Descrição do produto
Mecanismos de alavanca, parte 6 Alavancas e balancins
Nos mecanismos de manivela, alavancas, balancins ou corrediças são utilizadas como elo de saída, ou como elo intermediário, que, ao contrário de um controle deslizante que se move translacionalmente, realizam um movimento de balanço em relação ao eixo que os conecta à estrutura. Porém, ao realizar o mesmo tipo de movimento, alavancas, balancins e balancins podem ter designs completamente diferentes, que dependem, em primeiro lugar, da finalidade e da área de aplicação, ou melhor, do campo de tecnologia em que a alavanca ou mecanismo de manivela que inclui esses links é usado.
Braço de alavanca- trata-se de um elo de um mecanismo de alavanca que, sendo montado de forma articulada em um eixo fixo, realiza um movimento de balanço em relação a ele, sendo acionado na maioria das vezes por uma biela ou biela, à qual também está conectado de forma articulada.
Balancim- Esta é uma alavanca de braço único montada em um eixo fixo e acionada por uma biela ou biela.
Alavancas
As alavancas não são menos comuns que os virabrequins, as bielas e os controles deslizantes são utilizados em mecanismos de alavanca, pois permitem não só garantir que o mecanismo cumpra sua finalidade funcional, sendo seu elo de saída, mas além disso, sendo seu elo intermediário, permitem você alterar a magnitude e a direção do movimento transmitido e, em alguns casos, transferi-lo para um plano paralelo ou perpendicular.
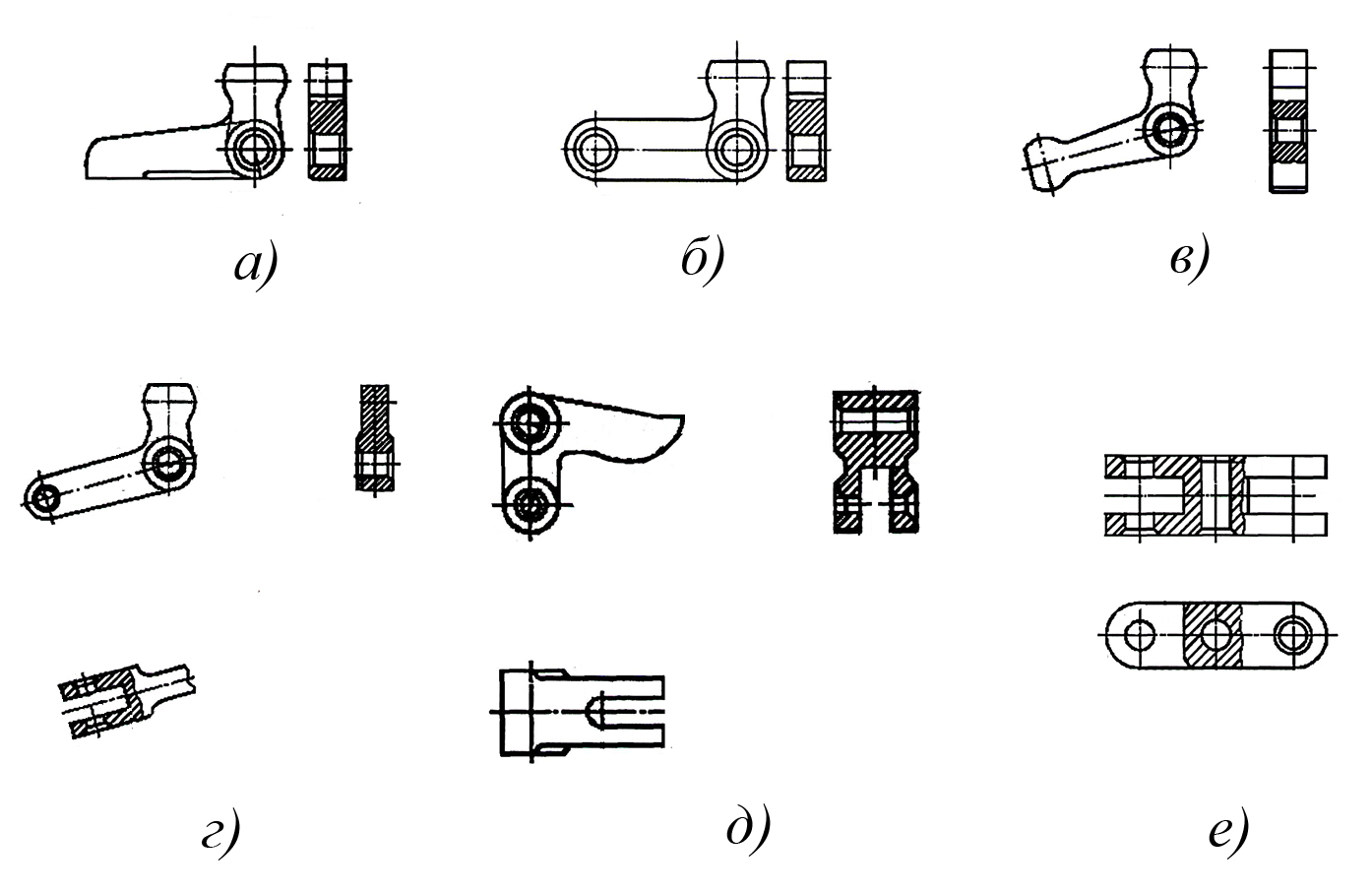
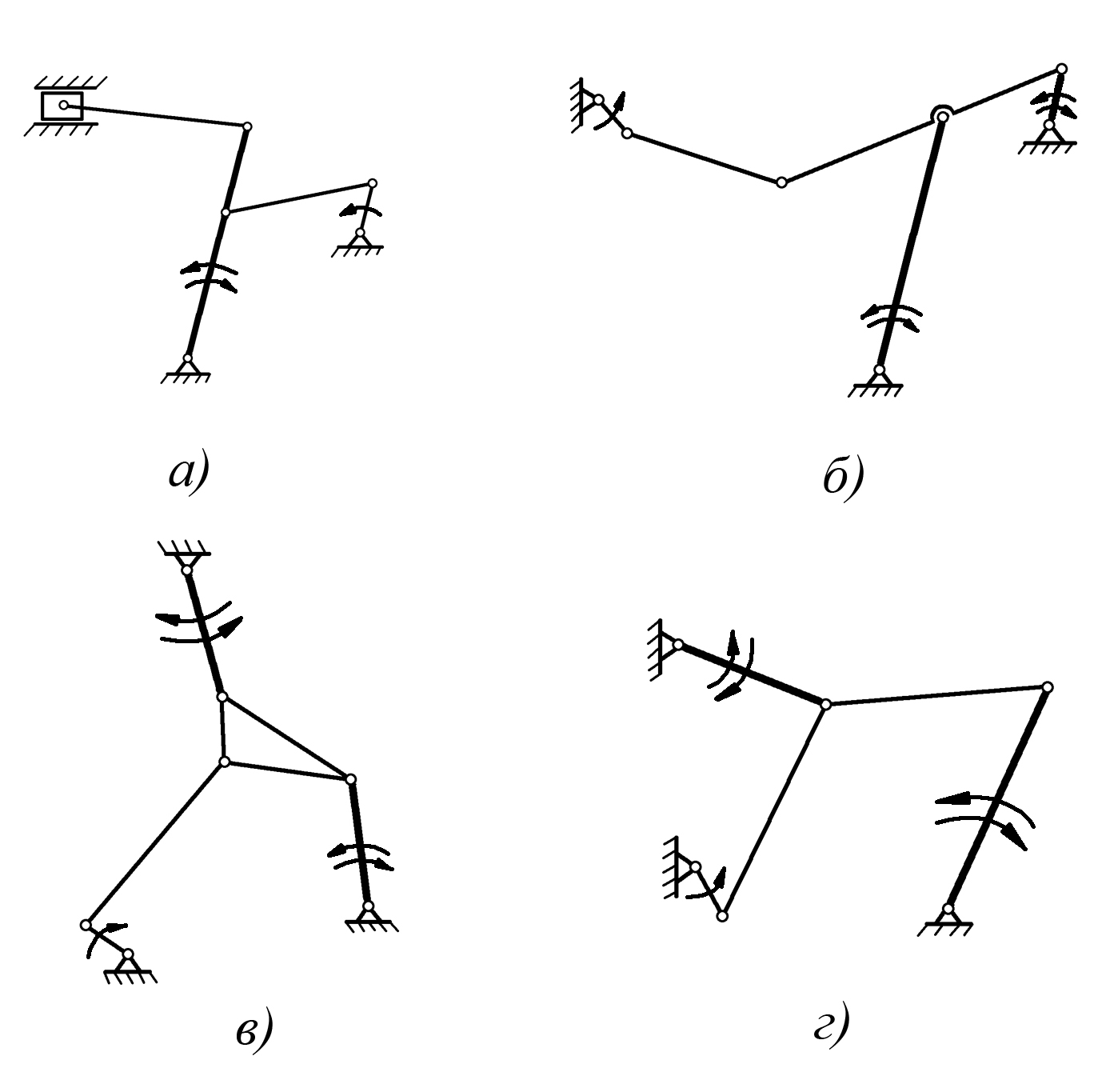
Na Fig. A Figura 1 mostra o projeto de vários tipos de alavancas, mais utilizadas na engenharia mecânica. Na Fig. 1 A mostra o desenho de uma alavanca de braço duplo, os furos para conectá-la aos elos acionador e acionado estão localizados em um lado do eixo de sua oscilação. Na Fig. 1 b mostra o desenho de uma alavanca de braço duplo, os orifícios para conectá-la aos elos acionador e acionado estão localizados em lados diferentes do eixo de sua oscilação. Na Fig. 1 V mostra o desenho de uma alavanca de braço duplo, os orifícios para conectá-la aos elos acionador e acionado estão localizados em ângulo entre si e em lados diferentes do eixo de seu giro. Na Fig. 1 G mostra o desenho de uma alavanca de três braços, os orifícios para conectá-la aos elos acionador e acionado estão localizados em ângulo entre si e em lados diferentes do eixo de seu giro. Na Fig. 1 d mostra o desenho de uma alavanca de braço duplo, os orifícios para conectá-la aos elos acionador e acionado estão localizados em ângulo entre si e localizados em um lado do eixo de seu giro, e os braços acionador e acionado são feitos na forma de um único elemento. Na Fig. 1 e mostra o desenho de uma alavanca de braço duplo de um mecanismo de alavanca fortemente carregado, no qual os ombros acionados, localizados no lado oposto do eixo de giro da alavanca em relação ao eixo do furo no braço acionado, transmitem movimento a dois hastes acionadas. Na Fig. 1 e mostra uma alavanca de braço duplo em que os braços motriz e acionado, posicionados em ângulo entre si, são feitos de furos, cujos eixos são perpendiculares ao eixo de giro da alavanca. Na Fig. 1 E mostra o desenho de uma alavanca de braço duplo, que possui estrutura pré-fabricada e é composta por braços acionadores e acionados feitos em forma de peças separadas rigidamente fixadas ao eixo por meio de conexões terminais apertadas com parafusos, enquanto a presença de um eixo que fornece deslocamento axial dos braços da alavanca, permite que a alavanca transmita movimento em planos paralelos. Na Fig. 1 Para mostra o desenho de uma alavanca de braço duplo, que tem finalidade semelhante ao exemplo anterior (deslocamento do movimento transmitido em um plano paralelo), mas é feita em versão fundida e possui um cubo central alongado em cujo orifício existe são rolamentos nos quais a alavanca é montada em um eixo fixado à estrutura.
Arroz. 1. O design das alavancas é o mais
frequentemente usado em engenharia mecânica.
As alavancas mostradas na Fig. 1 A–1w feitos por soldagem, geralmente são utilizados em produção individual e em pequena escala. Na produção em larga escala e em massa, as alavancas são feitas por estampagem ou fundição. Na Fig. A Figura 2 mostra o projeto das alavancas fundidas. Na Fig. 2 A uma alavanca fundida usada em um swashplate de hélice de helicóptero, e na Fig. 2 b alavanca fundida usada na suspensão de um carro de passeio.
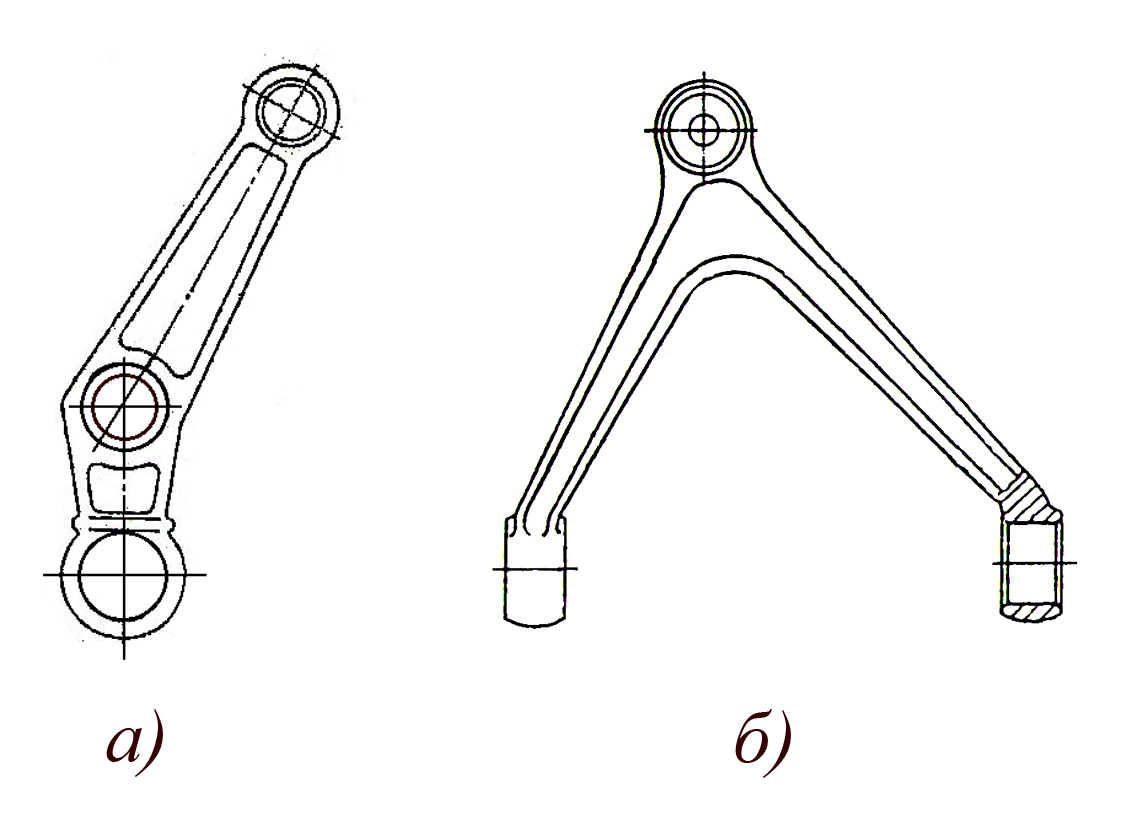 Arroz. 2. Projeto de alavanca fundida
Arroz. 2. Projeto de alavanca fundida
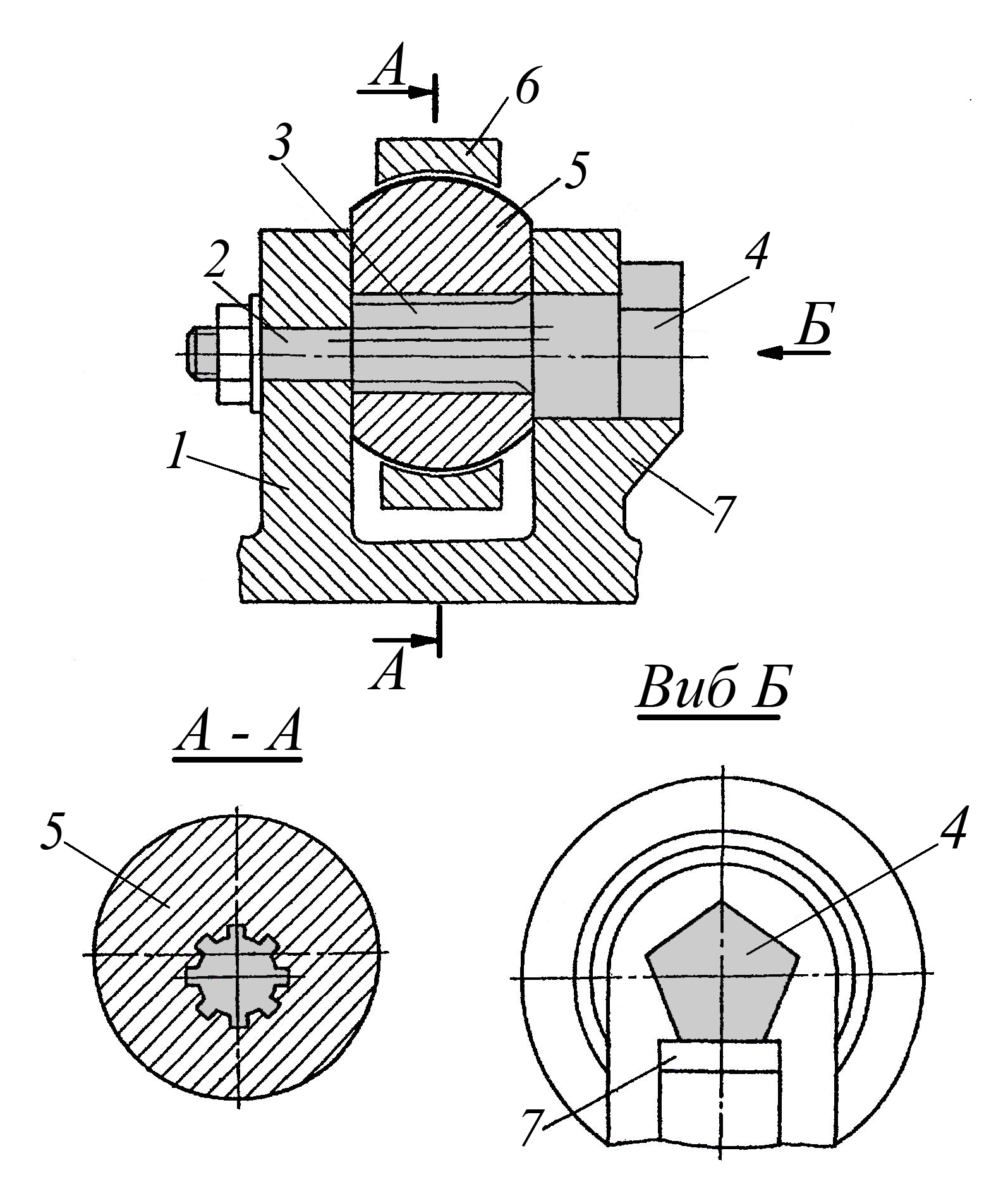
Em alguns casos, as alavancas são utilizadas como elo intermediário, permitindo a transferência do movimento com deslocamento para um plano paralelo. Na Fig. 3 A mostra um desenho de alavanca em que, para este fim, os braços motriz e acionado são paralelos entre si e deslocados por uma certa distância. Neste caso, a alavanca 1 nos mancais deslizantes 2 é montada de forma articulada em um eixo 3 montado na parte do corpo 4, enquanto os eixos 5 e 6 localizados nos orifícios dos braços acionador e acionado da alavanca a conectam com o correspondente elos do mecanismo de alavanca no qual a alavanca está incluída. Para o posicionamento preciso da alavanca 1, os anéis de ajuste 7 são instalados no eixo 3, e a alavanca é travada no eixo pelo anel de travamento 8.
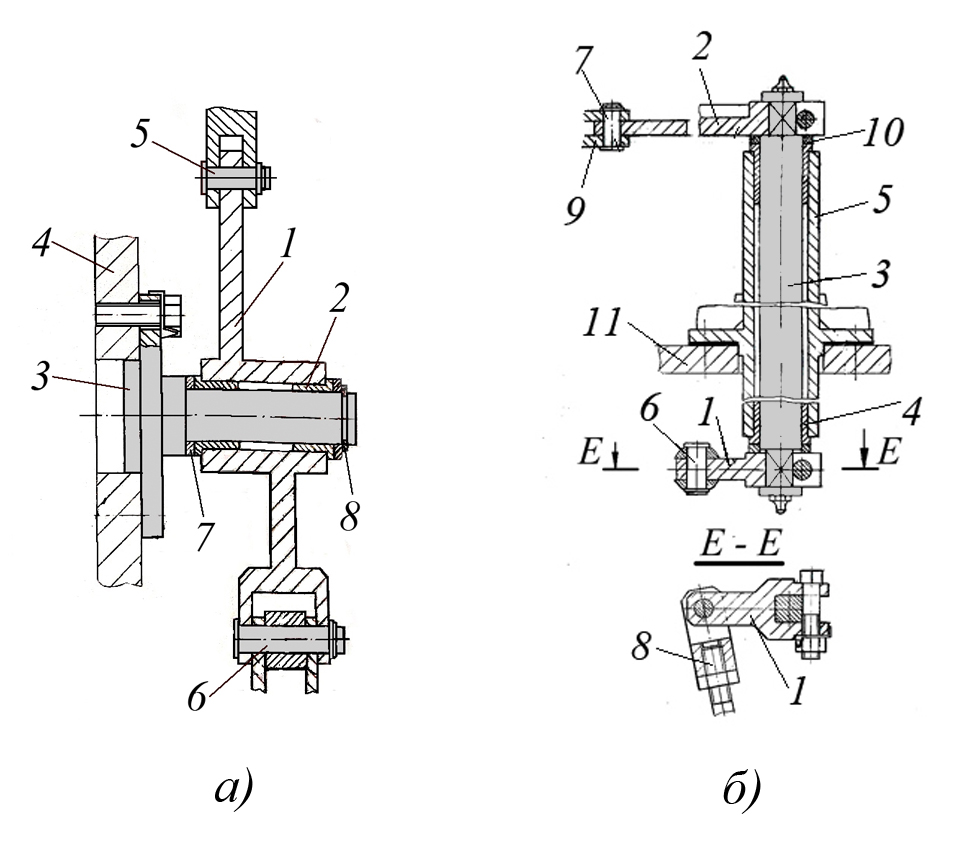 Arroz. 3. Projeto de alavancas cujos braços são paralelos entre si
Arroz. 3. Projeto de alavancas cujos braços são paralelos entre si
entre si e deslocados por uma certa distância.
Na Fig. 3 b mostra o desenho de uma alavanca pré-fabricada composta por braços acionadores 1 e acionados 2, que são rigidamente fixados ao eixo 3 por meio de conexões terminais. O rolo 3 nos mancais deslizantes 4 é instalado no orifício do suporte 5, montado na estrutura do equipamento tecnológico 11. O braço motriz 1 da alavanca é conectado de forma articulada à haste motriz 8 por meio de um eixo 6, e o braço acionado 2 da alavanca é conectado de forma articulada à ligação acionada 9 do mecanismo de alavanca por meio de um eixo 7. A posição do rolo 3 em relação ao suporte 5 é garantida pelos anéis de ajuste 10.
 Arroz. 4. Projeto de alavancas pré-fabricadas.
Arroz. 4. Projeto de alavancas pré-fabricadas.
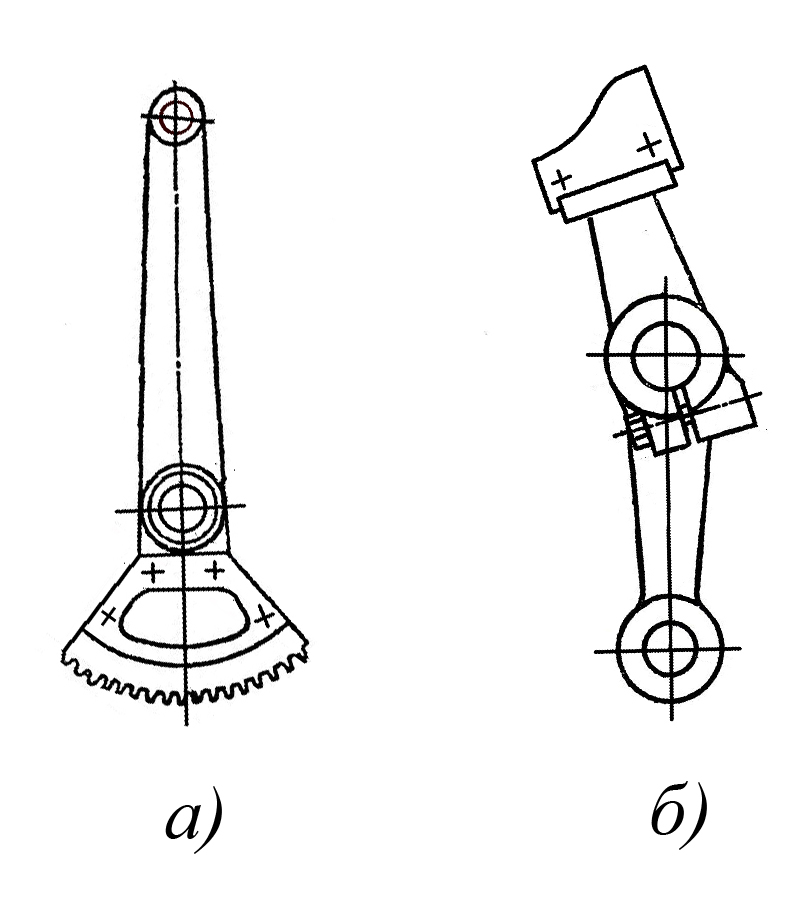
Em equipamentos automáticos, os mecanismos de ligação são frequentemente usados em conjunto com elementos de engrenagem e mecanismos de came, e podem incluir alavancas montadas. Na Fig. A Figura 4 mostra opções de design para tais alavancas. Na Fig. 4 A mostra o desenho de uma alavanca pré-fabricada composta pela própria alavanca e um setor de engrenagem acoplado a ela. Na Fig. 4 b mostra o projeto de uma alavanca pré-fabricada que consiste em uma alavanca e um came plano preso a ela. Em ambos os casos, para uma fixação confiável e precisa do setor de engrenagem e do came na alavanca, são fornecidas superfícies de centralização e base adequadas.
 Arroz. 5. Projeto de alavancas utilizadas em dispositivos de usinagem.
Arroz. 5. Projeto de alavancas utilizadas em dispositivos de usinagem.
Alavancas de vários designs são amplamente utilizadas em dispositivos de usinagem. Na Fig. A Figura 5 mostra opções para projetos de alavancas padronizados usados em dispositivos de usinagem:
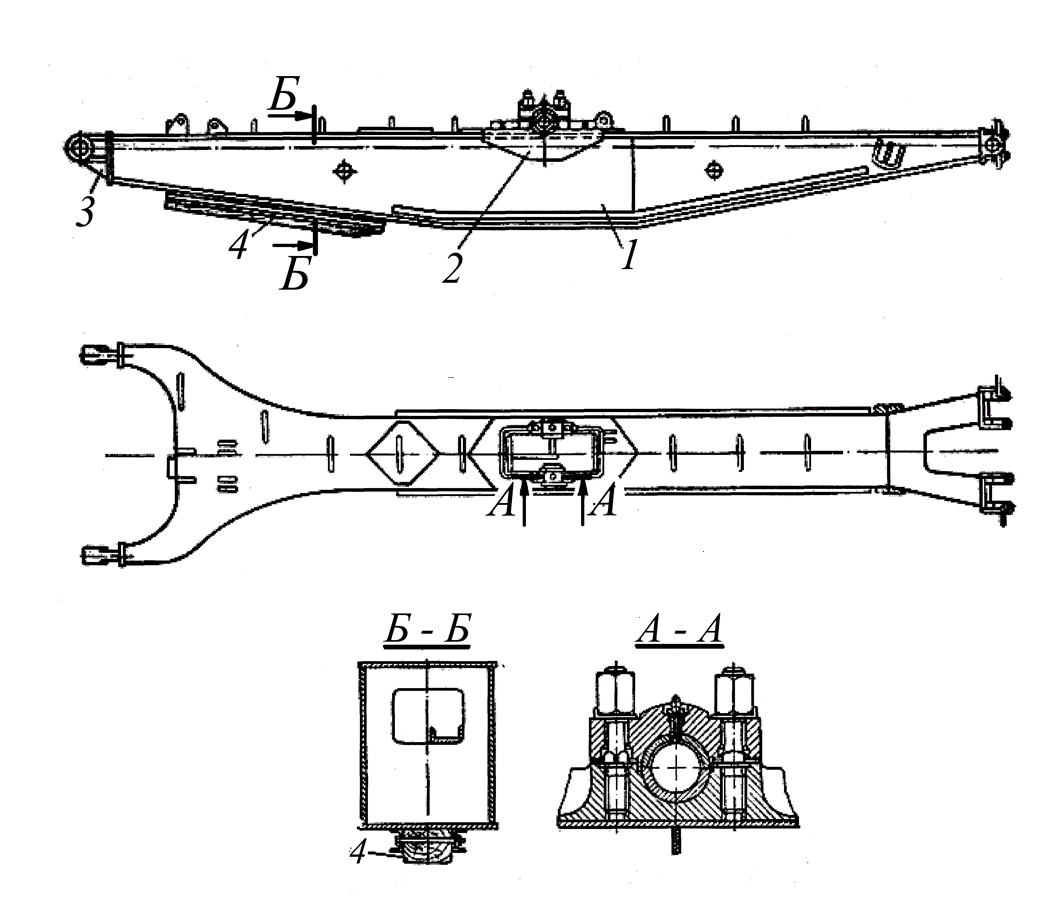
Os mecanismos de alavanca são amplamente utilizados em equipamentos de construção e rodoviários (guindastes, escavadeiras, tratores), neste caso, as alavancas incluídas em sua composição têm dimensões gerais de vários metros a dezenas de metros e, portanto, são feitas por soldagem. Na Fig. A Figura 6 mostra o projeto de uma lança de escavadeira soldada, que consiste em uma viga 1, um suporte 2 para instalação do eixo do mancal da sela, um amortecedor 3 e um calcanhar 4.
 Arroz. 7. Estruturas de borracha-metal
Arroz. 7. Estruturas de borracha-metal
juntas articuladas.
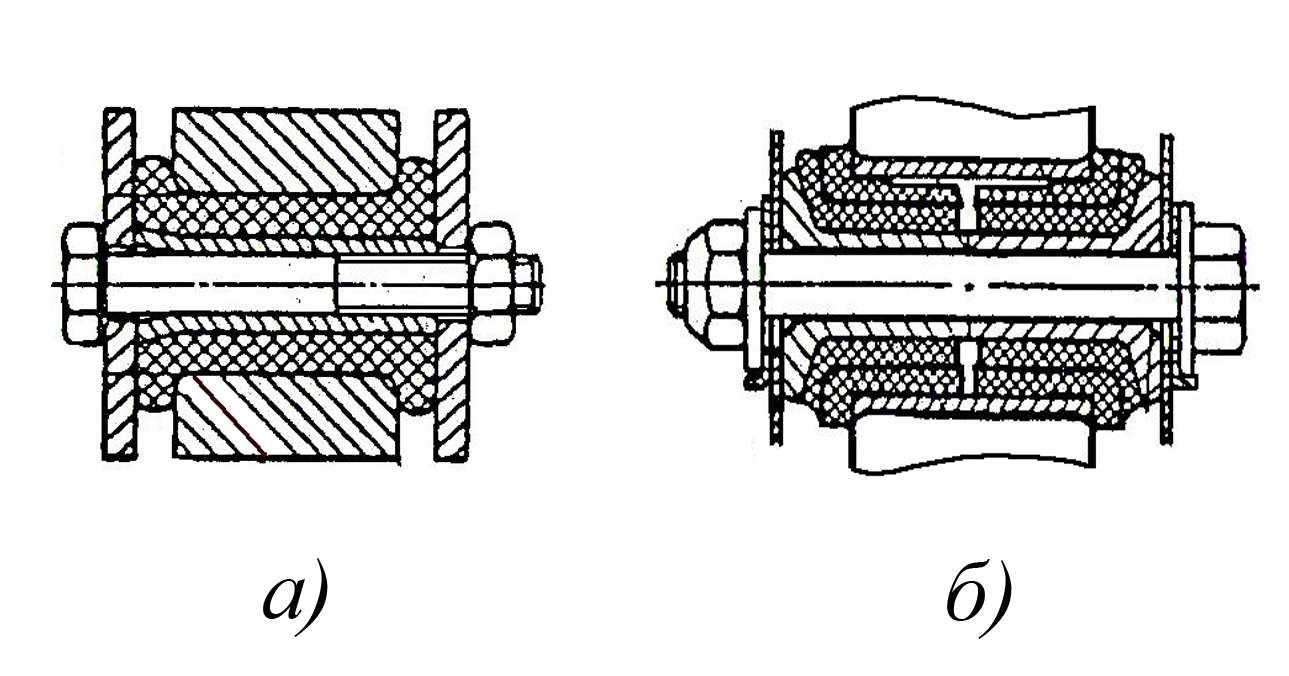
Nas juntas articuladas das alavancas com bielas e bielas, são utilizados rolamentos deslizantes e de rolamento, rolamentos de agulha, juntas esféricas originais e padrão, cujos designs são discutidos no artigo “Juntas articuladas”. Em alguns casos, as juntas articuladas de alavancas com biela ou biela sofrem não apenas forças laterais, mas também trabalham em torção, o que ocorre, por exemplo, nas juntas articuladas de alavancas com bielas na suspensão de um carro. Nestes casos, são utilizadas dobradiças de borracha-metal (ver Fig. 7).
 Arroz. 8. Opções para montagem de alavancas no eixo.
Arroz. 8. Opções para montagem de alavancas no eixo.
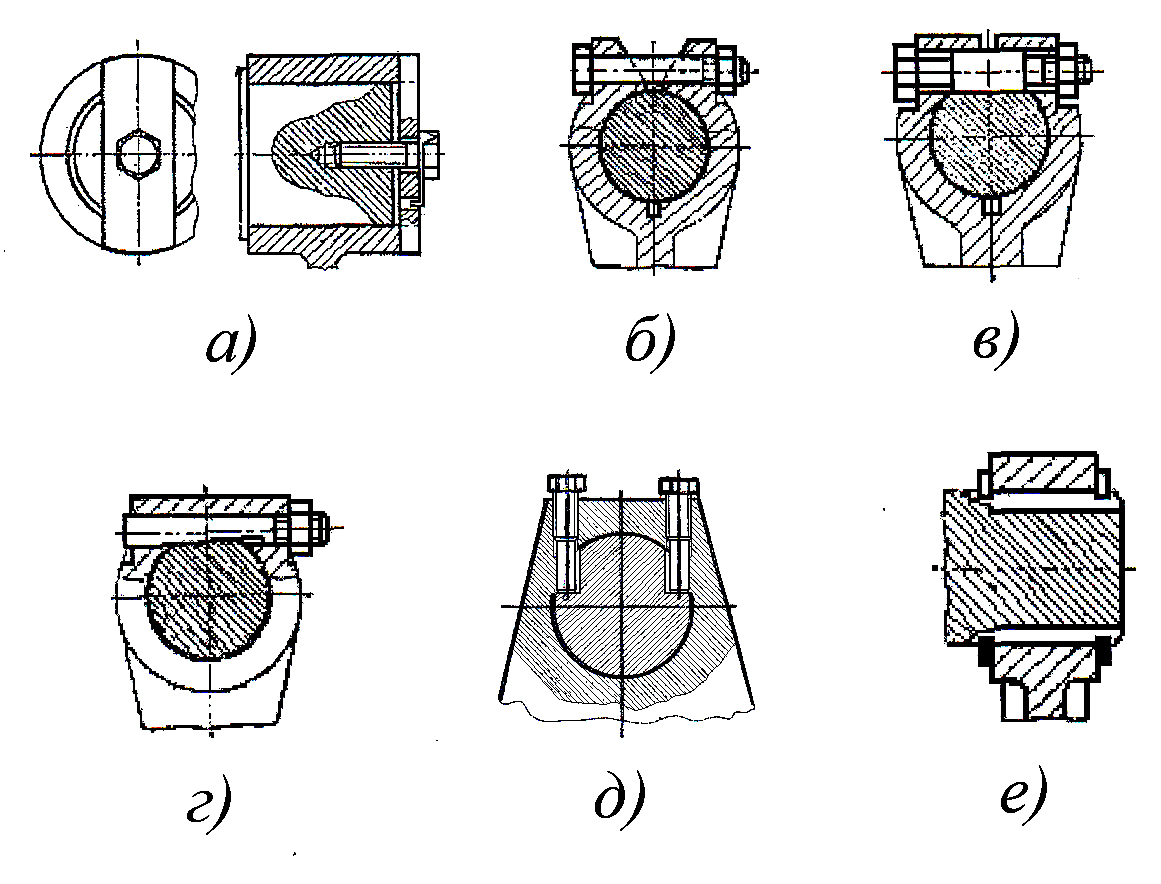
Um elemento importante que determina em grande parte não apenas a vida útil do mecanismo de alavanca, mas muitas vezes seu desempenho é a conexão da alavanca ao eixo , transmitindo torque para ele. Esta conexão deve garantir a eliminação de folgas, desgaste prematuro ou colapso das superfícies de contato durante a operação, bem como a simplicidade e comodidade de sua desmontagem e montagem. Exemplos de tais conexões são mostrados na Fig. 8. Na Fig. 8 A mostra a montagem da alavanca no eixo, na qual o torque é transmitido através de uma chaveta combinada com uma arruela. Esta fixação é utilizada em mecanismos de alavanca que operam em baixas velocidades e cargas alternadas. Neste caso, a chave final geralmente é feita de aço 45 e submetida a endurecimento até uma dureza de unidades HRC 35-40, é instalada no eixo e na alavanca para encaixe H11/d11. A conexão é simples de fabricar e confiável na operação. Na Fig. 8 bé mostrada a conexão terminal do eixo com a alavanca, na qual a transmissão do torque é realizada devido às forças de atrito entre a superfície externa do eixo e o orifício da alavanca, criadas quando ela é apertada com um parafuso de acoplamento. Para melhor compressão do eixo, uma ranhura central é fresada na alavanca. A conexão, assim como a anterior, é utilizada em mecanismos que operam em baixas velocidades e cargas alternadas. Na Fig. 8 V mostra uma conexão na qual o grampo terminal do eixo é combinado com sua fixação por meio de um parafuso, cuja seção intermediária é mais precisa do que no caso usual e é firmemente pressionada contra a superfície de contato da ranhura cilíndrica aberta feita no eixo. Tal parafuso é feito de aço 45 e é aquecido a uma dureza de 35 a 40 unidades HRC, e sua seção intermediária é assentada no eixo de acordo com H11/d11. A conexão pode ser usada para transmitir torques significativos. Para transmitir momentos médios e permitir um leve ajuste angular da posição da alavanca em relação ao eixo, a conexão mostrada na Fig. 8 d. Nele, o torque é transmitido por meio de forças de atrito entre o eixo e a alavanca, que são criadas apertando dois parafusos de ajuste e pressionando esses parafusos nas partes planas do eixo. Neste projeto de conexão, a parte do eixo do parafuso em contato com o eixo também é endurecida a uma dureza de 35–40 unidades HRC. Na Fig. 8 G mostra uma conexão na qual a transmissão do torque do eixo para a alavanca é realizada por meio de um eixo em cunha, que fixa a alavanca pelo contato com uma contraplana feita no eixo. Esta conexão é utilizada em mecanismos de alavanca que operam em altas velocidades e cargas. Nos mecanismos de alavanca operando em condições de cargas dinâmicas alternadas com velocidades significativas, sua conexão ao eixo é realizada por meio de uma conexão estriada evolvente centrada na superfície lateral, mostrada na Fig. 8 e. As estrias internas da alavanca são feitas por tração, portanto, na produção individual ou em pequena escala de tais conexões de alavancas com o eixo, o uso de estrias envolventes pode não ser economicamente justificado.
Para atender aos requisitos específicos dos mecanismos de alavanca, que incluem alavancas e dependendo principalmente do campo de tecnologia em que são utilizados, e independentemente de serem uma saída ou um elo intermediário, vários dispositivos adicionais podem ser incorporados neles permitindo:
- proteger o mecanismo contra sobrecargas,
- ajuste o comprimento dos braços de alavanca,
- ajuste a posição angular da alavanca.
Vejamos alguns exemplos de tais dispositivos embutidos em alavancas.
 Arroz. 9. Projeto de segurança
Arroz. 9. Projeto de segurança
dispositivos embutidos na alavanca facilmente
mecanismo carregado.
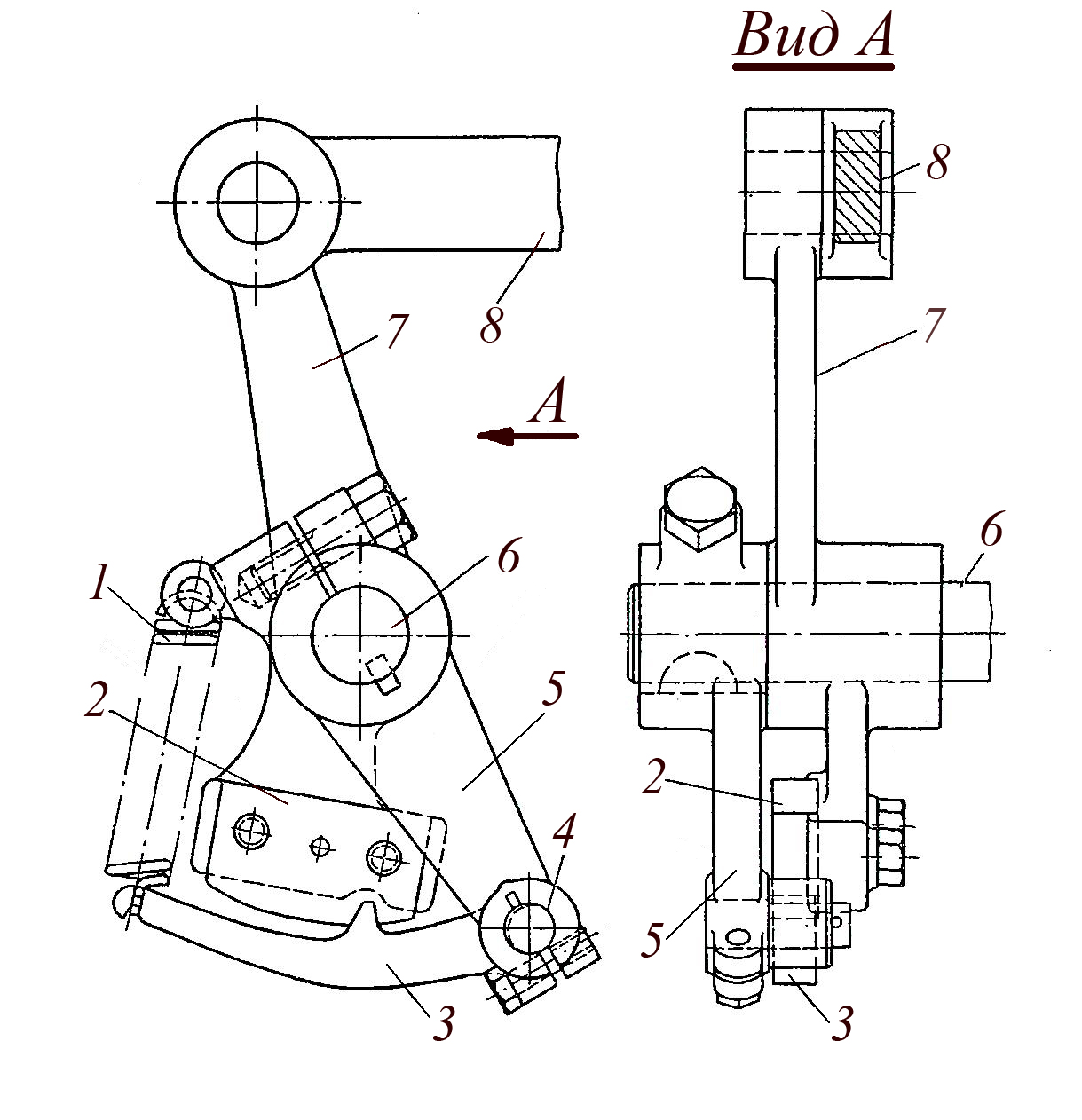
Na Fig. 9 mostra o desenho do dispositivo de segurança embutido na alavanca de um mecanismo levemente carregado, que garante o término da transmissão do movimento pela alavanca quando mais do que a força permitida é aplicada à sua parte acionada. Ele contém um eixo 6, no qual a alavanca 7 é montada de forma articulada, também conectada de forma articulada à biela 8, a alavanca 5 é fixada rigidamente ao eixo 6 por meio de conexões de chaveta e terminais, enquanto a alavanca 5 é conectada de forma articulada a a trava 3, constantemente pressionada pela mola tensora 1, na placa 2, fixada na alavanca 7. O contato da trava 3 com a placa 2 é feito por meio de um dente que entra na cavidade correspondente. Se uma força aumentada atua na biela 8, a mola 1 se estica e o dente de trava 3 sai da cavidade da placa 2 e o movimento da alavanca 5 para a alavanca 7 não é transmitido, enquanto a alavanca 5, sendo fixado no eixo, continua a balançar. Depois que a ação da força aumentada cessa, o dente da trava 3 entra novamente livremente na ranhura da placa 2 e a alavanca 7 começa a se mover com a alavanca 5 como um todo, enquanto transmite o movimento para a biela 8.
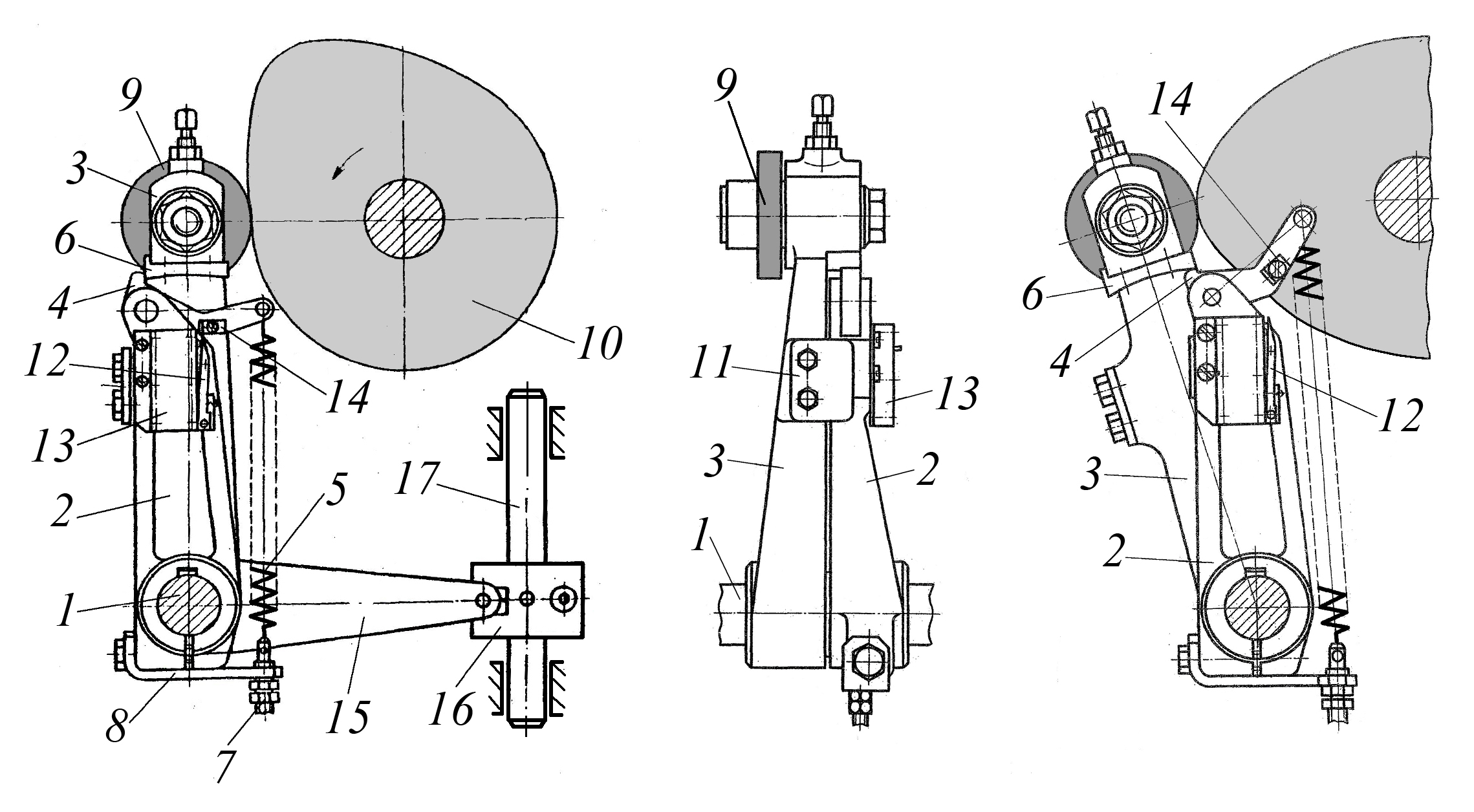 Arroz. 10. Fusível de força embutido na alavanca do mecanismo de came.
Arroz. 10. Fusível de força embutido na alavanca do mecanismo de came.
Na Fig. 10 mostra o desenho do dispositivo de segurança embutido na alavanca pré-fabricada de dois braços, que é o empurrador do mecanismo de came. Contém uma alavanca pré-fabricada de dois braços fixada no eixo 1, composta por um balancim 3 com um rolete 9 em contato com o came 10 e uma alavanca de dois braços 2, cujo braço motriz possui uma saliência 4 pressionada pelo a mola 5 ao batente 6 do balancim 3, e o braço acionado 15 da alavanca 2 é conectado de forma articulada ao alojamento 16 montado na haste acionada 17. Na alavanca 2 há um microinterruptor 13 em contato com a alavanca de comutação 12, bem como um batente 14 que tem a capacidade de interagir com a alavanca de comutação 12. O rolo 9 do balancim 3 é constantemente pressionado contra o came 10 por meio de uma mola (não mostrada na Fig. 193), e a interação de o balancim 3 com a alavanca de braço duplo 2, quando o balancim é girado no sentido horário, é realizado através da barra 11.
O dispositivo funciona da seguinte maneira. Durante a operação normal do mecanismo (na ausência de sobrecargas), o came 10 através do rolo 9 transmite um movimento de balanço ao balancim 3, que, ao entrar em contato com seu batente 6 com a saliência 4 da alavanca de braço duplo 2, transmite a este último um movimento de balanço, e seu braço acionado 15 interage com o corpo 16 montado na haste 17, dando-lhe um movimento para frente (a barra faz um curso de trabalho). Quando o balancim 2 gira no sentido horário, o movimento da alavanca 3 é transmitido através da barra 11 e o braço acionado 15 da alavanca 2 informa a haste 17 para se mover na direção oposta (a haste faz um movimento ocioso), interagindo com através do corpo 16. Com esta posição relativa do balancim 3 e do braço dianteiro da alavanca 2, o batente 14 atua na alavanca do interruptor 12, que por sua vez fecha o microinterruptor 13. Quando a carga aplicada à haste 17 aumenta acima do permitido, ao realizar um curso de trabalho, este para junto com o corpo 16 e a alavanca de dois braços 2, e o came 10, continuando a girar no mesmo sentido, atua no rolo 9, e no balancim 3 , vencendo a força da mola 5, gira no sentido anti-horário. Como resultado, o batente 14 libera a alavanca de comutação 12 e esta desliga o microinterruptor 13, que ao mesmo tempo interrompe o acionamento da máquina através do sistema elétrico automático.
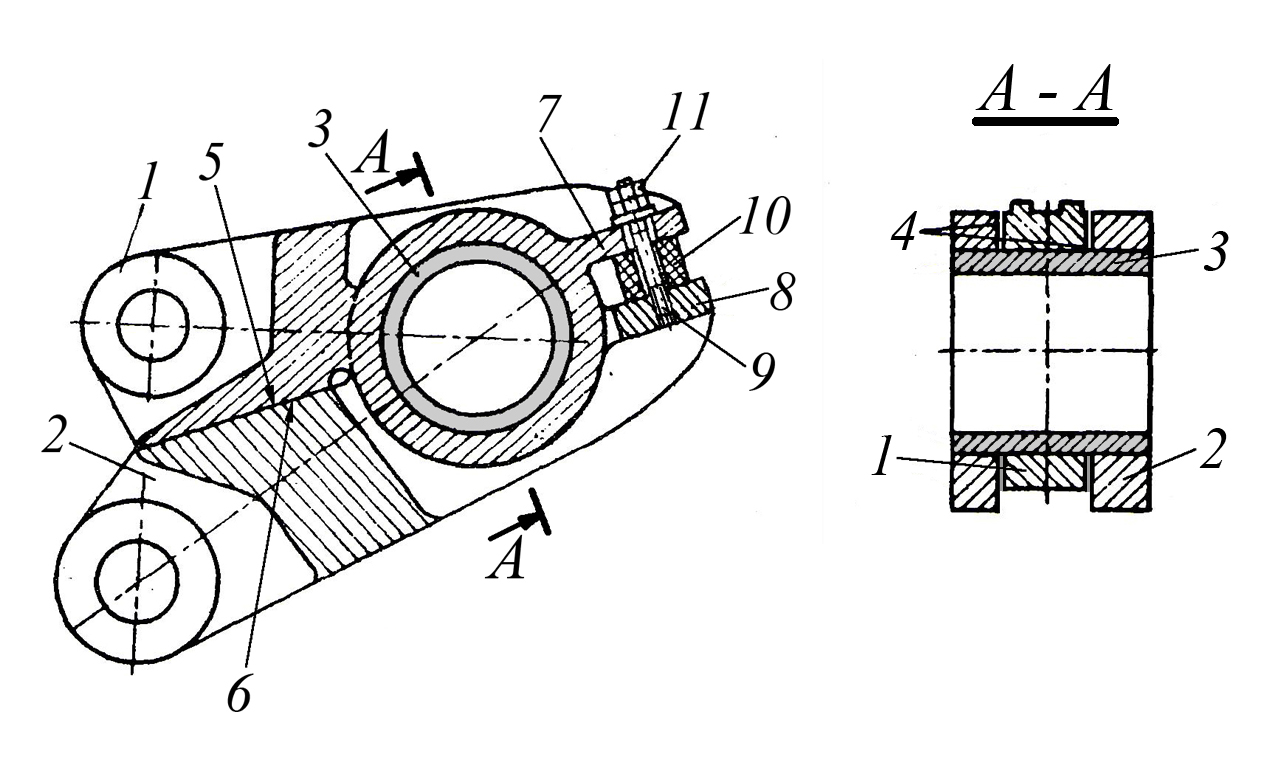 Arroz. 11. Projeto de uma alavanca pré-fabricada, que inclui um dispositivo de compensação de cargas dinâmicas.
Arroz. 11. Projeto de uma alavanca pré-fabricada, que inclui um dispositivo de compensação de cargas dinâmicas.
Na Fig. 11 mostra o desenho de uma alavanca pré-fabricada, que inclui um dispositivo para compensar cargas dinâmicas que atuam no sentido oposto à ação da força tecnológica transmitida pelo mecanismo de alavanca. Esta alavanca contém um braço motriz 1 e um braço acionado 2, conectados entre si por uma bucha deslizante 3, com o braço motriz 1 fixado fixamente à bucha e o braço acionado 2 girando sobre ela. Os anéis antifricção 4 são instalados entre as extremidades dos cubos dos braços 1 e 2. O contato dos braços 1 e 2 é feito ao longo das superfícies de apoio 5 e 6. Nas superfícies dos braços 1 e 2 da alavanca , são feitas as saliências 7 e 8, em cujos furos é instalado um pino 9, apertando as saliências com porcas 11 através de um inserto elástico 10 feito em forma de manga.
Durante a operação do mecanismo, que inclui uma alavanca pré-fabricada, a força tecnológica do braço motriz 1 para o braço acionado 2 é transmitida através das superfícies de suporte 5 e 6. Quando ocorrem cargas dinâmicas durante a operação do mecanismo na direção oposta a sob a ação da força tecnológica, o braço acionado 2 começa a se desprender com sua superfície 6 da superfície de apoio 5 da alavanca motriz 1 e ao mesmo tempo gira no sentido anti-horário em relação ao braço motriz 1. Como resultado, a inserção elástica 10, fixado entre as saliências 7 e 8, é comprimido e compensa o efeito da carga dinâmica no mecanismo, e também amortece efetivamente as vibrações resultantes das peças do mecanismo.
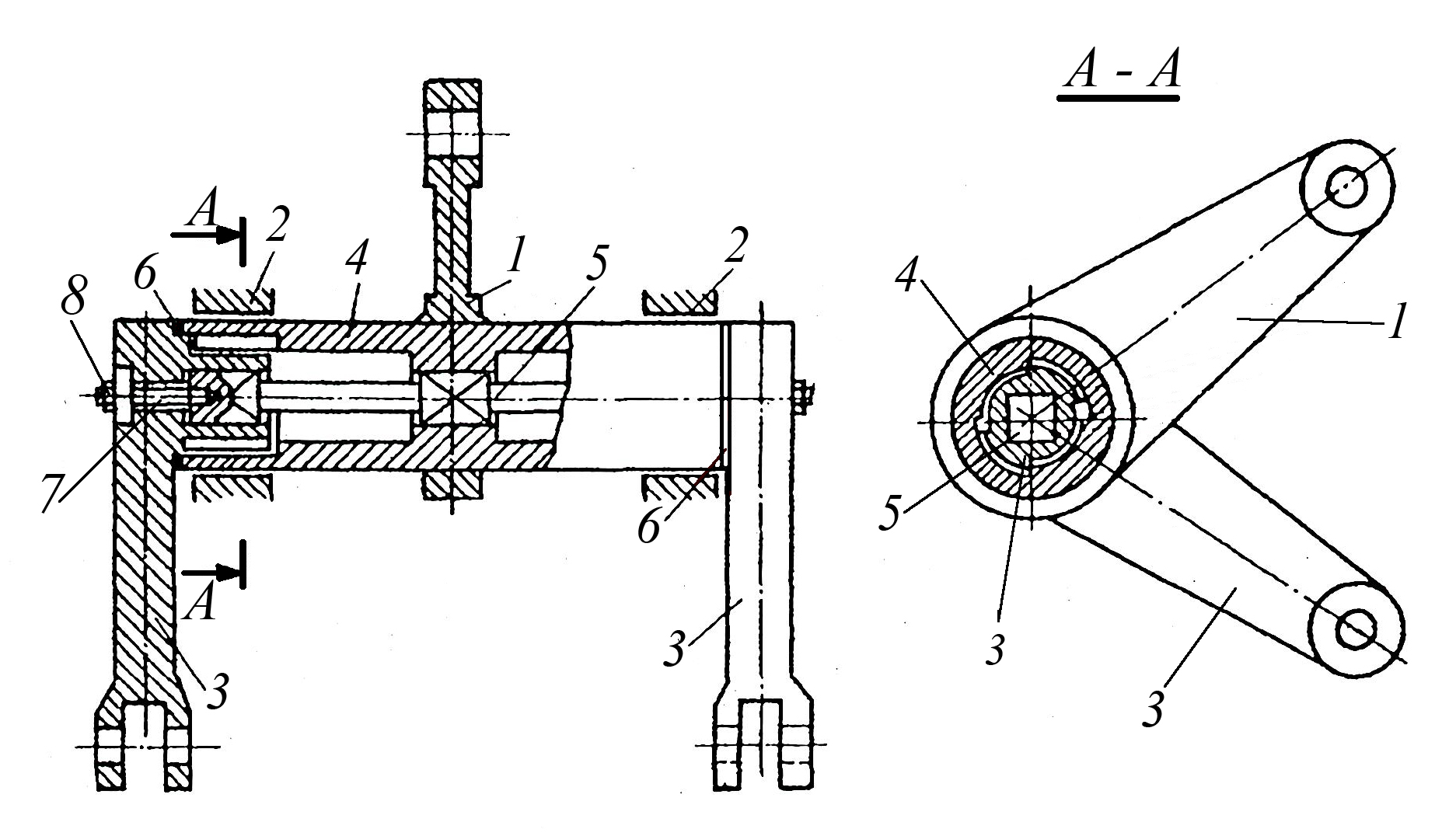 Arroz. 12. Projeto de uma alavanca pré-fabricada, que inclui um rolo de torção
Arroz. 12. Projeto de uma alavanca pré-fabricada, que inclui um rolo de torção
para compensar cargas dinâmicas.
Na Fig. 12 mostra o desenho de uma alavanca pré-fabricada, que inclui um rolo de torção para compensar as cargas dinâmicas que atuam no sentido oposto à ação da força tecnológica transmitida pelo mecanismo de alavanca. Esta alavanca é composta por um braço motriz 1, que está rigidamente conectado à luva 4, montado de forma articulada nos suportes 2 e em contato com dois braços de alavanca acionados 3 localizados em suas extremidades e conectados a ela por meio de um eixo de torção 5 localizado dentro a manga. Neste caso, os braços acionados 3 da alavanca através das juntas antifricção 6 são pressionados nas extremidades da bucha 4 por meio dos pinos 7 e porcas 8. Ambos os braços acionados 3 da alavanca de montagem são feitos com pinos que se encaixam no furo da bucha 4, enquanto os pinos possuem saliências radiais, e no furo da bucha 4 existem ranhuras de raio contrário que formam folgas com as extremidades das saliências radiais. Ao montar a alavanca como parte do mecanismo, o rolo de torção 5 é primeiro apertado de modo que a folga entre as extremidades das saliências radiais dos munhões dos braços acionados 3 e as extremidades das ranhuras radiais correspondentes da luva 4 seja selecionada quando entram em contato durante a transmissão da força tecnológica pela alavanca.
Durante a operação do mecanismo no qual a alavanca de montagem está incluída, a força tecnológica do braço motriz 1 através da bucha 4 e das extremidades de suas ranhuras radiais é transferida para as extremidades das saliências radiais nos munhões dos braços acionados 3 e estes últimos realizam um movimento de balanço, transmitindo-o ao link de saída do mecanismo. Quando ocorre uma carga dinâmica, atuando no sentido oposto à ação da força tecnológica, os braços acionados 3 passam a girar no sentido oposto e torcem adicionalmente o rolo de torção 5, cuja deformação elástica reduz o efeito das cargas inerciais sobre as peças do mecanismo.
 Arroz. 13. O projeto da alavanca montada de um mecanismo fortemente carregado com um dispositivo de segurança de força integrado.
Arroz. 13. O projeto da alavanca montada de um mecanismo fortemente carregado com um dispositivo de segurança de força integrado.
Os fusíveis à força incorporados nas alavancas considerados são do tipo recuperável, o que torna a sua utilização bastante eficaz, mas infelizmente a sua utilização é impossível em mecanismos de alavancas fortemente carregados. Fusíveis de força destrutíveis estão embutidos nas alavancas de mecanismos fortemente carregados. Mostrado na Fig. 13, a alavanca pré-fabricada com um dispositivo de segurança de força embutido contém um braço condutor 1 montado de forma articulada por meio de uma manga deslizante 2 em um eixo 3 rigidamente fixado à estrutura 4, enquanto o braço acionado 6 da alavanca também é montado de forma articulada no mesmo eixo 3 por meio de uma luva deslizante. Ambas as alavancas são conectadas por meio de um pino de cisalhamento 10 instalado nas buchas 7, 8 e 9 pressionado no furo da alavanca acionadora 1 e no furo da alavanca acionada 6. Se o a força transmitida pela alavanca montada excede o valor permitido, então o pino 10 é cortado e a conexão do braço acionado 1 com o braço principal 6 da alavanca é encerrada e isso evita danos a partes mais complexas e caras do mecanismo.
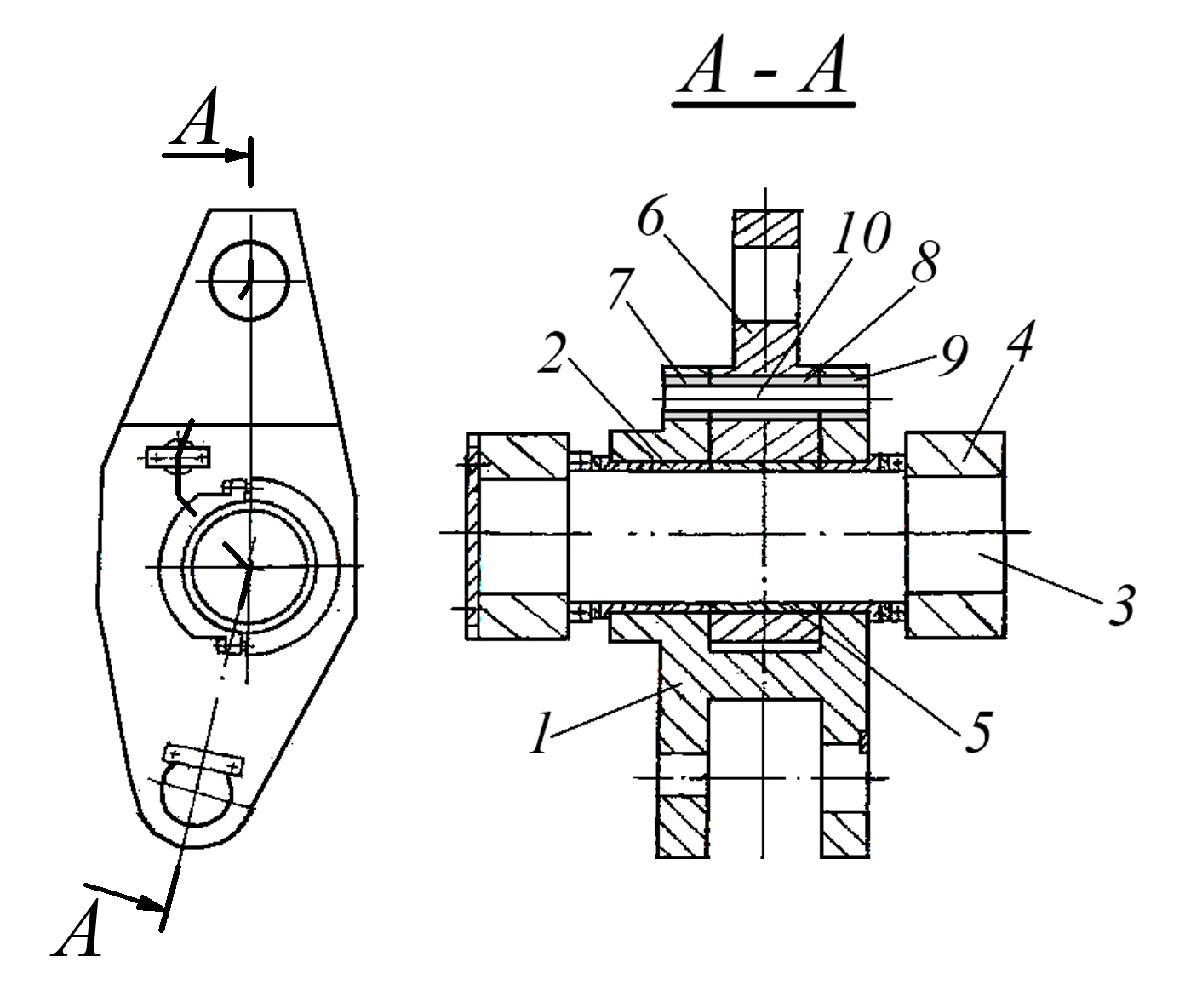
 Arroz. 14. Um dispositivo embutido na alavanca de uma articulação levemente carregada que permite ajustar o comprimento de seu braço principal.
Arroz. 14. Um dispositivo embutido na alavanca de uma articulação levemente carregada que permite ajustar o comprimento de seu braço principal.
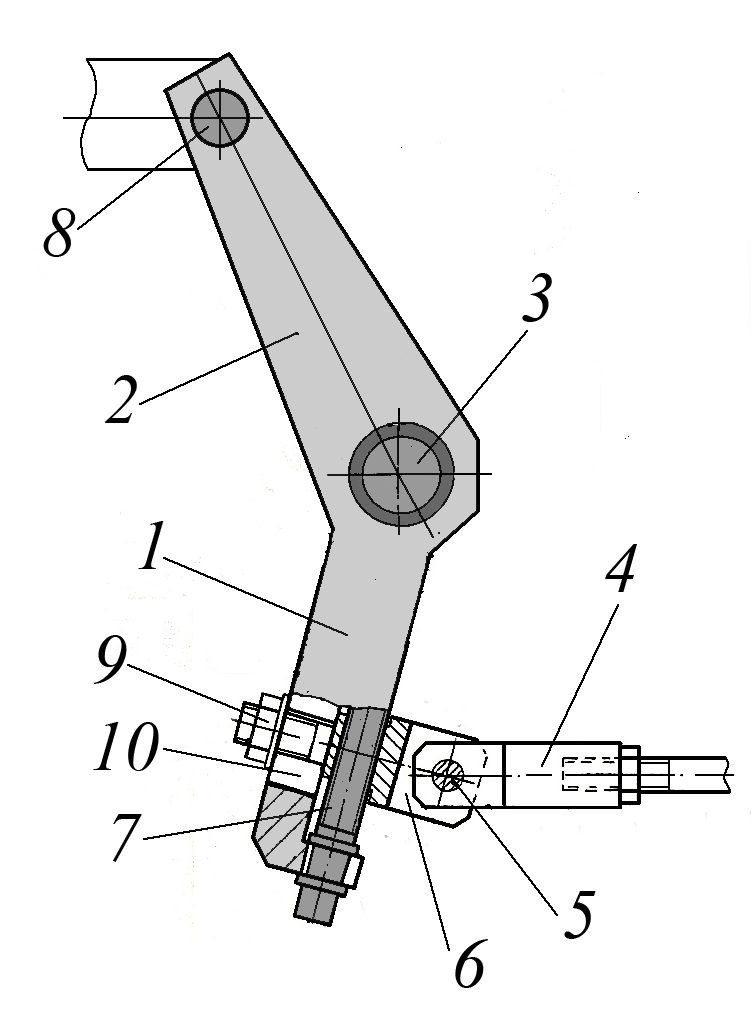
Na Fig. 14 mostra um dispositivo embutido no braço de uma articulação levemente carregada que permite o ajuste do comprimento do seu braço principal. Nesta alavanca, constituída pelos braços guia 1 e acionado 2 e montada no eixo 3, é embutido um dedo 6, conectado de forma articulada por meio do eixo 5 à haste de acionamento 4 e fixado na posição desejada na ranhura 10 com a ajuda de uma porca 9 e um parafuso de ajuste 7. Ao mesmo tempo, o braço acionado 2 da alavanca é conectado de forma articulada por meio do eixo 8 ao elo acionado do mecanismo de alavanca. Ao ajustar o comprimento do braço principal 1 da alavanca, a porca 9 é desparafusada, então o pino 6 é movido para um lado ou outro ao longo da ranhura do braço principal 1 da alavanca usando o parafuso de ajuste 7, e então o pino 6 é posteriormente travado com a porca 9.
 Arroz. 15. O design do dispositivo embutido na alavanca de uma articulação fortemente carregada, permitindo ajustar
Arroz. 15. O design do dispositivo embutido na alavanca de uma articulação fortemente carregada, permitindo ajustar
o comprimento de seu braço traseiro.
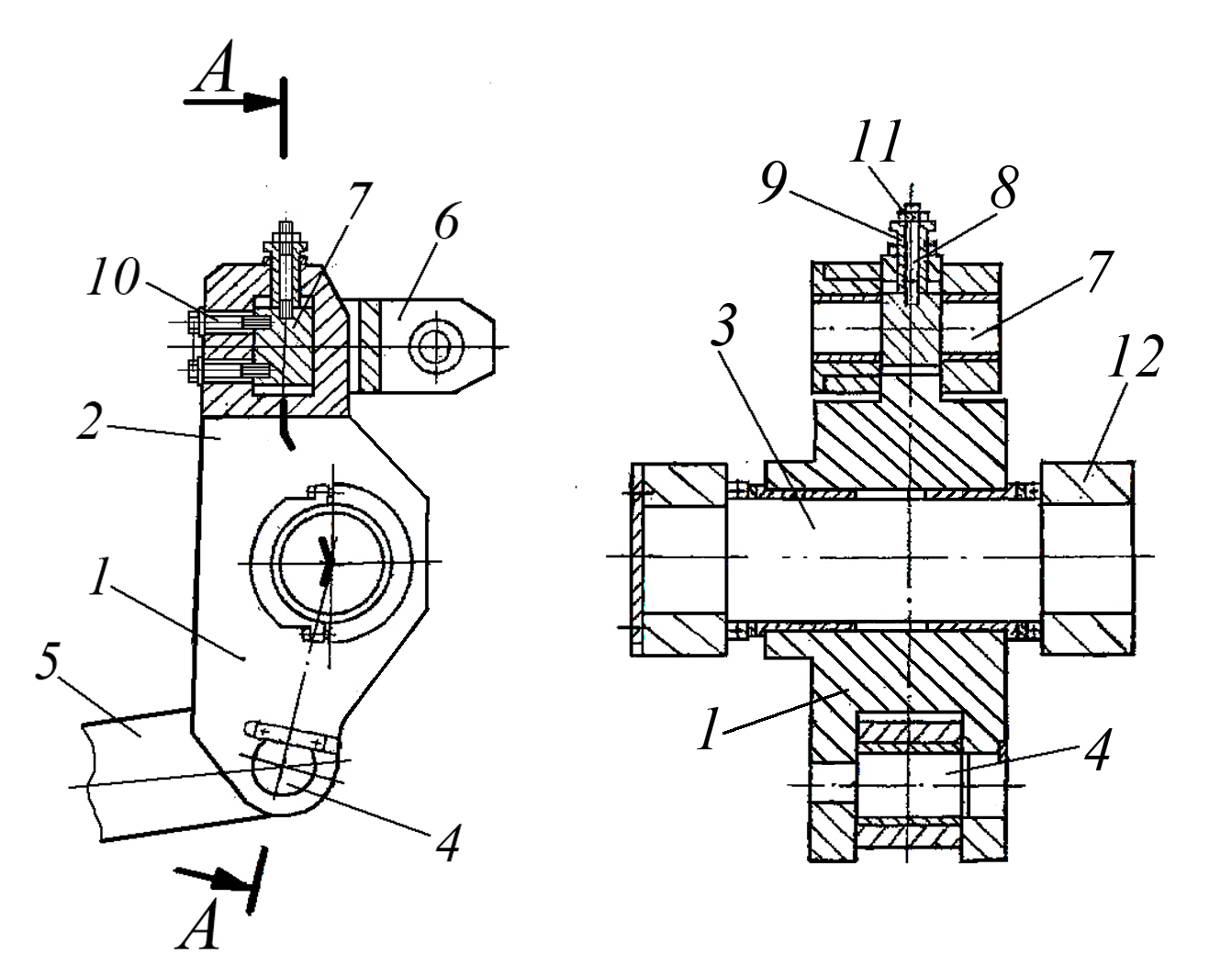
Na Fig. 15 mostra o desenho de um dispositivo embutido na alavanca de um mecanismo de alavanca fortemente carregado, que permite ajustar o comprimento de seu braço acionado. Esta alavanca, composta pelos braços motriz 1 e acionado 2 e conectada de forma articulada por meio de um eixo 4 à haste motriz e instalada no eixo 3, possui um eixo 7 embutido nela, localizado na janela de seu braço acionado, que conecta o braço 2 à haste acionada 6. Neste caso, a alavanca do eixo 3 é fixada rigidamente na moldura 12. O eixo 7 em sua parte central tem formato prismático e está localizado na ranhura do braço acionado 2 do alavanca, que lhe dá a capacidade de se mover, o que garante uma mudança em sua distância do eixo 3. Este desenho do eixo 7, cujo movimento na ranhura O braço acionado 2 da alavanca é realizado por meio de um pino 8 e bucha roscada 9, e fixação na posição desejada - por meio dos parafusos 10 e porca 11, permite alterar o comprimento do braço acionado 2 da alavanca, necessário ao ajustar o curso da saída ligação do mecanismo de alavanca no qual a alavanca está incluída.
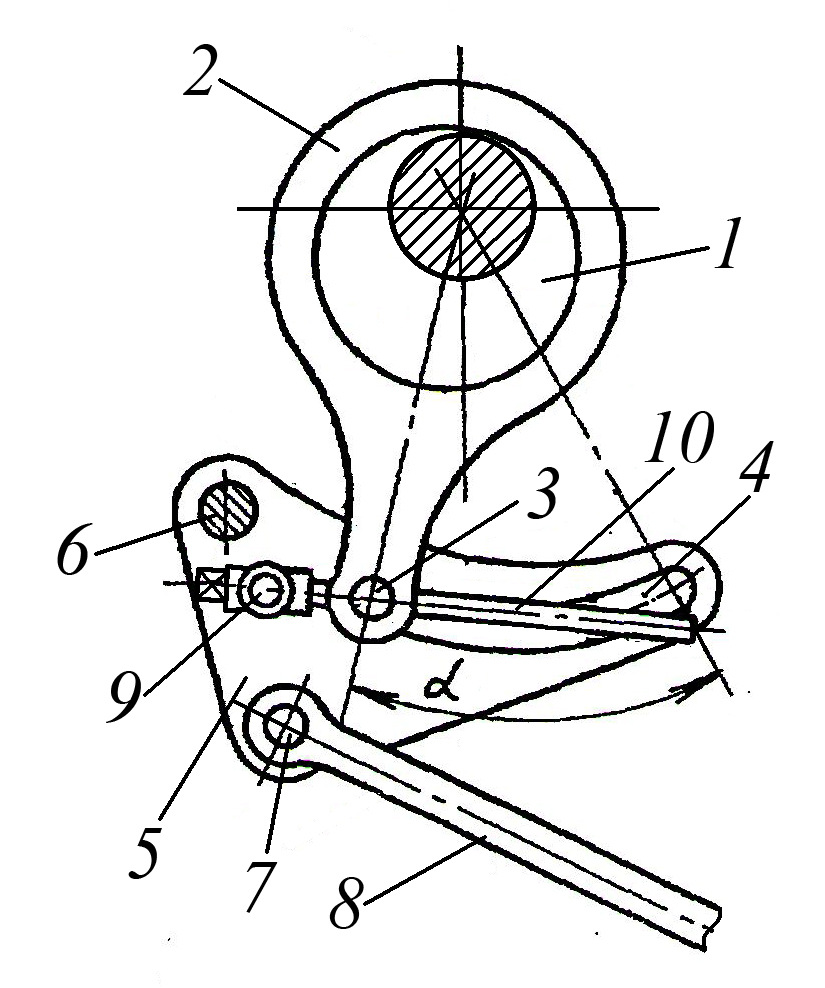 Fig. 16 Desenho do mecanismo de ajuste do comprimento do braço de alavanca, durante o qual sua posição angular não muda.
Fig. 16 Desenho do mecanismo de ajuste do comprimento do braço de alavanca, durante o qual sua posição angular não muda.
A desvantagem do projeto de dispositivos de ajuste do comprimento do braço da alavanca é que quando o ajuste é feito, a posição angular da alavanca em relação ao eixo de giro muda, o que em alguns casos é inaceitável. A Figura 16 mostra o desenho do mecanismo de ajuste do comprimento do braço de alavanca, durante o qual sua posição angular não muda. Este mecanismo contém um virabrequim 1, em cujo pescoço do virabrequim está instalada uma biela 2, que, por meio de um dedo - esteira 3, é conectada de forma articulada a uma alavanca intermediária de dois braços 5, que, por meio de um eixo 6 , é montado de forma articulada na estrutura (não mostrada na Fig. 16) e seu braço acionado através do eixo 7 é conectado à haste acionada 8. Ao mesmo tempo, um pino 9 é montado de forma articulada na alavanca 5, no orifício de no qual o parafuso de avanço 10 é instalado e fixado no sentido axial, e sua extremidade roscada interage com o furo roscado do pino 3, que está localizado com possibilidade de movimento na ranhura radial 4 da alavanca 5 e é fixado nele da mesma forma mostrada na Fig. 197. O comprimento do braço principal da alavanca de dois braços 5 é ajustado girando o parafuso de avanço 10, como resultado o pino 3 se move na ranhura do raio 4, enquanto o O formato do raio desta ranhura garante uma posição constante da alavanca 5 ao fazer ajustes.
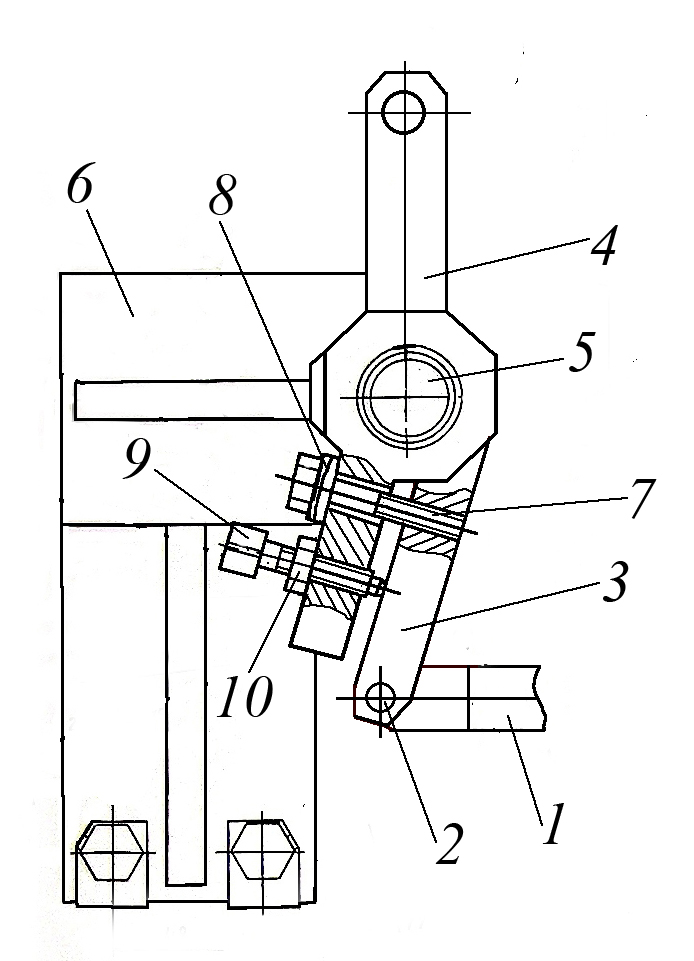 Fig. 17 Projeto do dispositivo para ajuste da posição angular da alavanca em relação ao seu eixo de giro.
Fig. 17 Projeto do dispositivo para ajuste da posição angular da alavanca em relação ao seu eixo de giro.
Em diversos mecanismos atuadores e auxiliares de equipamentos tecnológicos, torna-se necessário ajustar a posição inicial do elo de saída, o que pode ser conseguido ajustando a posição angular da alavanca, independentemente de ser o elo de saída ou intermediário do mecanismo. A Figura 17 mostra o desenho de um dispositivo para ajustar a posição angular da alavanca em relação ao seu eixo de giro. Ele contém uma haste motriz 1, que é conectada de forma articulada ao balancim motriz 3 por meio de um eixo 2, que, como a alavanca de dois braços acionada 4 é montada de forma articulada em um pino 5 fixado em um suporte 6. Ao mesmo tempo, o balancim 3 e a alavanca de dois braços 4 são rigidamente conectados entre si por meio de um parafuso 7 montado na alavanca 4 usando um conjunto de arruelas esféricas 8 e um parafuso limitador 9, cuja posição axial na alavanca 4 é fixada por uma porca 10. Tal conexão da alavanca 4 e do backstage 3 , com este último permanecendo inalterado , permite alterar a posição angular da alavanca
ha 4, que é realizado aparafusando e desaparafusando o parafuso 7 e o parafuso 9.
No entanto, este ajuste permite ajustar a posição da alavanca dentro de uma faixa estreita. Um maior ajuste da posição angular da alavanca pode ser conseguido ajustando o comprimento da haste de transmissão, o que é realizado por métodos conhecidos.
Braços de roqueiro
Os balancins, como já mencionado, são um dos tipos de alavancas, sendo também amplamente utilizados em mecanismos de alavanca. São utilizados nos casos em que, sem alterar a direção do movimento, é necessário alterar sua magnitude, ou obter uma lei de movimento mais complexa do elo de acionamento do mecanismo de alavanca. Na Fig. A Figura 18 mostra diversas opções de uso de balancins como parte de mecanismos de alavanca. Na Fig. 18a mostra um diagrama cinemático de um mecanismo de alavanca, cujo balancim conecta de forma articulada a biela motriz com a biela acionada, aumentando assim o curso do controle deslizante. Na Fig. 18b, c, d mostra o diagrama cinemático de um mecanismo de alavanca contendo um balancim intermediário e acionado, enquanto a presença de um balancim intermediário permite obter a lei de movimento necessária do balancim acionado. Na Fig. 18b, ambos os balancins estão conectados de forma articulada à biela acionada do mecanismo de alavanca, e na Fig. 18g, o balancim intermediário é conectado às bielas acionadora e acionada ao mesmo tempo, e o balancim acionado é conectado à biela acionada.
.
 Arroz. 18. Diagramas cinemáticos de mecanismos de alavanca contendo
Arroz. 18. Diagramas cinemáticos de mecanismos de alavanca contendo
Braços de roqueiro
Na Fig. 19 mostra o desenho de um macaco feito com base em um mecanismo de alavanca contendo um balancim como principal elemento de suporte. Ele contém uma sapata de suporte 1, que, através de um eixo 2, está conectada de forma articulada à viga de suporte 3, e esta última, através de um eixo 5, está conectada de forma articulada à biela 4, que está conectada de forma articulada à biela 9 através de um eixo 8. Além disso, a viga de suporte 3 é conectada de forma articulada à biela 3 através de um eixo 7 biela 6, e esta última, por sua vez, através do eixo 10 é conectada à biela 9, e através do eixo 11 com a sapata de suporte superior 12 do macaco. Neste caso, os eixos 7 e 8 são conectados pelo parafuso de avanço 14 ao cabo 15, que está em contato com o eixo 8 por meio de uma conexão roscada, e com o eixo 7 através de um furo liso e colar 13. o mecanismo de paralelogramo que, juntamente com a ligação dos eixos 7 e 8 por meio do parafuso de avanço 14, permite obter um ganho de esforço e garante o movimento paralelo da sapata 12 quando esta é levantada e abaixada.
O macaco funciona da seguinte maneira. A rotação da alça 15 junto com o parafuso de avanço 14 no sentido horário leva à convergência dos eixos 7 e 8 na direção horizontal, enquanto o balancim 3, girando no sentido anti-horário, move as bielas 9 e 10 de modo que a sapata de suporte superior 12 sobe junto com a carga levantada. Quando a alça 15 com o parafuso de avanço 14 gira na direção oposta, os eixos 7 e 8 divergem na direção horizontal, o balancim 3 gira no sentido horário e as bielas 9 e 10, movendo-se de acordo, movem a sapata de suporte 12 para baixo juntamente com a carga anteriormente levantada.
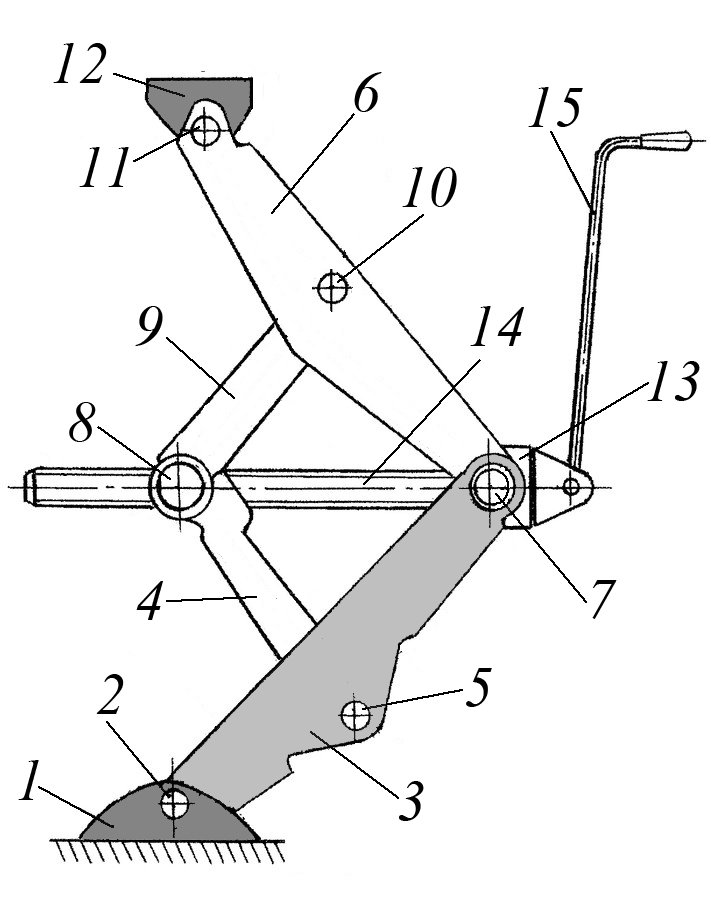 Arroz. 19. O desenho do macaco feito com base
Arroz. 19. O desenho do macaco feito com base
mecanismo de alavanca.
Ao instalar vários balancins em um eixo, que é montado em um suporte, eles podem ser montados rigidamente sobre ele, enquanto o próprio eixo pode ser colocado na estrutura por meio de rolamentos. Na Fig. A Figura 20 mostra o projeto da unidade de controle do freio do trator, que é feita a partir de diversos balancins localizados em um eixo comum montados por meio de suportes no chassi. O comando da alavanca do trator contém um eixo 2 montado por meio de mancais articulados 9 em suportes 1 montados sobre base fixa, em cuja superfície estriada estão fixadas rigidamente as corrediças acionadas 3 e 4, além de um setor de engrenagem 6 com lingueta 12, que está conectado a ele de forma articulada, bem como é instalado de forma articulada o mecanismo de acionamento 5. A fixação axial das peças instaladas no eixo 2 é realizada por meio de um anel de retenção 7 e da porca original 14. Articulações esféricas 9 são vedados internamente com manguitos 8, e externamente fechados com tampas 10, prensadas nos alojamentos 1. A articulação de acionamento 5 e o balancim acionado 4 são conectados às hastes de controle correspondentes por meio de rolamentos articulados 13.
A unidade de controle do freio funciona da seguinte maneira. Quando o elo de acionamento 5 é girado no sentido horário, a lingueta 12, movendo-se em arco, com sua extremidade pontiaguda captura um certo número de dentes no setor de engrenagem 6, enquanto o eixo 2, juntamente com os balancins acionados 3 e 4, como bem como o setor de engrenagens 6, permanecem estacionários. Quando o elo de acionamento 5 é girado no sentido anti-horário, a lingueta repousa com sua extremidade pontiaguda contra o dente correspondente do setor 6 e assim força-o, juntamente com o eixo 2 e os balancins acionados 3 e 4, a girar na mesma direção, como resultado, estes últimos movem as hastes de controle do freio (na Fig. 20 não mostrada).
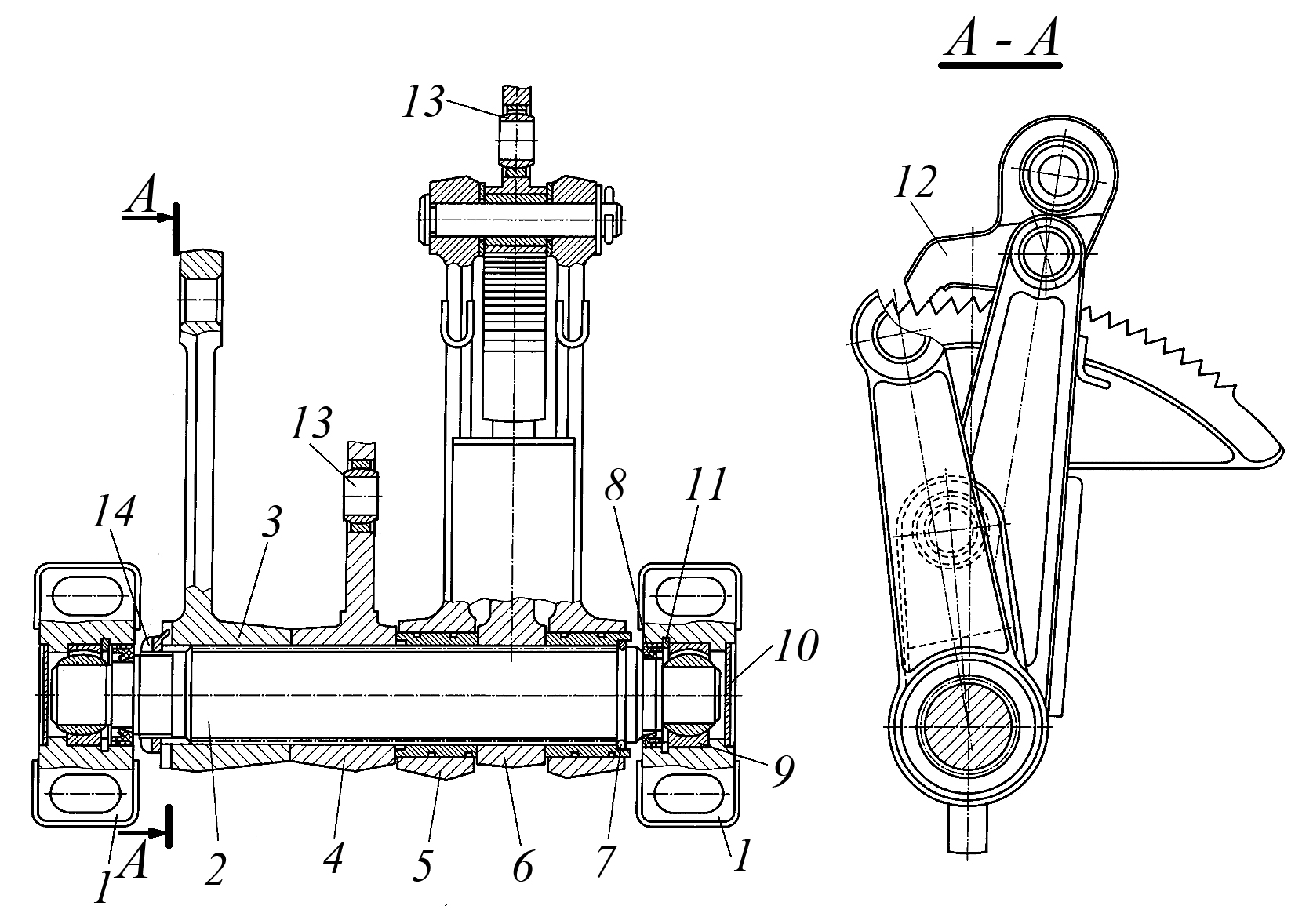 Arroz. 20. Projeto da unidade de controle do freio do trator, que é feita
Arroz. 20. Projeto da unidade de controle do freio do trator, que é feita
baseado em vários balancins localizados em um eixo comum.
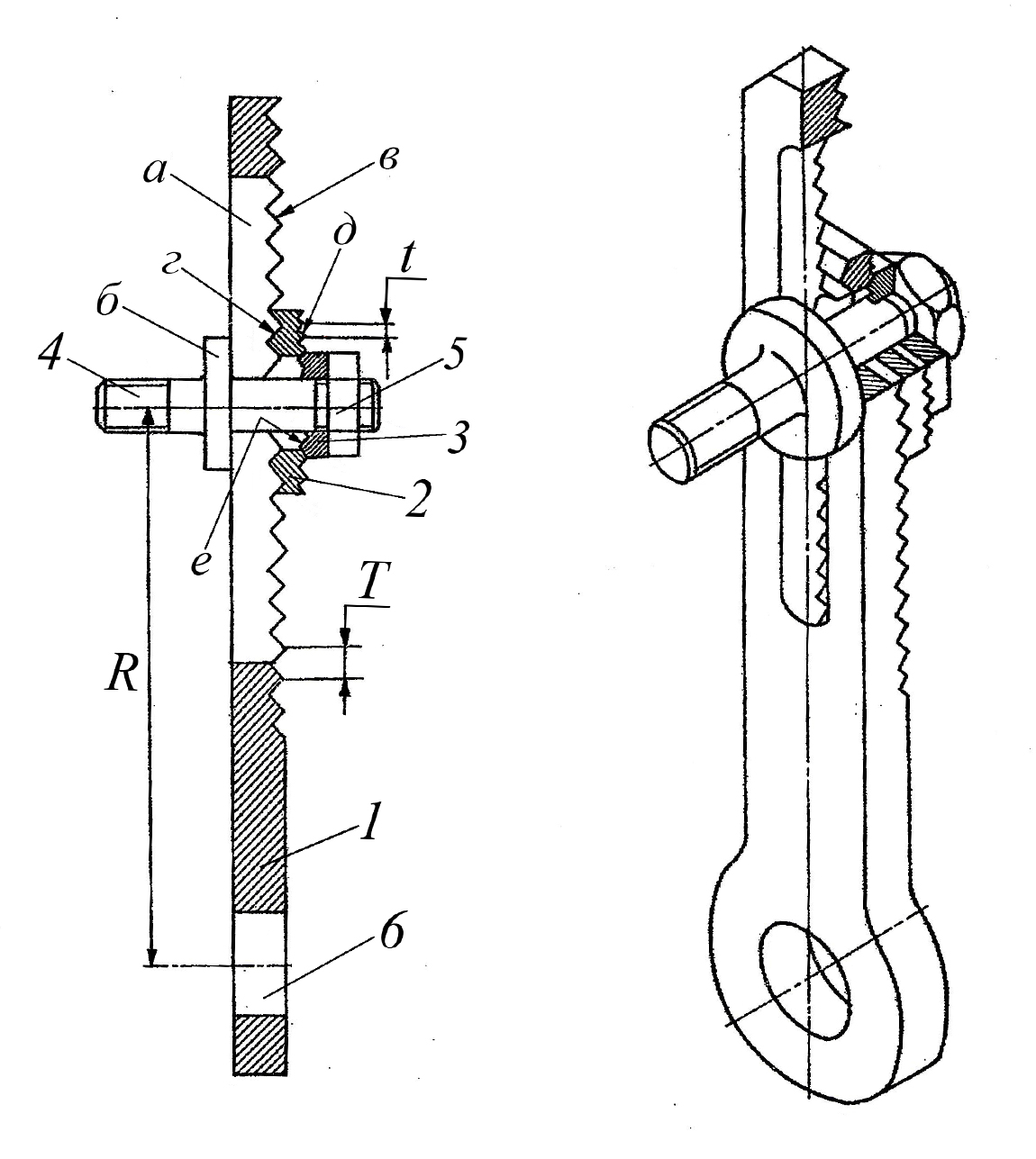
A composição dos balancins, bem como a composição das alavancas, pode incluir dispositivos que ampliam as capacidades dos mecanismos de alavanca que incluem essas alavancas. Na maioria das vezes, são dispositivos que alteram o balancim ou sua posição. Na Fig. A Figura 21 mostra o projeto de um balancim com uma distância ajustável do eixo da junta de dobradiça ao eixo de oscilação do balancim. Este balancim 1 é feito com estrias transversais V
em incrementos T
e sulco longitudinal A
, no qual o pino 4 com colar está instalado b
e duas extremidades roscadas, com a extremidade do pino inserida em uma ranhura longitudinal A
Estão instaladas uma arruela intermediária 2, uma arruela de suporte 3 e uma porca 5. Na arruela intermediária 2 há uma ranhura longitudinal, cujo comprimento eu
determinado pela seguinte fórmula: L = d + 2T/(Tt) t
Além disso, a arruela intermediária 2 no lado de seu contato com o balancim 1 possui estrias G
em incrementos T
correspondendo às estrias do balancim, e na superfície oposta da arruela intermediária 2 existem estrias d
em incrementos t
que entram em contato com as estrias correspondentes e
na arruela de suporte 3. Na parte inferior do balancim existe um orifício 6, no qual é instalado o eixo correspondente da conexão articulada do balancim com o suporte fixo. Ajuste aproximado de distância R
do eixo da junta de dobradiça ao eixo de oscilação do balancim é feito deslocando a arruela intermediária 2 na ranhura longitudinal A
balancins e ajuste fino - por deslocamento longitudinal da arruela de suporte 3 em relação à arruela intermediária 2 devido à presença de uma ranhura longitudinal na mesma. Neste caso, o valor do ajuste é determinado pela seguinte fórmula:
????R = n1T – n2 t;
Onde:
– n1
, o número de dentes pelos quais a arruela intermediária 2 é deslocada,
– n2
, o número de dentes pelos quais a arruela de suporte 3 é deslocada.
Para facilitar o ajuste da posição do dedo 4, uma escala com divisões correspondentes pode ser aplicada à tecla 1.
 Arroz. 21. Design de balancim de distância ajustável
Arroz. 21. Design de balancim de distância ajustável
do eixo da dobradiça ao eixo de oscilação do balancim.
Em alguns mecanismos de alavanca, a posição angular do balancim é ajustada girando o eixo de sua oscilação. Na Fig. A Figura 22 mostra o desenho do eixo de giro do balancim, que permite ajustar sua posição. Para regular a posição do balancim, seu eixo de giro 2, instalado fixamente nos furos da cremalheira 1, é feito com um pescoço excêntrico 3, no qual é instalada uma luva excêntrica 5 com uma superfície esférica externa em contato com o contrapeso superfície do balancim 6. Neste caso, uma arruela é instalada na extremidade roscada do eixo 2 e uma porca para sua fixação axial, e a cabeça do eixo localizada em sua extremidade oposta é feita em forma de poliedro, cada face da qual, em uma determinada posição angular do eixo 2, pode entrar em contato com a superfície de contato 7 feita em forma de saliência na cremalheira 1. Para ajustar a posição do balancim 6 eixo de giro o eixo 2 e a luva excêntrica 5 são girados, o que pode ser realizado na mesma direção ou em direções diferentes.
 Arroz. 22. O desenho do eixo de giro do balancim, permitindo
Arroz. 22. O desenho do eixo de giro do balancim, permitindo
regular a sua posição.
Na Fig. A Figura 23 mostra o desenho de um dispositivo embutido no balancim, que permite ajustar suavemente sua posição angular em relação ao eixo no qual está instalado. Este dispositivo, embutido no balancim 1, que é conectado de forma articulada por meio de um eixo 2 à haste de acionamento do mecanismo de alavanca, consiste em uma roda sem-fim 3 localizada no furo do balancim e com suas estrias internas 4 em contato com a superfície estriada do eixo 14, e também engata no sem-fim 5 instalado no furo do balancim, perpendicular ao eixo da roda sem-fim. Neste caso, o munhão direito do sem-fim 5 com extremidade hexagonal 6 na tampa 10, através de um conjunto de rolos 9, entra em contato com a luva 8, em cuja extremidade esquerda existem dentes cônicos 7, que entram em contato com os dentes correspondentes feitos no sem-fim 5, formando um engate. A extremidade esquerda do sem-fim 5, com seu furo cônico central, está em contato com a superfície de contato da arruela elástica 12, que é pressionada pela mola 11 e pela tampa 13.
O ajuste da posição angular do balancim 1 em relação ao eixo 14 é realizado da seguinte forma. Para girar o balancim 1 em uma direção ou outra, o sem-fim 5 é girado por uma cabeça hexagonal 6 com uma chave na direção desejada, enquanto sua rotação é transmitida à roda sem-fim 3, que, sendo fixada por meio de uma conexão estriada no eixo 14, permanece imóvel, e o balancim 1 gira na direção desejada, mudando sua posição angular em relação ao eixo 14.
Arroz. 23. Rocker com dispositivo embutido para ajuste
posição angular.
LITERATURA.
1. Ignatiev N. P. Fundamentos do design Azov 2011.
2. Ignatiev N. P. “Projeto de mecanismos” Azov 2015
O artigo utiliza informações das seções relevantes da obra do autor “ Noções básicas de design" publicado em 2011 e o trabalho do autor "Projeto de Mecanismo", publicado em 2015.
No manual de referência e metodológico "Projeto de Mecanismo" Além de exemplos de design de alavancas e balancins, contém:
– exemplos de projeto e recomendações para o uso de mecanismos de came, mecanismos intermitentes e mecanismos combinados,
– exemplos de projeto e recomendações para a utilização dos principais tipos de peças dos mecanismos acima: virabrequins, bielas, cursores, cames e suas juntas articuladas,
– recomendações para a escolha do tipo de acionamento do mecanismo e exemplos de sua implementação,
– cálculos de mecanismos,
– um exemplo de construção de um ciclograma da operação de uma máquina de came,
– metodologia para projetar mecanismos,
– recomendações para atribuir requisitos de precisão aos mecanismos e às suas peças típicas,
– exemplo de projeto de mecanismo
Para adquirir a versão completa do artigo, adicione-o ao carrinho,
O custo da versão completa do artigo é de 50 rublos.