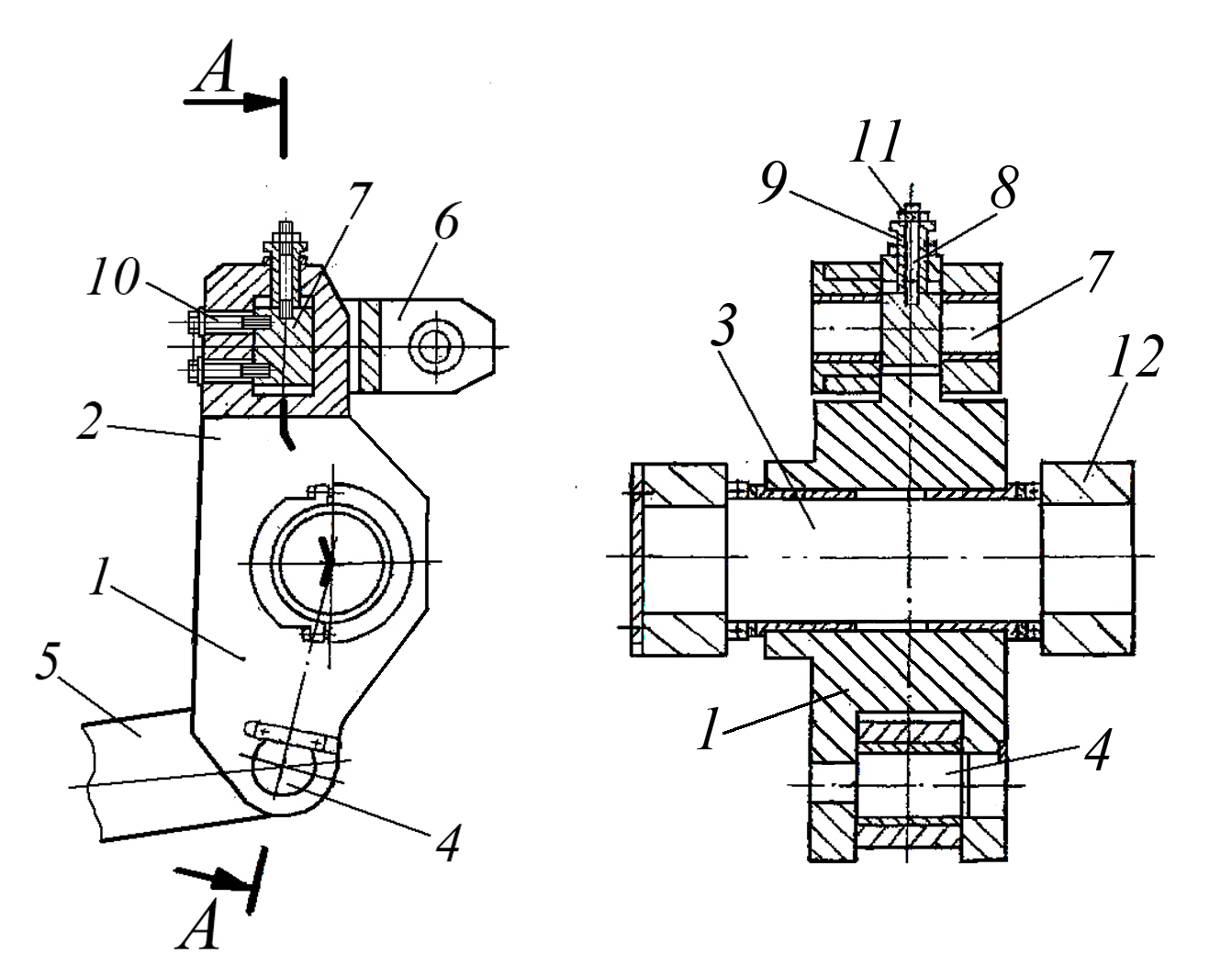
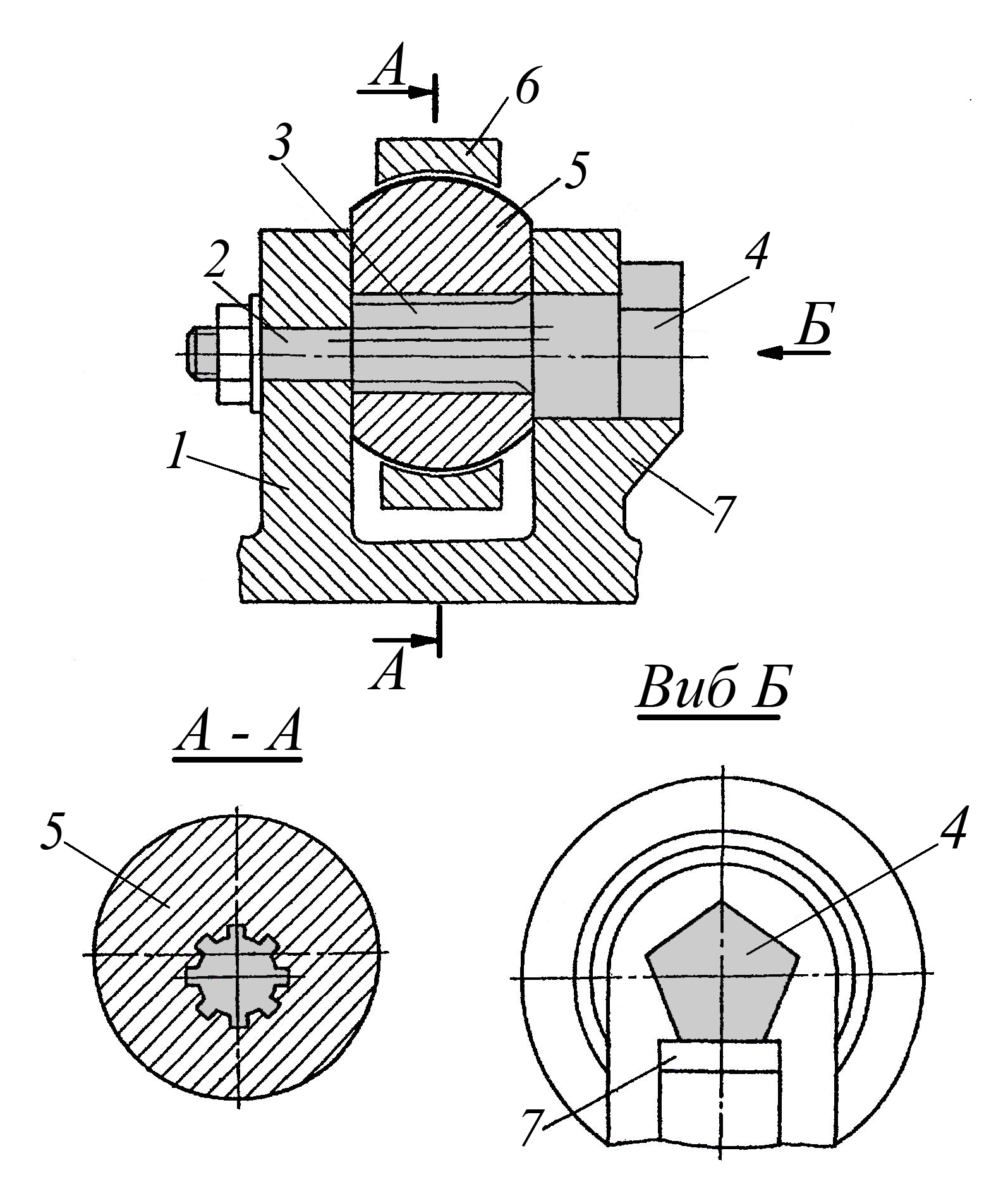
على التين. يوضح الشكل 15 تصميم جهاز مدمج في ذراع آلية ربط محملة بشكل كبير تسمح لك بضبط طول ذراعها المدفوع. في هذه الرافعة ، التي تتكون من الأذرع الرائدة 1 وذراعان مدفوعان ومتصلة بشكل محوري عن طريق المحور 4 مع قضيب القيادة ومثبتة على المحور 3 ، تم بناء المحور 7 ، الموجود في نافذة ذراعه المدفوع ، الذي يربط الذراع 2 بالقضيب المدفوع 6. في هذه الحالة ، يتم تثبيت ذراع المحور 3 بشكل صارم في الإطار 12. المحور 7 في الجزء المركزي له شكل موشوري ويقع في أخدود الذراع المدفوع 2 من الرافعة ، التي تمنحها القدرة على الحركة ، والتي توفر تغييرًا في المسافة بينه وبين المحور 3. هذا التصميم للمحور 7 ، والذي يتم تحريكه في أخدود الذراع المدفوع 2 من الرافعة عن طريق من مسمار 8 وجلبة ملولبة 9 ، والتثبيت في الموضع المطلوب عن طريق البراغي 10 والصواميل 11 يسمح لك بتغيير طول الذراع المدفوع 2 للرافعة ، وهو أمر ضروري عند ضبط شوط وصلة الخرج من آلية الرافعة ، والتي تشمل الرافعة.
 التين .16 تصميم آلية لضبط طول ذراع الرافعة ، حيث لا يتغير موضعها الزاوي.
التين .16 تصميم آلية لضبط طول ذراع الرافعة ، حيث لا يتغير موضعها الزاوي.
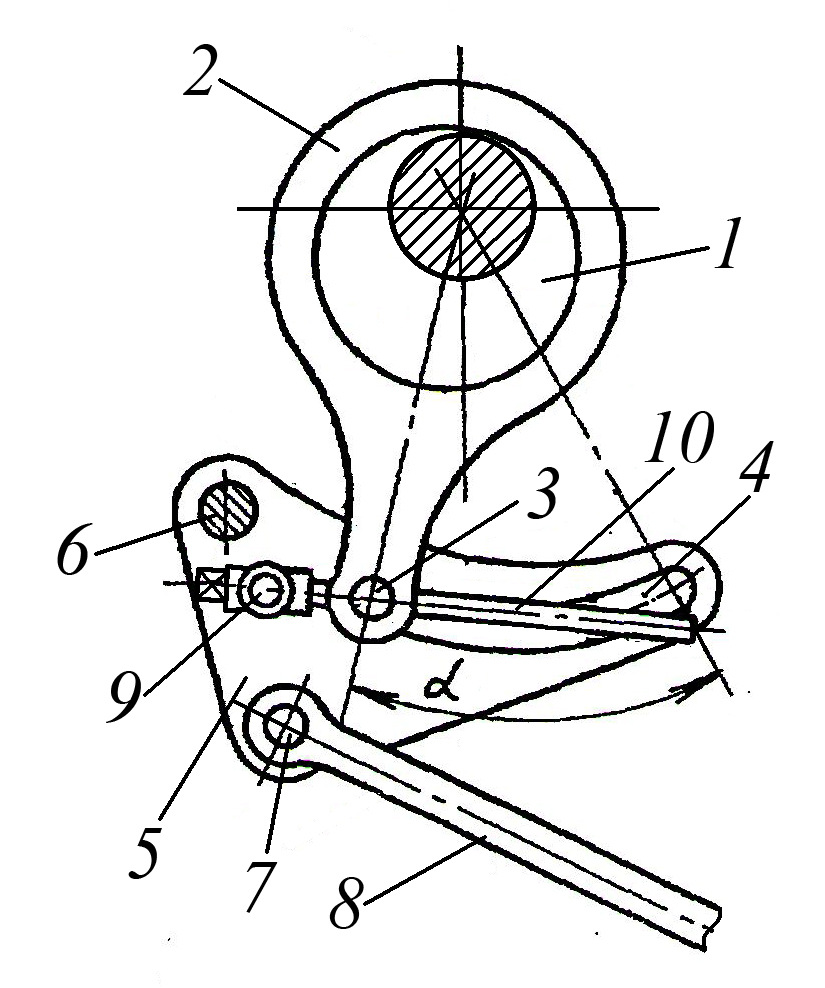
عيب تصميم الأجهزة لضبط طول ذراع الرافعة هو أنه عند إجراء التعديل ، يتغير الوضع الزاوي للرافعة بالنسبة لمحور التأرجح ، وهو أمر غير مقبول في بعض الحالات. يوضح الشكل 16 تصميم آلية ضبط طول ذراع الرافعة ، حيث لا يتغير موضعها الزاوي. تحتوي هذه الآلية على عمود كرنك 1 ، على عنق العمود المرفقي مثبت عليه قضيب توصيل 2 ، والذي ، عن طريق الإصبع - الزواحف 3 ، متصل بشكل محوري برافعة وسيطة ثنائية الذراع 5 ، والتي ، باستخدام محور 6 ، مثبت بشكل محوري على الإطار (غير مبين في الشكل 16) وذراعه المتحرك متصل من خلال المحور 7 بالقضيب المتحرك 8. وفي نفس الوقت ، يتم تثبيت دبوس 9 بشكل محوري على الرافعة 5 ، في الفتحة التي يتم تثبيت المسمار 10 منها وتثبيته في الاتجاه المحوري ، ويتفاعل طرفه الملولب مع الفتحة الملولبة في الدبوس 3 ، والذي يقع مع إمكانية الحركة في أخدود نصف القطر 4 للرافعة 5 ويتم تثبيته في بنفس الطريقة الموضحة في الشكل 197. يتم ضبط طول الذراع الأمامية للذراع ثنائي الذراعين 5 عن طريق تدوير المسمار اللولبي 10 ، ونتيجة لذلك يتحرك الدبوس 3 في أخدود نصف القطر 4 ، بينما يضمن شكل نصف القطر لهذا الأخدود وضعًا ثابتًا للرافعة 5 عند الضبط.
 شكل 17 تصميم الجهاز لضبط الموضع الزاوي للرافعة بالنسبة لمحورها المتأرجح.
شكل 17 تصميم الجهاز لضبط الموضع الزاوي للرافعة بالنسبة لمحورها المتأرجح.
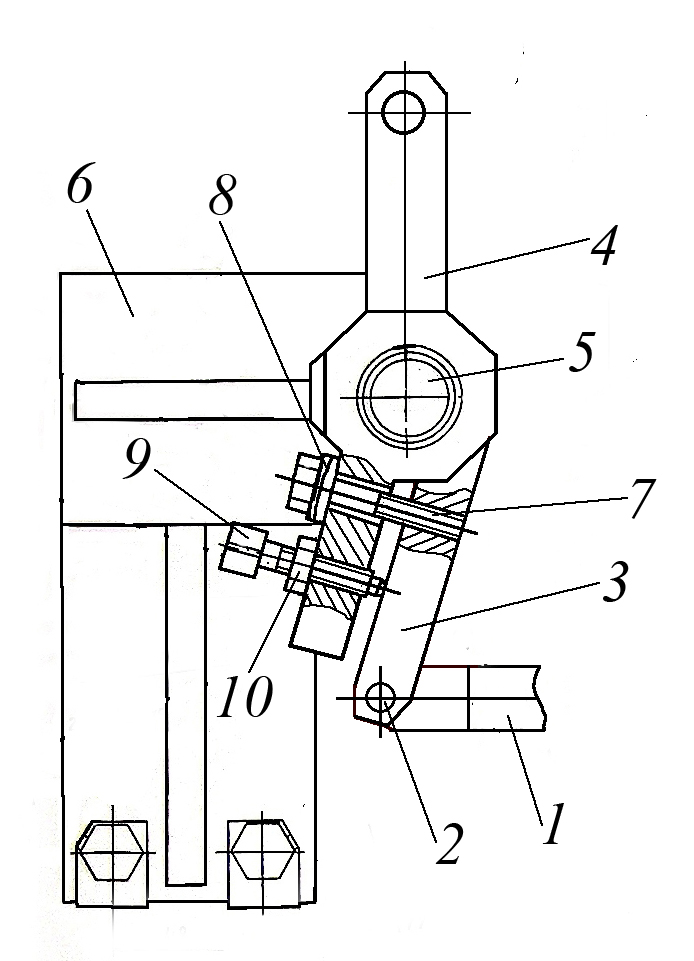
في عدد من آليات التشغيل والمساعدات للمعدات التكنولوجية ، يصبح من الضروري ضبط الموضع الأولي لوصلة الإخراج ، والتي يمكن تحقيقها عن طريق ضبط الموضع الزاوي للرافعة ، بغض النظر عما إذا كان ناتجًا أم رابطًا وسيطًا للرافعة. آلية. يوضح الشكل 17 تصميم الجهاز لضبط الموضع الزاوي للرافعة بالنسبة إلى محور التأرجح الخاص به. ويحتوي على قضيب رئيسي 1 ، وهو متصل بشكل محوري بذراع الروك الرئيسي 3 عن طريق المحور 2 ، والذي ، مثل يتم تثبيت ذراع الدفع 4 الذي يتم تحريكه بشكل محوري على دبوس 5 مثبت على قوس 6. وفي نفس الوقت ، يتم توصيل ذراع التأرجح 3 والذراع 4 بشكل صارم مع بعضهما البعض عن طريق الترباس 7 المركب على الرافعة 4 تستخدم مجموعة من الحلقات الكروية 8 ومسمار توقف 9 ، يتم تثبيت الموضع المحوري في الرافعة 4 بواسطة صمولة 10. هذا الاتصال للرافعة 4 والظهر 3 ، مع موضع الأخير بدون تغيير ، يسمح لك بتغيير الوضع الزاوي للرافعة
ha 4 ، والتي يتم تنفيذها عن طريق شد وفك البراغي 7 والمسمار 9.
ومع ذلك ، يتيح لك هذا الضبط ضبط موضع الرافعة في نطاق ضيق. يمكن تحقيق قدر كبير من ضبط الموضع الزاوي للرافعة عن طريق ضبط طول قضيب القيادة ، والذي يتم تنفيذه بالطرق المعروفة.
الأسلحة الروك
أذرع الروك ، كما ذكرنا سابقًا ، هي واحدة من أنواع الرافعات ، وتستخدم أيضًا على نطاق واسع في آليات الرافعة. يتم استخدامها في الحالات التي يكون فيها من الضروري ، دون تغيير اتجاه الحركة ، تغيير حجمها ، أو الحصول على قانون أكثر تعقيدًا لحركة الرابط الرئيسي لآلية الرافعة. على التين. يوضح الشكل 18 عدة خيارات لاستخدام أذرع الروك كجزء من آليات الرافعة. على التين. يُظهر الشكل 18 أ مخططًا حركيًا لآلية الرافعة ، حيث يقوم الروك بتوصيل قضيب التوصيل المحوري بقضيب التوصيل المدفوع ، مع زيادة شوط المنزلق. على التين. يُظهر الشكل 18 ب ، ج ، د مخططًا حركيًا لآلية الرافعة التي تحتوي على هزاز وسيط ومدفوع ، بينما يسمح لك وجود الروك المتوسط بالحصول على قانون الحركة المطلوب للاهتزاز المدفوع. على التين. 18 ب ، في كل من أذرع التأرجح متصلة بشكل محوري بقضيب التوصيل المدفوع لآلية الربط ، وفي الشكل. 18g ، يتم توصيل الروك المتوسط بالقيادة وقضبان التوصيل المدفوعة في نفس الوقت ، ويتم توصيل الروك المدفوع بقضيب التوصيل المدفوع.
.
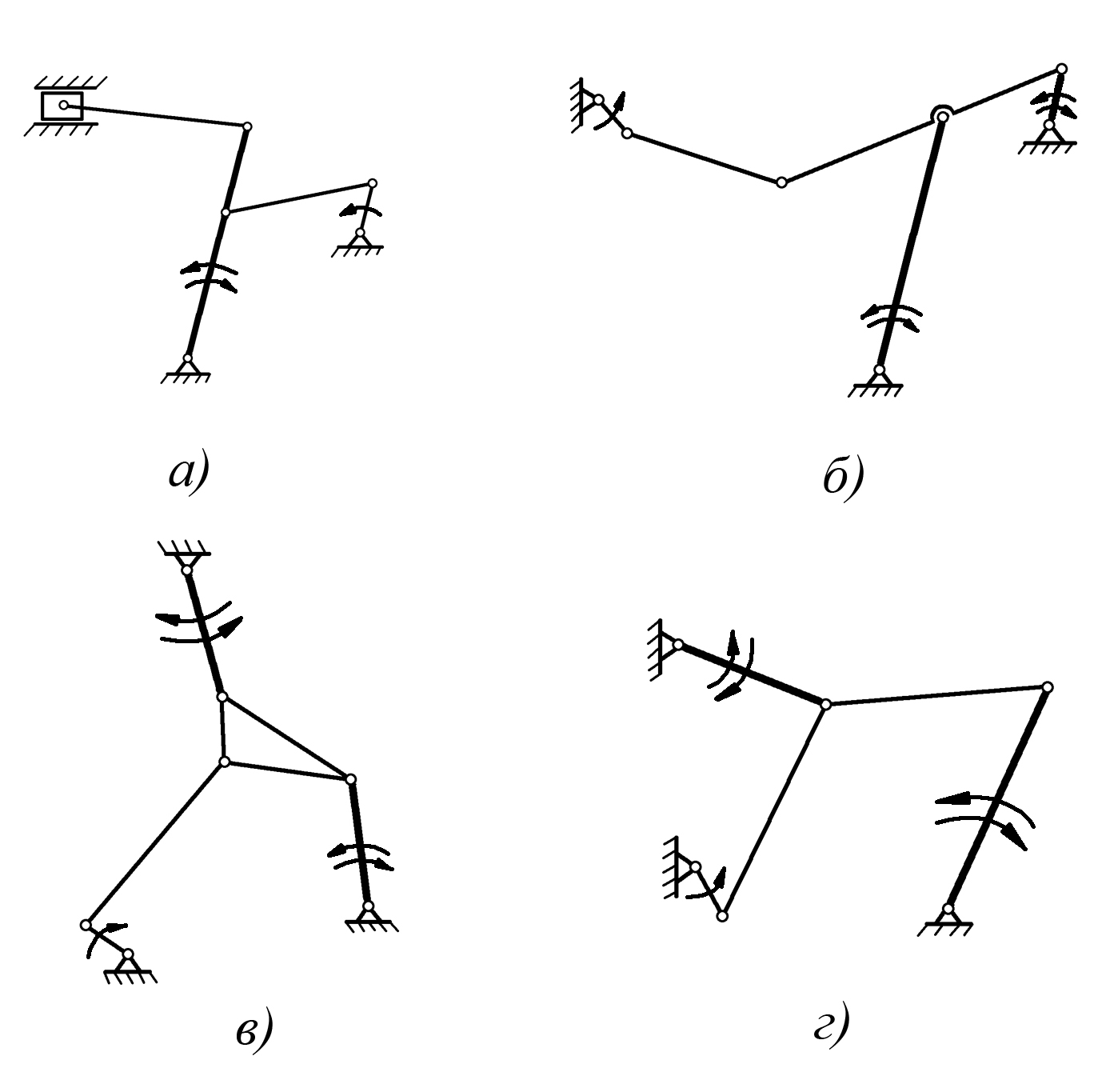 أرز. 18. تحتوي المخططات الحركية لآليات الرافعة
أرز. 18. تحتوي المخططات الحركية لآليات الرافعة
الأسلحة الروك.
على التين. يوضح الشكل 19 تصميم الرافعة المصنوعة على أساس آلية الرافعة التي تحتوي على الروك كعنصر دعم رئيسي. يحتوي على حذاء دعم 1 ، والذي من خلال المحور 2 متصل بشكل محوري بحزمة الدعم 3 ، والأخير ، من خلال المحور 5 ، متصل بشكل محوري بقضيب التوصيل 4 ، وهو متصل بشكل محوري بقضيب التوصيل 9 من خلال المحور 8. بالإضافة إلى ذلك ، يتم توصيل شعاع الدعم 3 بشكل محوري بقضيب التوصيل 6 ، والأخير ، بدوره ، من خلال المحور 10 متصل بقضيب التوصيل 9 ، ومن خلال المحور 11 مع حذاء الدعم العلوي 12 من جاك. في هذه الحالة ، يتم توصيل المحورين 7 و 8 بواسطة المسمار اللولبي 14 بالمقبض 15 ، والذي يكون على اتصال بالمحور 8 عن طريق وصلة ملولبة ، وبالمحور 7 من خلال فتحة ناعمة وكتف 13. في في هذه الحالة ، تشكل الوصلات المفصلية لذراع الروك 3 وقضبان التوصيل 4 و 6 و 9 فيما بينها آلية متوازية الأضلاع ، والتي ، جنبًا إلى جنب مع توصيل المحاور 7 و 8 عن طريق المسمار الرئيسي 14 ، تجعل ذلك ممكنًا للحصول على مكاسب في الجهد ويضمن الحركة الموازية للحذاء 12 عند رفعه وخفضه.
جاك يعمل على النحو التالي. يؤدي دوران المقبض 15 جنبًا إلى جنب مع المسمار اللولبي 14 في اتجاه عقارب الساعة إلى تقارب المحورين 7 و 8 في الاتجاه الأفقي ، بينما يحرك الروك 3 عكس اتجاه عقارب الساعة قضبان التوصيل 9 و 10 بطريقة تجعل حذاء الدعم العلوي 12 يرتفع مع الحمولة المرفوعة. عندما يتم تدوير المقبض 15 مع المسمار اللولبي 14 في الاتجاه المعاكس ، يتباعد المحاور 7 و 8 في الاتجاه الأفقي ، ويدور ذراع الروك 3 في اتجاه عقارب الساعة ، وقضبان التوصيل 9 و 10 ، تتحرك وفقًا لذلك ، حرك حذاء الدعم 12 لأسفل مع الحمولة المرفوعة مسبقًا.
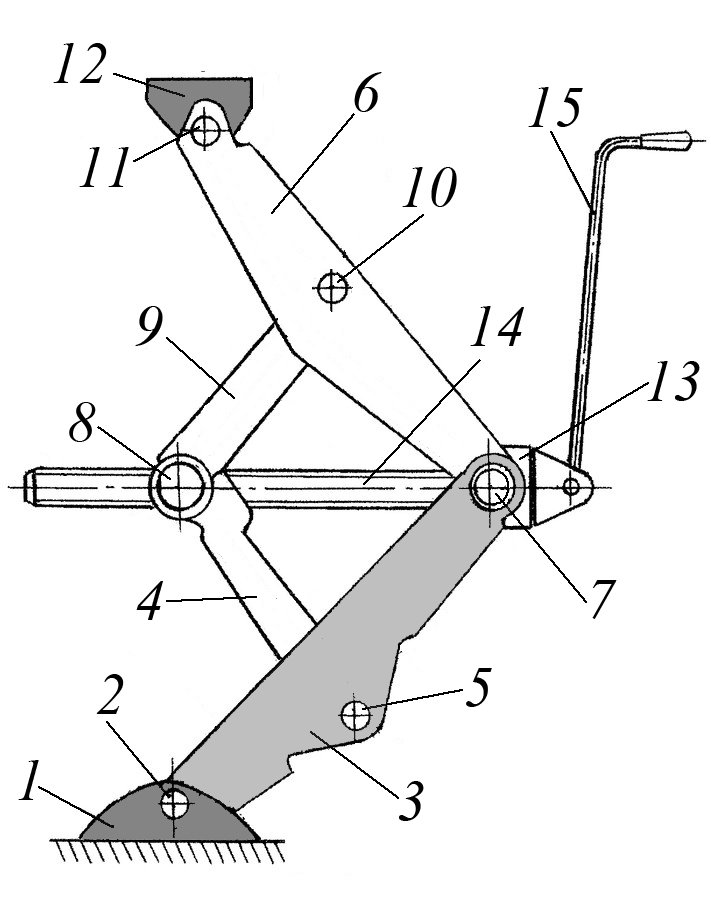 أرز. 19. تصميم جاك على أساس
أرز. 19. تصميم جاك على أساس
آلية رافعة.
عند تثبيت عدة أذرع متأرجحة على محور واحد ، والتي يتم تثبيتها على حامل ، يمكن تركيبها بشكل صارم عليها ، بينما يمكن وضع المحور نفسه على الإطار بواسطة المحامل. على التين. يوضح الشكل 20 تصميم وحدة التحكم في فرامل الجرار ، والتي تم تصنيعها على أساس العديد من أذرع الروك الموجودة على محور مشترك مثبت بواسطة أقواس على الإطار. تحتوي وحدة التحكم في أذرع الجرار على محور 2 ، مثبت عن طريق محامل مفصلية 9 في الأقواس 1 مثبتة على قاعدة ثابتة ، على السطح المائل الذي تم تثبيت الأجنحة المدفوعة 3 و 4 بشكل صارم ، بالإضافة إلى مسننة يتم تثبيت القطاع 6 مع درع 12 ، وهو متصل محوريًا به ، بالإضافة إلى رابط محرك 5 بشكل محوري. ويتم التثبيت المحوري للأجزاء المثبتة على المحور 2 عن طريق حلقة التثبيت 7 والصمولة الأصلية 14. الوصلات الكروية 9 محكمة الغلق من الداخل بأصفاد 8 ، ومن الخارج تغلق بأغطية 10 مضغوطة في العلب 1. وصلة القيادة 5 والوصلة المدفوعة 4 متصلة بقضبان التحكم المقابلة عن طريق محامل مفصلية 13.
تعمل وحدة التحكم في الفرامل على النحو التالي. عندما يتم تدوير رابط القيادة 5 في اتجاه عقارب الساعة ، يتحرك القرص 12 على طول قوس ، مع نهايته المدببة تلتقط عددًا معينًا من الأسنان في قطاع التروس 6 ، بينما المحور 2 مع أذرع الروك المدفوعة 3 و 4 ، وكذلك يظل قطاع التروس 6 ثابتًا. عندما يتم تشغيل رابط القيادة 5 في عكس اتجاه عقارب الساعة ، فإن المخلب يستقر مع نهايته المدببة مقابل السن المقابل للقطاع 6 ، وبالتالي يجعله ، جنبًا إلى جنب مع المحور 2 وأذرع الروك المدفوعة 3 و 4 ، يدوران في نفس الاتجاه ، مثل نتيجة ذلك تحرك الأخير قضبان التحكم في الفرامل (في الشكل 20 غير موضح).
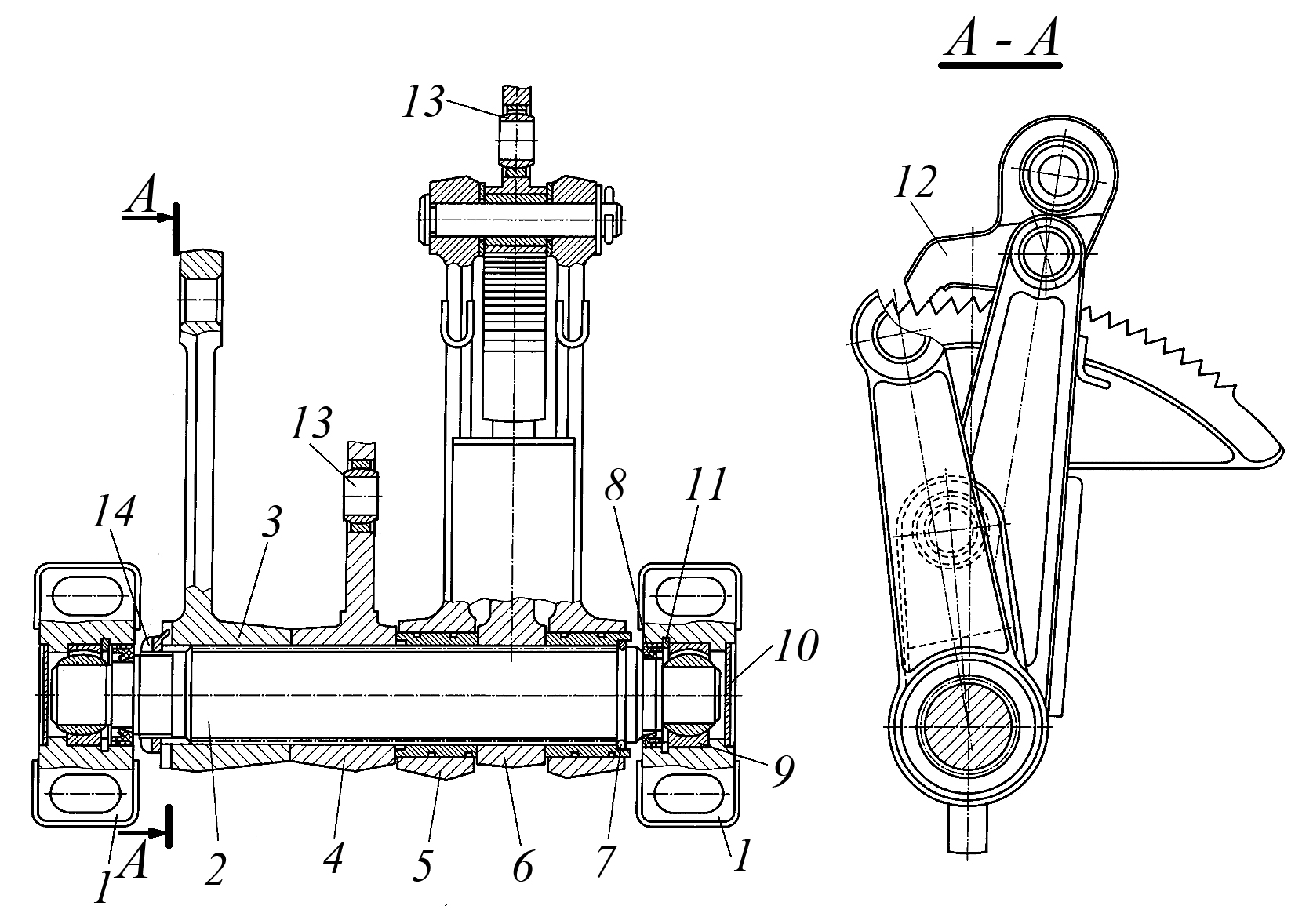 أرز. 20. تم تصميم وحدة التحكم بفرامل الجرار
أرز. 20. تم تصميم وحدة التحكم بفرامل الجرار
على أساس العديد من أذرع الروك الموجودة على محور مشترك.
قد يشمل تكوين أذرع التأرجح ، بالإضافة إلى تكوين الرافعات ، أجهزة تعمل على توسيع قدرات آليات الرافعة ، والتي تشمل هذه الروافع. في أغلب الأحيان ، هذه هي الأجهزة التي تغير ذراع الكرسي الهزاز أو موضعه. على التين. يوضح الشكل 21 تصميم الروك بمسافة قابلة للتعديل من محور الدوران إلى محور التأرجح المتأرجح. يتكون هذا الروك 1 من فتحات عرضية الخامس
خطوة بخطوة تي
والأخدود الطولي أ
، حيث يتم تثبيت دبوس 4 مع ذوي الياقات البيضاء ب
ونهايتين ملولبة ، بينما في نهاية الدبوس يمر في الأخدود الطولي أ
غسالة وسيطة 2 ، غسالة داعمة 3 وصمولة 5. يتم عمل أخدود طولي في الغسالة الوسيطة 2 ، بطولها إل
يتم تحديده بالصيغة التالية: L = د + 2T / (T-t) ر
بالإضافة إلى ذلك ، يتم عمل فتحات في الغسالة الوسيطة 2 من جانب ملامستها لذراع الروك 1 جي
خطوة بخطوة تي
يتم عمل فتحات متبادلة على الروك ، وعلى السطح المقابل للغسالة الوسيطة ، يتم عمل فتحتين د
خطوة بخطوة ر
، والتي هي على اتصال مع شرائح التزاوج ه
3. في الجزء السفلي من الروك ، يتم عمل ثقب 6 ، حيث يتم تثبيت المحور المقابل لدوران الروك مع الحامل الثابت. تعديل المسافة الخشنة ص
من محور الدوران إلى محور تأرجح الروك يتم عن طريق تحويل الغسالة الوسيطة 2 في الأخدود الطولي أ
أذرع الروك ، والتعديل الدقيق - عن طريق الإزاحة الطولية للغسالة الداعمة 3 بالنسبة للغسالة الوسيطة 2 بسبب وجود أخدود طولي فيها. في هذه الحالة ، يتم تحديد قيمة التعديل بالصيغة التالية:
؟؟؟؟ R = n1T - n2t ؛
أين:
– n1
، عدد الأسنان التي يتم بها إزاحة الغسالة المتوسطة 2 ،
– n2
، عدد الأسنان التي يتم بها إزاحة الغسالة الداعمة 3.
لسهولة ضبط موضع الإصبع 4 ، يمكن تطبيق مقياس بالتقسيمات المقابلة على الروك 1.
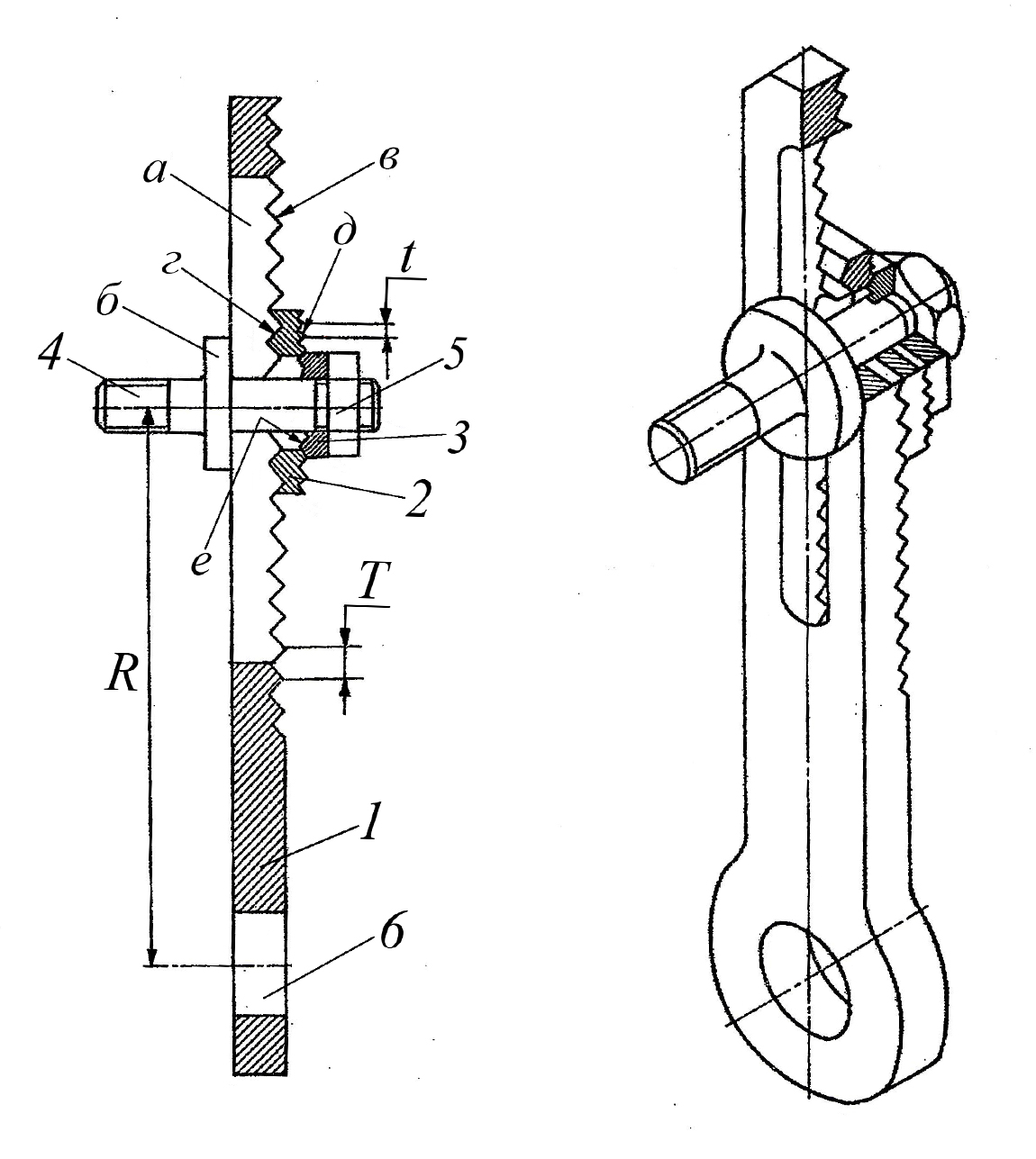 أرز. 21. تصميم ذراع الكرسي الهزاز مع مسافة قابلة للتعديل
أرز. 21. تصميم ذراع الكرسي الهزاز مع مسافة قابلة للتعديل
من المحور الدوار إلى محور تأرجح ذراع الكرسي الهزاز.
في بعض آليات الرافعة ، يتم التحكم في الوضع الزاوي للاهتزاز عن طريق تدوير محور تأرجحه. على التين. يوضح الشكل 22 تصميم محور التأرجح للاهتزاز ، مما يتيح لك ضبط موضعه. لتنظيم موضع الروك ، فإن محور التأرجح 2 ، المثبت في فتحات الحامل 1 ، مصنوع من عنق غريب الأطوار 3 ، حيث يتم تثبيت كم غريب الأطوار 5 مع سطح كروي خارجي ملامس لسطح التزاوج الروك 6. في نفس الوقت ، يتم تثبيت حلقة على الطرف الملولب للمحور 2 وصامولة لتثبيتها المحورية ، ويتم تصنيع رأس المحور الموجود في الطرف المقابل على شكل متعدد السطوح ، كل وجه من والتي ، عند موضع زاوي معين للمحور 2 ، يمكن أن تلامس سطح التزاوج 7 ، المصنوع على شكل نتوء على الرف 1. لضبط موضع المحور المتأرجح للذراع المتأرجح 6 المحور 2 والكم اللامتراكز 5 يتم تدويرها ، والتي يمكن إجراؤها في نفس الاتجاه أو في اتجاهات مختلفة.
 أرز. 22. تصميم محور التأرجح للاهتزاز مما يسمح
أرز. 22. تصميم محور التأرجح للاهتزاز مما يسمح
تنظيم موقفها.
على التين. يوضح الشكل 23 تصميم الجهاز المدمج في الروك ، والذي يسمح لك بضبط موضعه الزاوي بسلاسة بالنسبة للمحور المثبت عليه. يتكون هذا الجهاز ، المدمج في ذراع الروك 1 ، والذي يتم توصيله بشكل محوري عن طريق المحور 2 بقضيب القيادة لآلية الرافعة ، من عجلة دودة 3 موجودة في تجويف ذراع الكرسي الهزاز مع خطوطها الداخلية 4 جهات اتصال السطح المحدود للمحور 14 ، ويتعامل أيضًا مع الدودة 5 المثبتة في تجويف الروك ، بشكل عمودي على محور العجلة الدودية. في نفس الوقت ، دبوس الأيمن من الدودة 5 بنهاية سداسية 6 في الغطاء 10 ، من خلال مجموعة بكرات 9 ، ملامسات مع جلبة 8 ، على الطرف الأيسر منها يتم تطبيق أسنان مخروطية 7 ، على اتصال مع أسنان التزاوج مصنوعة على الدودة 5 ، وتشكل خطوبة. يتلامس الطرف الأيسر من الدودة 5 ذات الفتحة المركزية المخروطية مع سطح العداد للغسالة المرنة 12 ، والتي يتم ضغطها بواسطة الزنبرك 11 والغطاء 13.
يتم ضبط الوضع الزاوي لذراع الروك 1 بالنسبة للمحور 14 على النحو التالي. لتدوير ذراع الروك 1 في اتجاه أو آخر ، يتم تدوير الدودة 5 للرأس السداسي 6 بمفتاح ربط في الاتجاه المطلوب ، بينما يتم نقل دورانها إلى العجلة الدودية 3 ، والتي يتم تثبيتها عن طريق شريحة الاتصال على العمود 14 ، يظل ثابتًا ، ويدور ذراع الروك 1 في الاتجاه المطلوب.الجانب ، ويغير موضعه الزاوي بالنسبة إلى المحور 14.
أرز. 23. هزاز مع جهاز مدمج لتعديله
موقف الزاوي.
الأدب.
1. Ignatiev N.P. أساسيات تصميم آزوف 2011.
2. Ignatiev N. P. "تصميم الآليات" آزوف 2015
تستخدم المقالة معلومات من الأقسام ذات الصلة من عمل المؤلف " أساسيات التصميم »نشرت عام 2011 وعمل المؤلف "تصميم الآليات"تم نشره في عام 2015
في دليل مرجعي "تصميم الآليات"بالإضافة إلى أمثلة لتصميم الرافعات وأذرع الروك ، فهي تحتوي على:
- تصميم أمثلة وتوصيات لاستخدام آليات الكام وآليات العمل المتقطعة والآليات المشتركة ،
- أمثلة على التصميم والتوصيات لاستخدام الأنواع الرئيسية لأجزاء الآليات المذكورة أعلاه: أعمدة الكرنك ، وقضبان التوصيل ، والمنزلقات ، والكاميرات ومفاصلها الدوارة ،
- توصيات لاختيار نوع محرك الآلية وأمثلة على تنفيذها ،
- حسابات الآليات ،
- مثال على إنشاء مخطط دائري لتشغيل آلة كام أوتوماتيكية ،
- تقنية تصميم الآليات ،
- توصيات لتحديد متطلبات الدقة للآليات وأجزائها النموذجية ،
- مثال على تصميم آلية
لشراء النسخة الكاملة من المقال ، قم بإضافته إلى السلة ،
تكلفة النسخة الكاملة من المقال 50 روبل.