Opis produktu
Mechanizmy dźwigniowe, część 6 Dźwignie i wahacze
W mechanizmach korbowych jako ogniwo wyjściowe lub pośrednie stosuje się dźwignie, wahacze lub za kulisami, które w przeciwieństwie do suwaka poruszającego się progresywnie wykonują ruch wahadłowy względem osi łączącej je z ramą. Jednak przy wykonywaniu tego samego rodzaju ruchu dźwignie, wahacze i kulisy mogą mieć zupełnie inną konstrukcję, która zależy przede wszystkim od celu i zakresu, a raczej dziedziny techniki, w której stosowana jest dźwignia lub mechanizm korbowy, do której zalicza się m.in. te linki.
Ramię dźwigni- jest to łącznik mechanizmu dźwigniowego, który osadzony obrotowo na stałej osi wykonuje względem niej ruch wahadłowy, otrzymując napęd najczęściej od korbowodu lub drążka, z którym jest również połączony obrotowo.
biegun- Jest to jednoramienna dźwignia zamontowana na stałej osi i napędzana korbowodem lub korbowodem.
Dźwignie
Dźwignie, nie rzadziej niż wały korbowe, korbowody i suwaki, są stosowane w mechanizmach dźwigniowych, ponieważ pozwalają nie tylko zapewnić, że mechanizm spełnia swoją funkcję funkcjonalną, będąc jego ogniwem wyjściowym, ale dodatkowo, będąc ogniwem pośrednim, pozwalają zmiana wielkości i kierunku przekazywanego ruchu, aw niektórych przypadkach przeniesienie go na płaszczyznę równoległą lub prostopadłą.
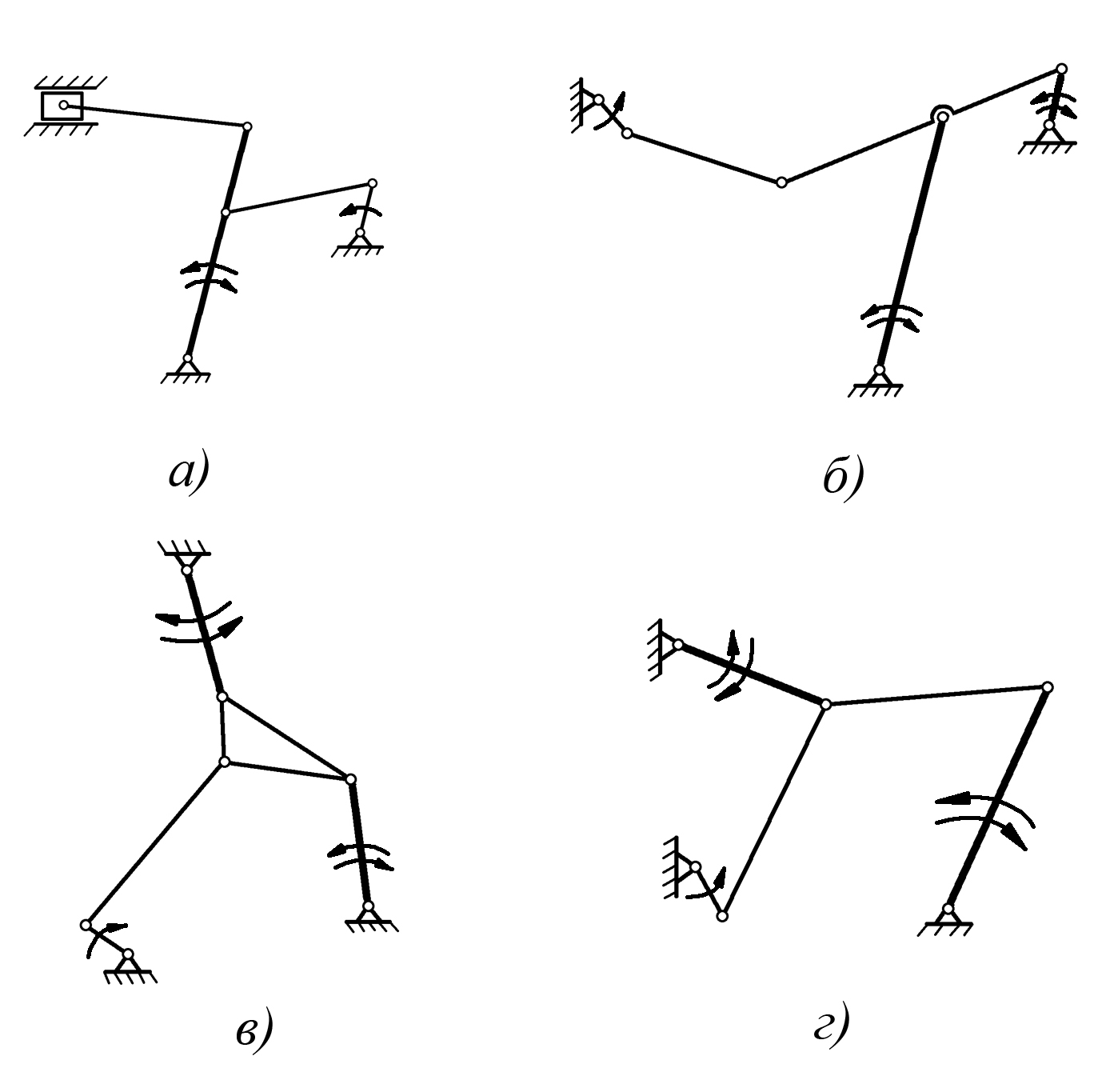
na ryc. 1 przedstawia konstrukcję różnych typów dźwigni, które są najczęściej stosowane w budowie maszyn. na ryc. 1 A pokazano konstrukcję dźwigni dwuramiennej, której otwory do połączenia z ogniwem prowadzącym i napędzanym znajdują się po jednej stronie osi jej wychylenia. na ryc. 1 B pokazano konstrukcję dźwigni dwuramiennej, której otwory do połączenia z ogniwem napędowym i napędzanym znajdują się po różnych stronach od osi jej wychylenia. na ryc. 1 V pokazano konstrukcję dźwigni dwuramiennej, której otwory do połączenia z ogniwem napędowym i napędzanym są ustawione pod kątem do siebie i znajdują się po różnych stronach od osi obrotu. na ryc. 1 G pokazano konstrukcję dźwigni trójramiennej, której otwory do połączenia z ogniwem napędowym i napędzanym są ustawione pod kątem do siebie i znajdują się po różnych stronach od osi obrotu. na ryc. 1 D pokazano konstrukcję dźwigni dwuramiennej, otwory do połączenia ogniwa prowadzącego i napędzanego są ustawione pod kątem względem siebie i znajdują się po tej samej stronie osi jego wychylenia, a ramiona prowadzące i napędzane są wykonane w postaci jednego elementu. na ryc. 1 mi przedstawiono konstrukcję dwuramiennej dźwigni silnie obciążonego mechanizmu dźwigniowego, w której napędzane ramiona, znajdujące się po przeciwnej stronie osi wychylenia dźwigni względem osi otworu w napędzanym ramieniu, przenoszą ruch do dwóch napędzanych prętów. na ryc. 1 I pokazana jest dźwignia dwuramienna, w której ramiona prowadzące i napędzane umieszczone pod kątem względem siebie są wykonane z otworami, których osie są usytuowane prostopadle do osi obrotu dźwigni. na ryc. 1 I przedstawia konstrukcję dwuramiennej dźwigni o konstrukcji prefabrykowanej, składającej się z ramienia napędowego i napędzanego, wykonanych w postaci oddzielnych części sztywno połączonych z wałem za pomocą połączeń zaciskowych dokręcanych śrubami, przy czym obecność wałka zapewniającego osiowe przemieszczenie ramion dźwigni umożliwia przenoszenie ruchu dźwigni w równoległych płaszczyznach. na ryc. 1 Do pokazano konstrukcję dźwigni dwuramiennej, która ma podobne przeznaczenie jak w poprzednim przykładzie (przemieszczenie przenoszonego ruchu w płaszczyźnie równoległej), ale jest wykonana w wersji odlewanej i posiada wydłużoną piastę centralną, w otworze której są łożyska toczne, na których dźwignia jest zamontowana na osi zamocowanej na ramie.
Ryż. 1. Projekt dźwigni najbardziej
powszechnie stosowane w inżynierii mechanicznej.
Dźwignie widoczne na zdj. 1 A–1zl wykonane metodą spawania, są zwykle stosowane w produkcji jednostkowej i małoseryjnej. W produkcji wielkoseryjnej i masowej dźwignie wykonuje się przez tłoczenie lub odlewanie. na ryc. 2 przedstawia budowę dźwigni odlewanych. na ryc. 2 A odlewana dźwignia używana w tarczy sterowniczej helikoptera, a na ryc. 2 B odlewana dźwignia stosowana w zawieszeniu samochodu.
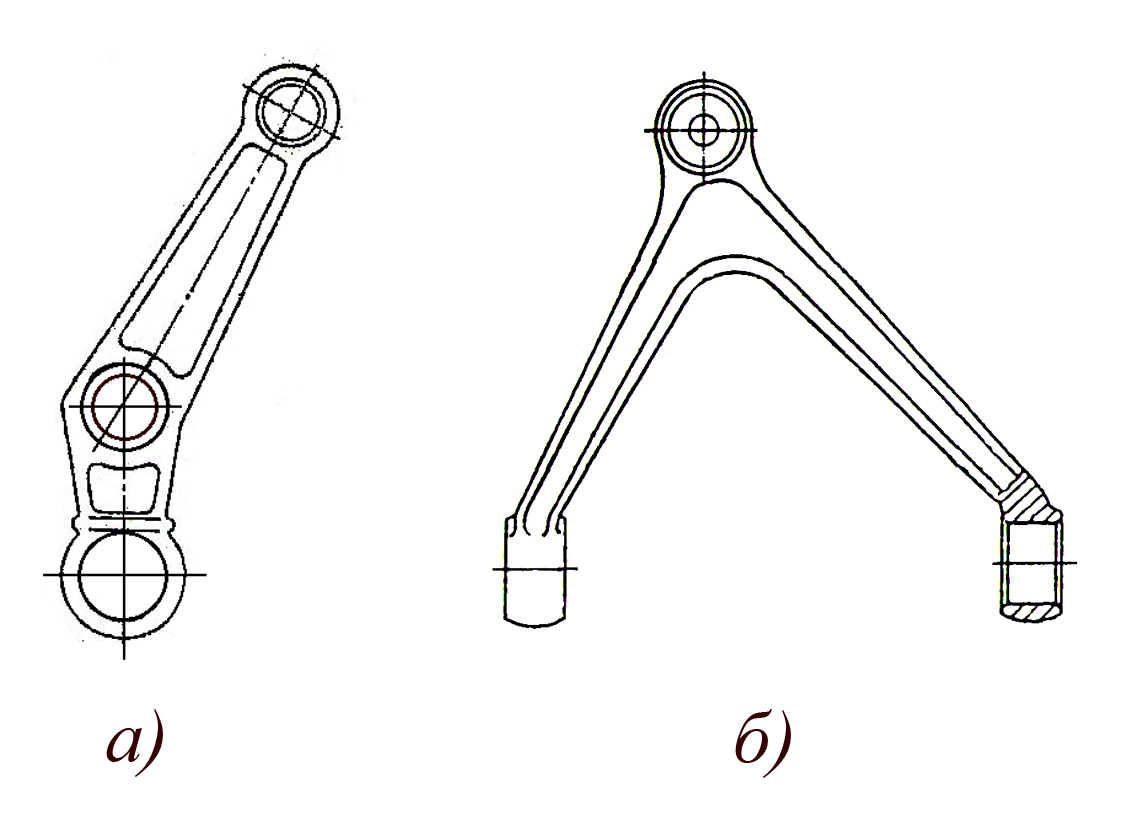 Ryż. 2. Odlewana konstrukcja dźwigni
Ryż. 2. Odlewana konstrukcja dźwigni
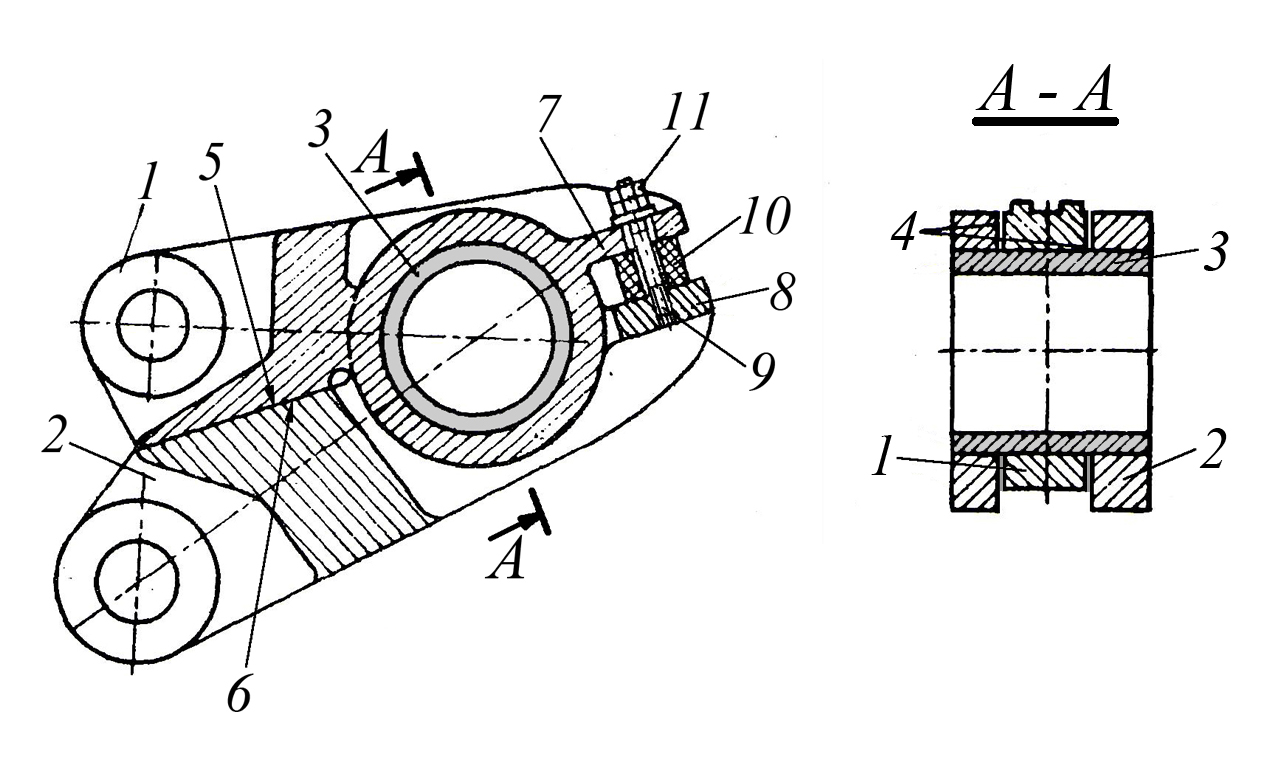
W niektórych przypadkach dźwignie są używane jako ogniwo pośrednie, które umożliwia przeniesienie ruchu z przesunięciem na płaszczyznę równoległą. na ryc. 3 A pokazano konstrukcję dźwigni, w której w tym celu ramiona prowadzące i napędzane są równoległe do siebie i przesunięte o pewną odległość. W tym przypadku dźwignia 1 na łożyskach ślizgowych 2 jest osadzona obrotowo na osi 3 zamocowanej na korpusie 4, natomiast osie 5 i 6 umieszczone w otworach ramion dźwigni napędowej i napędzanej łączą ją z odpowiednimi ogniwami mechanizm dźwigni, który zawiera dźwignię. W celu dokładnego umiejscowienia dźwigni 1 na osi 3 zamontowane są pierścienie regulacyjne 7, a blokowanie dźwigni na osi odbywa się za pomocą pierścienia ustalającego 8.
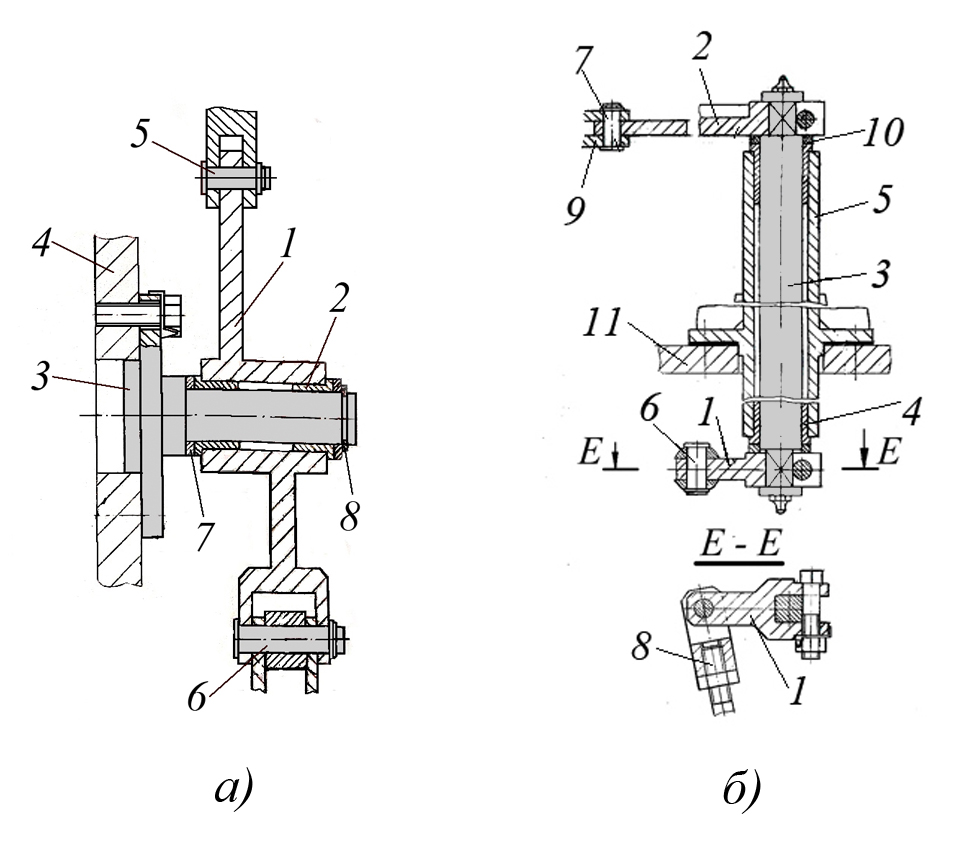 Ryż. 3. Konstrukcja dźwigni, których ramiona są równoległe do siebie
Ryż. 3. Konstrukcja dźwigni, których ramiona są równoległe do siebie
przyjaciela i są przesunięte o pewną odległość.
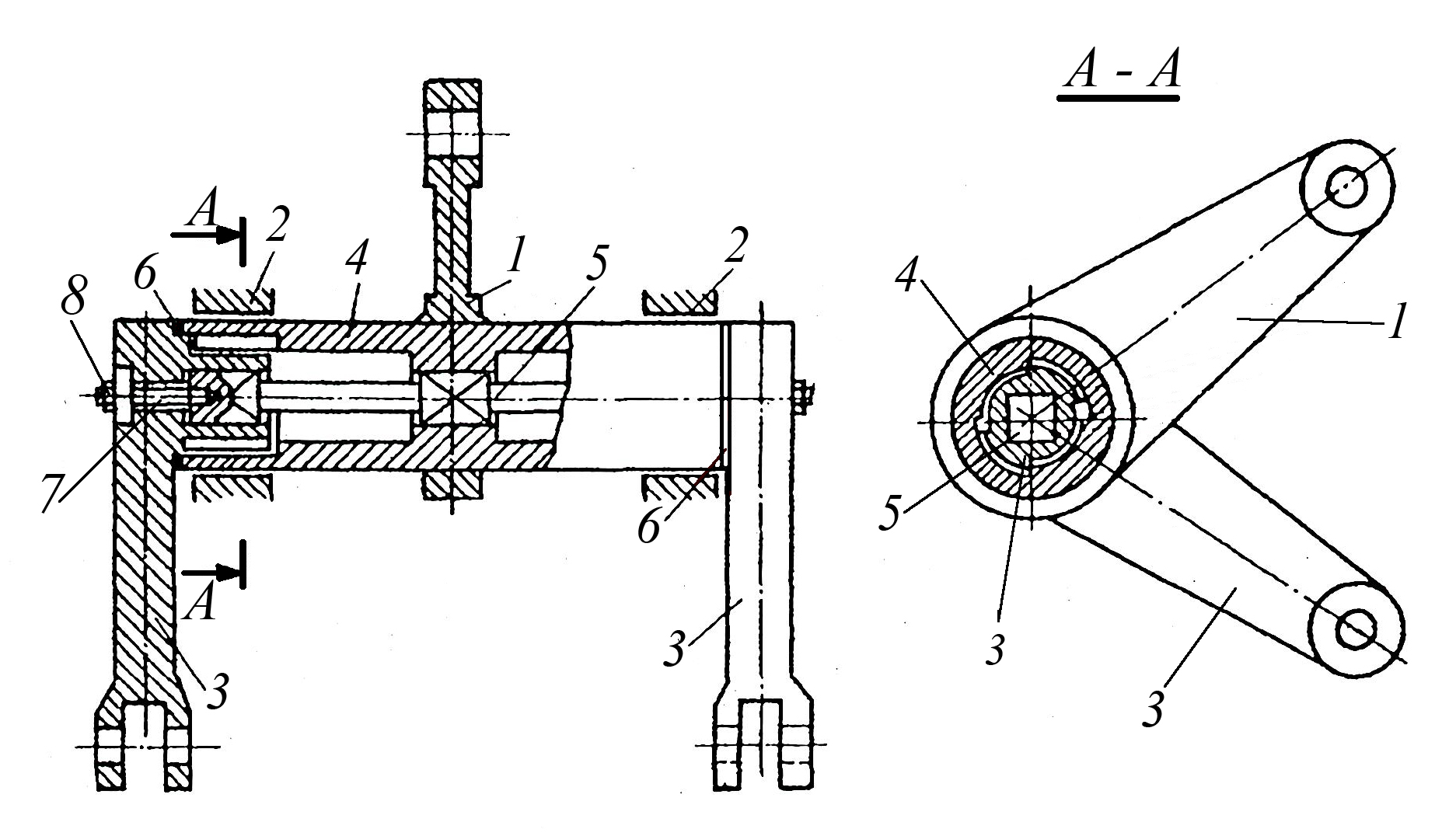
na ryc. 3 B pokazano konstrukcję prefabrykowanej dźwigni, składającej się z ramienia prowadzącego 1 i napędzanego 2, które są sztywno zamocowane na wale 3 za pomocą połączeń końcowych. Rolka 3 na łożyskach 4 jest osadzona w otworze wspornika 5, zamocowana na ramie 11 urządzenia technologicznego, ramię prowadzące 1 dźwigni przez oś 6 jest połączone obrotowo z prętem napędowym 8, a napędzany ramię 2 dźwigni poprzez oś 7 jest połączone obrotowo z napędzanym łącznikiem 9 mechanizmu dźwigniowego. Położenie rolki 3 względem wspornika 5 zapewniają pierścienie regulacyjne 10.
 Ryż. 4. Projektowanie dźwigni prefabrykowanych.
Ryż. 4. Projektowanie dźwigni prefabrykowanych.
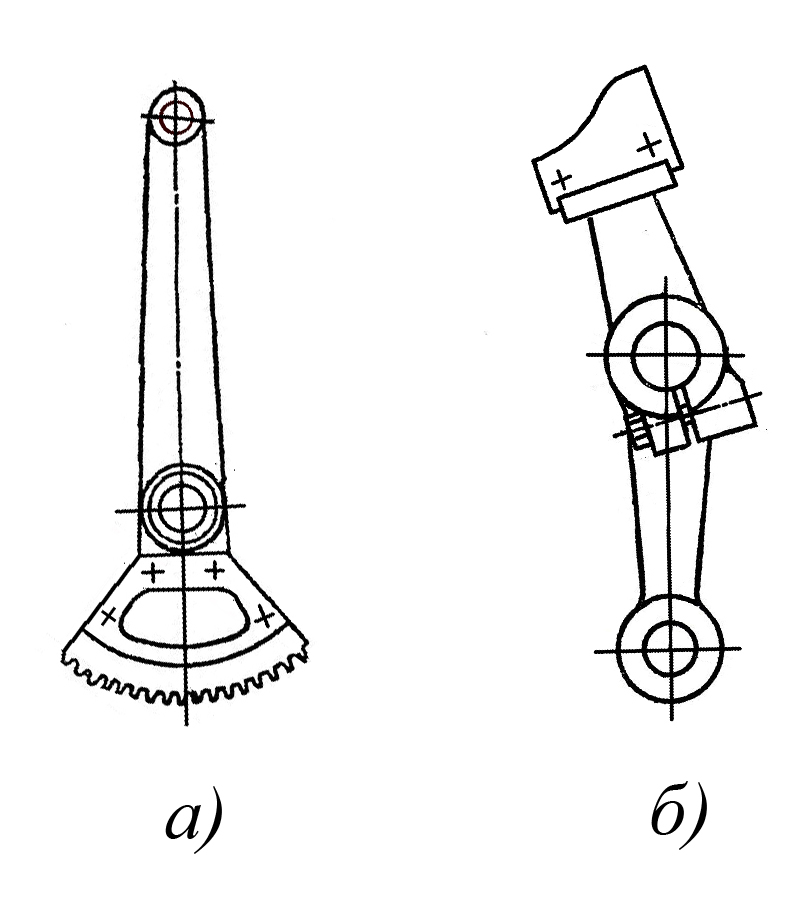
W urządzeniach automatycznych mechanizmy łączące są często używane w połączeniu z przekładniami i mechanizmami krzywkowymi, podczas gdy mogą one zawierać prefabrykowane dźwignie. na ryc. 4 pokazuje opcje konstrukcyjne takich dźwigni. na ryc. 4 A pokazano projekt prefabrykowanej dźwigni składającej się z samej dźwigni i zamocowanego na niej sektora zębatego. na ryc. 4 B pokazano projekt prefabrykowanej dźwigni składającej się z dźwigni i zamocowanej na niej płaskiej krzywki. W obu przypadkach, w celu niezawodnego i dokładnego zamocowania zarówno zębatki, jak i krzywki, w dźwigni znajdują się odpowiednie powierzchnie centrujące i ustalające.
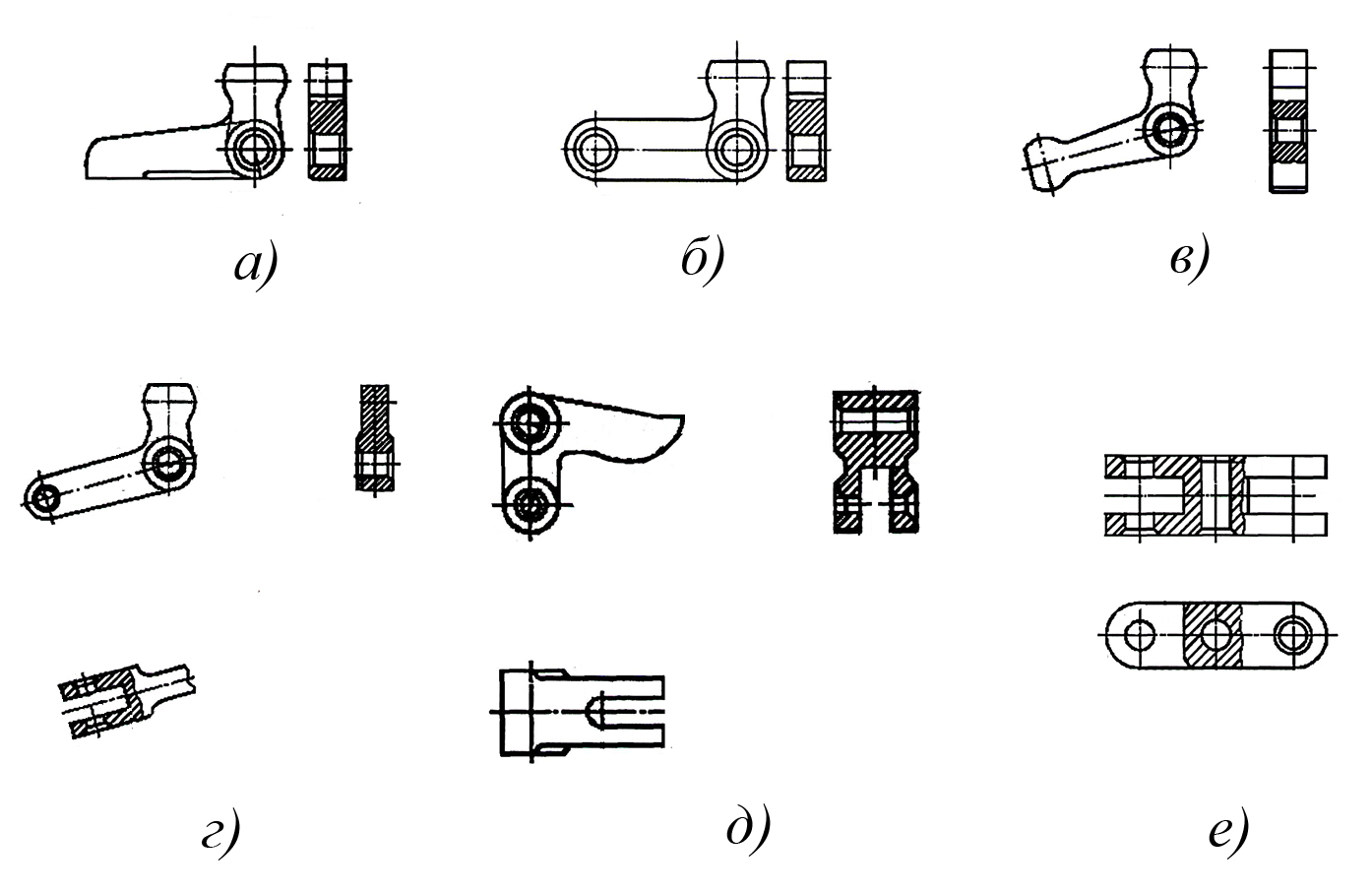 Ryż. 5. Konstrukcja dźwigni stosowanych w uchwytach obróbczych.
Ryż. 5. Konstrukcja dźwigni stosowanych w uchwytach obróbczych.
Dźwignie o różnych konstrukcjach są szeroko stosowane w uchwytach do obróbki skrawaniem. na ryc. 5 pokazuje opcje dla znormalizowanych projektów dźwigni stosowanych w uchwytach do obróbki:
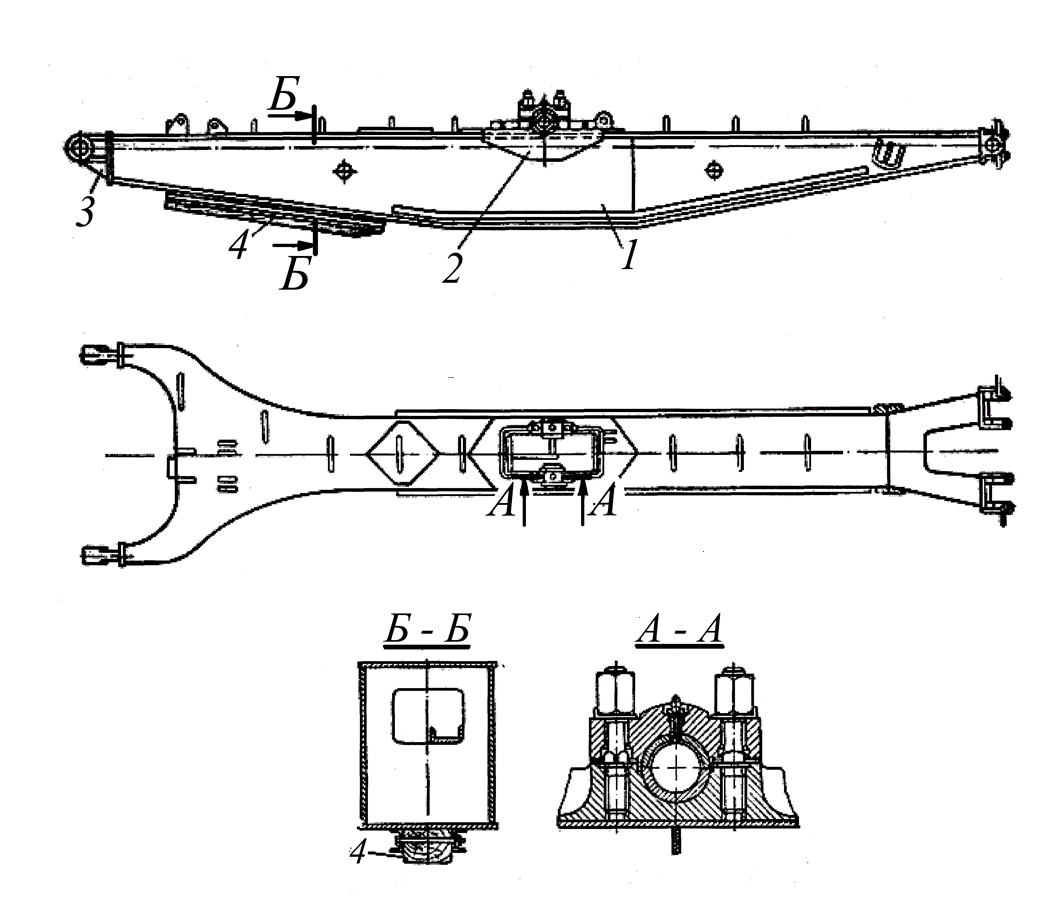
Mechanizmy dźwigniowe są szeroko stosowane w sprzęcie budowlanym i drogowym (dźwigi, koparki, spychacze), w tym przypadku dźwignie wchodzące w ich skład mają gabaryty od kilku do kilkudziesięciu metrów i dlatego są wytwarzane przez spawanie. na ryc. 6 przedstawia konstrukcję spawanego wysięgnika koparki, który składa się z belki 1, wspornika 2 do montażu wału łożyska siodła, amortyzatora 3 i pięty 4.
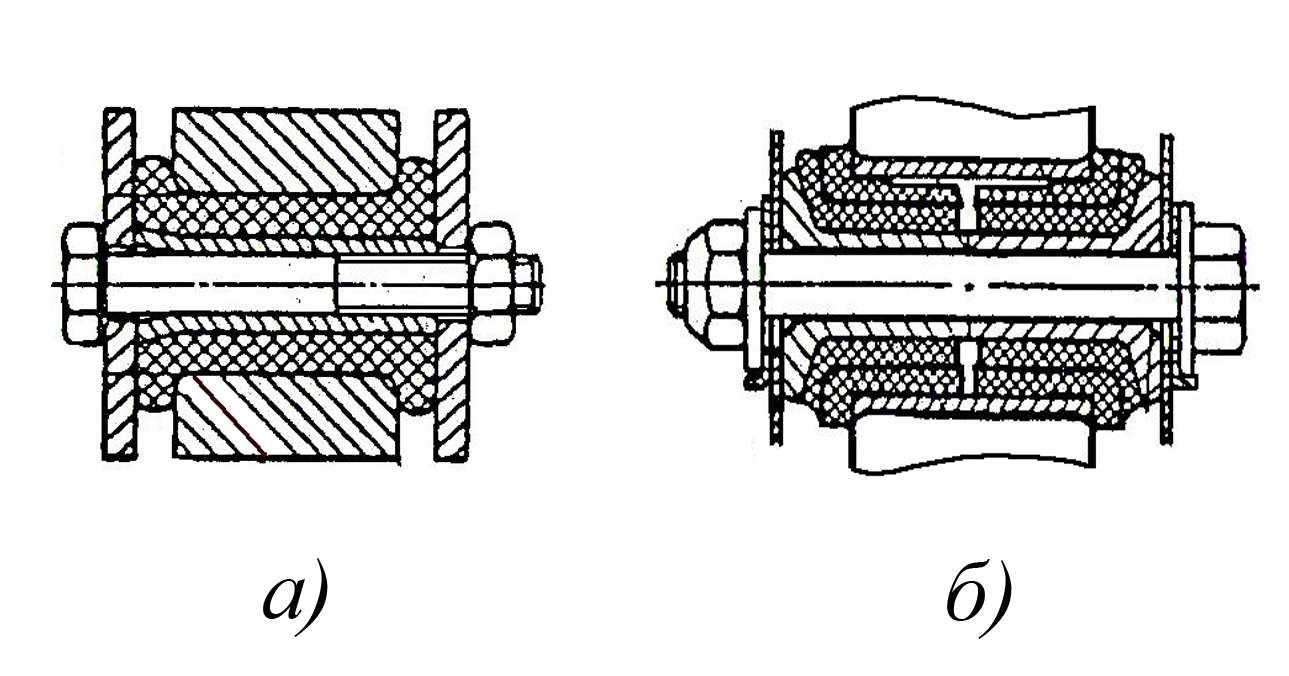 Ryż. 7. Konstrukcje gumowo-metalowe
Ryż. 7. Konstrukcje gumowo-metalowe
przeguby obrotowe.
Przeguby obrotowe dźwigni z korbowodami i korbowodami wykorzystują łożyska ślizgowe i toczne, łożyska igiełkowe, oryginalne i standardowe przeguby kulowe, których konstrukcje omówiono w artykule „Przeguby obrotowe”. W wielu przypadkach przeguby dźwigni z korbowodem lub korbowodem podlegają nie tylko siłom poprzecznym, ale również pracują skrętnie, co ma miejsce np. w przegubach obrotowych dźwigni z drążkiem w zawieszeniu samochodu. W takich przypadkach stosuje się połączenia gumowo-metalowe (patrz rys. 7).
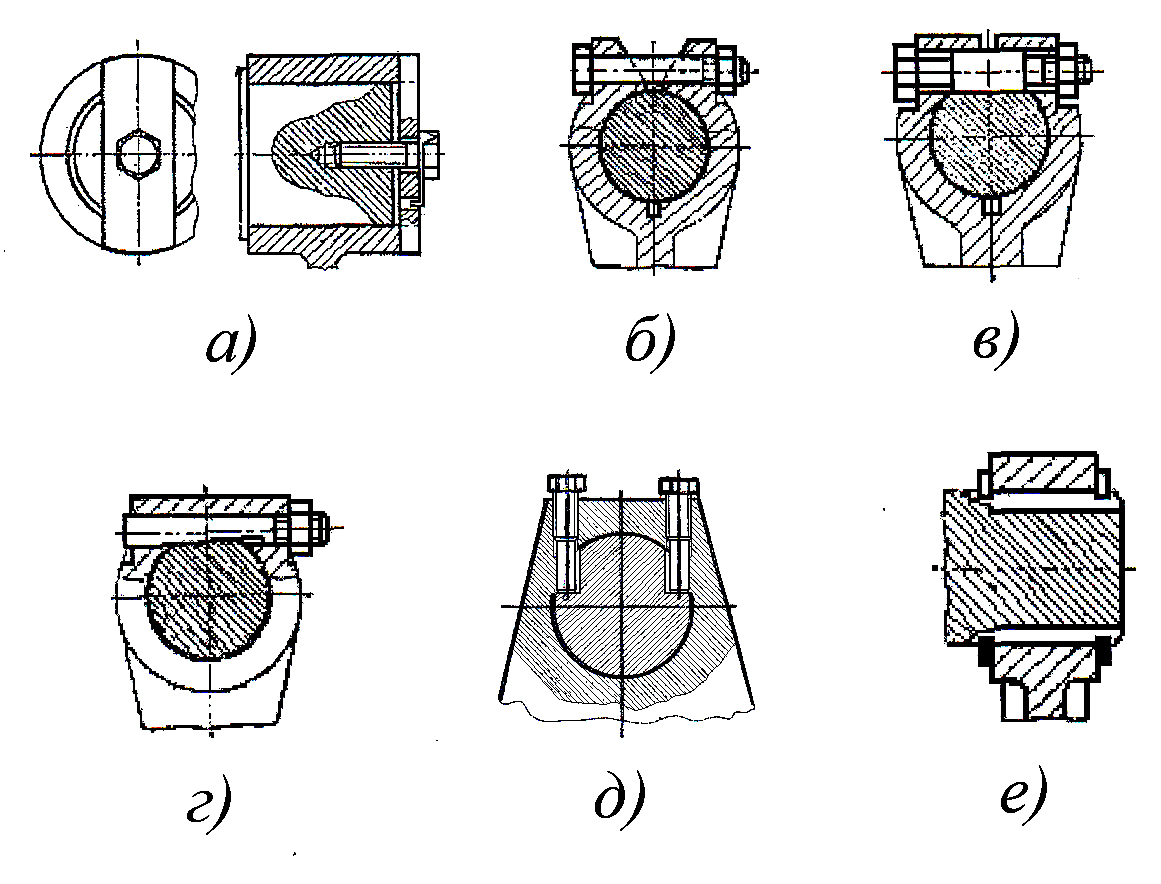 Ryż. 8. Opcje mocowania dźwigni na wale.
Ryż. 8. Opcje mocowania dźwigni na wale.
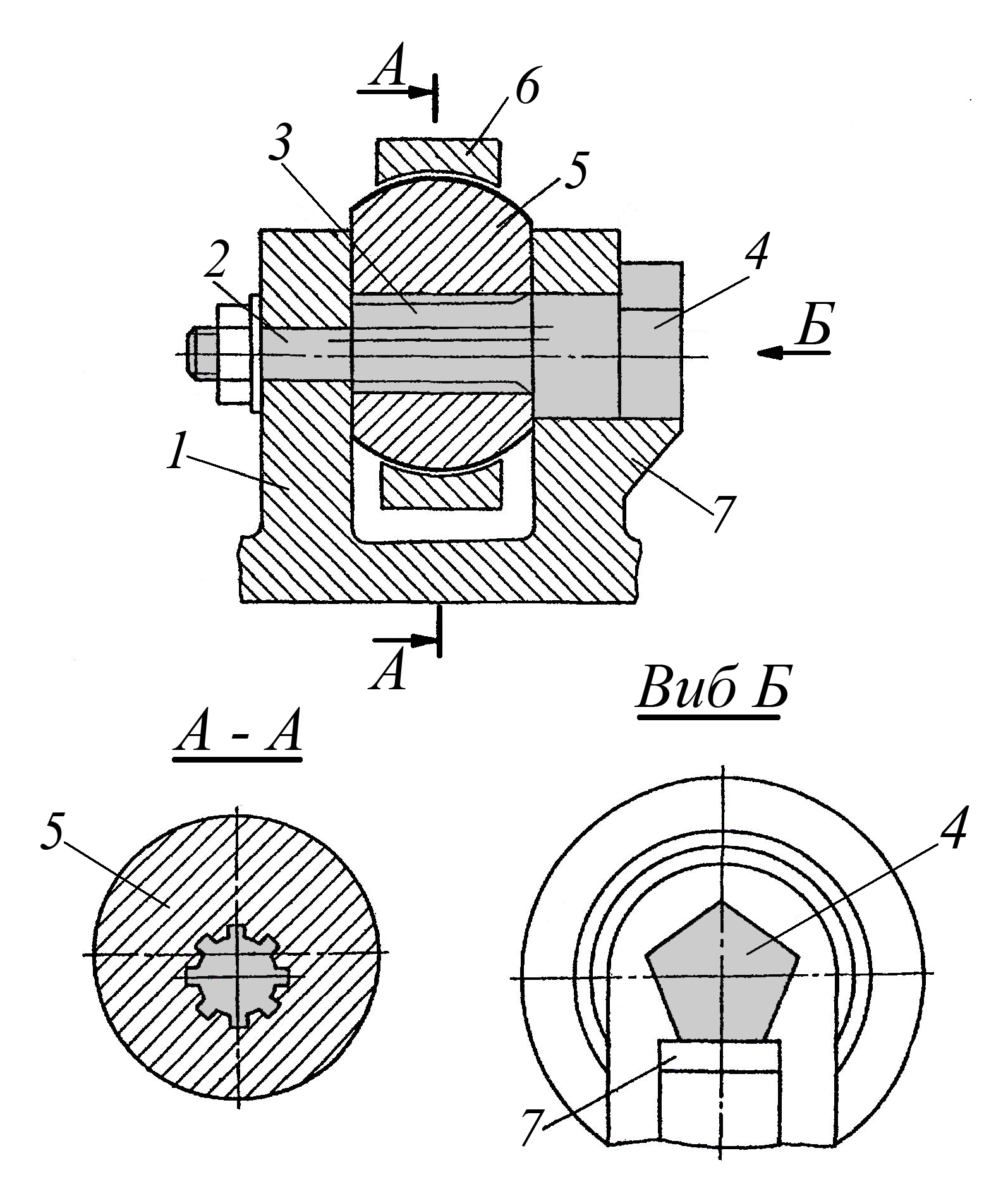
Ważnym elementem, który w dużej mierze decyduje nie tylko o zasobach mechanizmu dźwigniowego, ale często o jego wydajności, jest połączenie dźwigni z wałem. , przenosząc na nią moment obrotowy. Połączenie to powinno zapewniać eliminację szczelin, przedwczesnego zużycia lub zgniatania stykających się powierzchni podczas eksploatacji oraz prostotę i wygodę jego demontażu i montażu. Przykłady takich połączeń pokazano na rys. 8. Na ryc. 8 A przedstawia mocowanie dźwigni na wale, w którym moment obrotowy przenoszony jest przez wpust końcowy połączony z podkładką. To mocowanie jest stosowane w mechanizmach dźwigniowych pracujących przy niskich prędkościach i zmiennym obciążeniu. W tym przypadku klucz końcowy jest zwykle wykonany ze stali 45 i poddany hartowaniu do twardości 35-40 jednostek HRC, jest montowany na wale i dźwigni dla pasowania H11 / d11. Połączenie jest łatwe w wykonaniu i niezawodne w działaniu. na ryc. 8 B pokazano końcowe połączenie wału z dźwignią, w którym przenoszenie momentu obrotowego odbywa się w wyniku sił tarcia między zewnętrzną powierzchnią wału a otworem dźwigni, powstającym podczas dokręcania go śrubą sprzęgającą. W celu lepszego zaciśnięcia trzonka w dźwigni wyfrezowany jest centralny rowek. Połączenie, podobnie jak poprzednie, jest stosowane w mechanizmach pracujących z małymi prędkościami i zmiennym obciążeniem. na ryc. 8 V pokazano połączenie, w którym obejma wału jest połączona z jej mocowaniem za pomocą śruby, której część środkowa jest wykonana bardziej precyzyjnie niż w zwykłym przypadku i jest mocno dociśnięta do powierzchni współpracującej otwartego rowka cylindrycznego wykonanego na wał. Śruba taka wykonana jest ze stali 45 i zahartowana do twardości 35 - 40 jednostek HRC, a jej środkowa część osadzona jest na wale zgodnie z H11/d11. Połączenie może służyć do przenoszenia znacznych momentów obrotowych. Połączenie pokazane na rys. 8 D. W nim przenoszenie momentu obrotowego odbywa się za pomocą sił tarcia między wałem a dźwignią, które powstają w wyniku dokręcenia dwóch śrub regulacyjnych i oparcia tych śrub o płaskowniki wału. W tej konstrukcji połączenia trzpień śruby stykający się z wałem jest również utwardzany do twardości HRC 35–40 jednostek. na ryc. 8 G pokazano połączenie, w którym przenoszenie momentu obrotowego z wałka na dźwignię odbywa się za pomocą osi klina, która unieruchamia dźwignię w wyniku kontaktu z wykonanym na wale wzajemnym spłaszczeniem. To połączenie jest stosowane w mechanizmach dźwigniowych pracujących przy dużych prędkościach i obciążeniach. W mechanizmach dźwigniowych pracujących w warunkach zmiennych obciążeń dynamicznych przy znacznych prędkościach ich połączenie z wałem odbywa się za pomocą ewolwentowego połączenia wielowypustowego wyśrodkowanego na powierzchni bocznej, co pokazano na ryc. 8 mi. Wewnętrzne wypusty w dźwigni wykonuje się przez wyciągnięcie, dlatego w przypadku jednostkowej lub małoseryjnej produkcji takich połączeń dźwigni z wałem, stosowanie wielowypustów ewolwentowych może nie być ekonomicznie uzasadnione.
Aby spełnić specyficzne wymagania dla mechanizmów dźwigniowych, do których zalicza się dźwignie i zależą one głównie od dziedziny techniki, w której są stosowane i niezależnie od tego, czy są ogniwem wyjściowym, czy pośrednim, można w nie wbudować różne urządzenia dodatkowe umożliwiające:
- chronią mechanizm przed przeciążeniem,
- wyregulować długość ramion dźwigni,
- wyregulować kąt dźwigni.
Rozważ kilka przykładów takich urządzeń wbudowanych w dźwignie.
 Ryż. 9. Projekt zabezpieczenia
Ryż. 9. Projekt zabezpieczenia
urządzenie wbudowane w dźwignię
załadowany mechanizm.
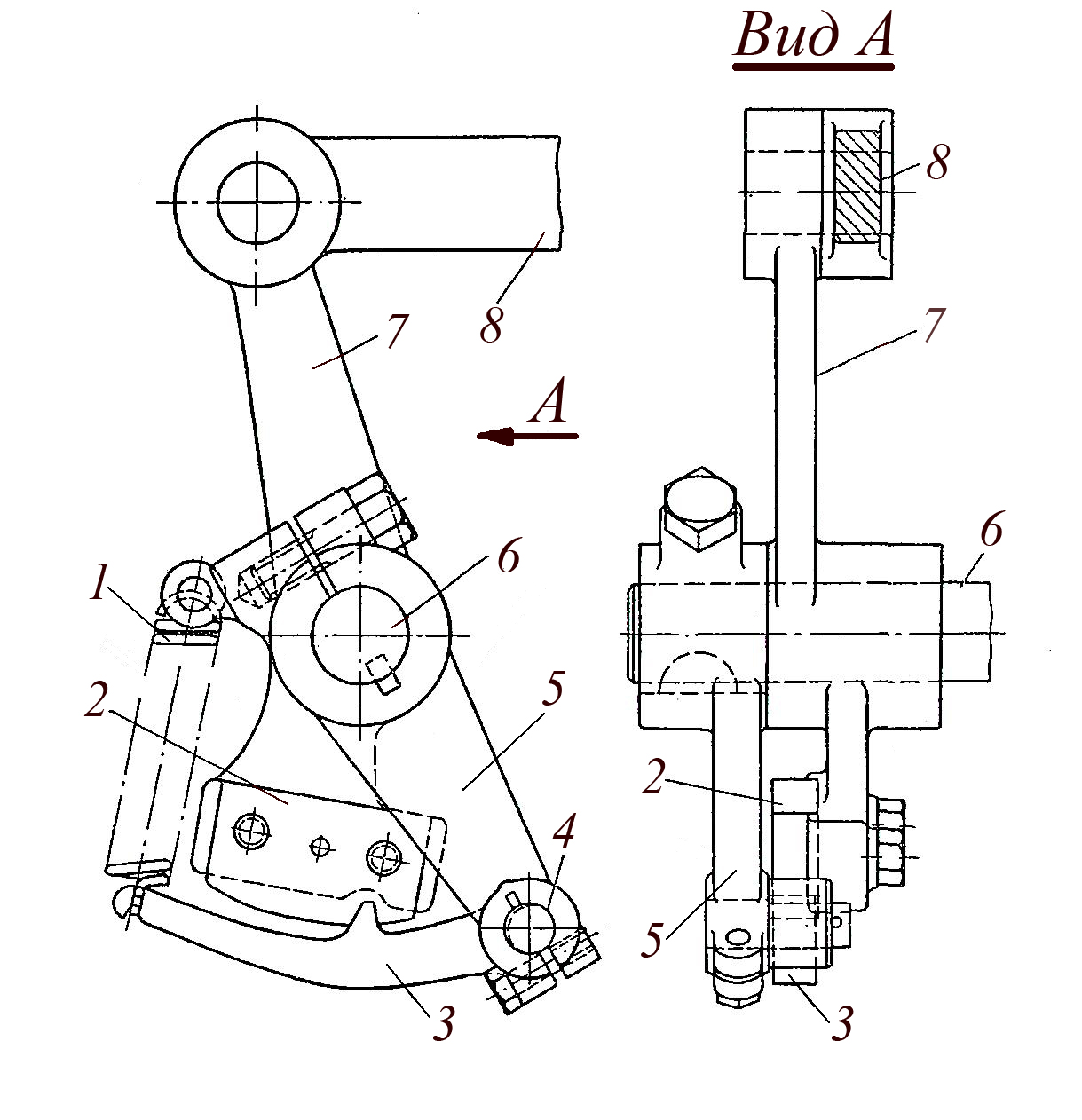
na ryc. 9 przedstawia konstrukcję zabezpieczenia wbudowanego w dźwignię lekko obciążonego mechanizmu, które zapewnia przerwanie przenoszenia ruchu przez dźwignię, gdy na jej część napędzaną zostanie przyłożona większa niż dopuszczalna siła. Zawiera wał 6, na którym osadzona jest obrotowo dźwignia 7, również połączona obrotowo z korbowodem 8, dźwignia 5 jest sztywno połączona z wałem 6 za pomocą połączeń wpustowych i zaciskowych, natomiast dźwignia 5 jest połączona obrotowo z zatrzask 3, stale dociskany przez sprężynę napinającą 1, do płytki 2, zamocowanej na dźwigni 7. Kontakt zatrzasku 3 z płytką 2 odbywa się za pomocą zęba wchodzącego do odpowiedniej wnęki. Jeśli na korbowód 8 działa zwiększona siła, sprężyna 1 rozciąga się i ząb zatrzasku 3 wychodzi z wnęki płytki 2, a ruch z dźwigni 5 na dźwignię 7 nie jest przenoszony, podczas gdy dźwignia 5 będąc zamocowany na wale, nadal się kołysze. Po ustaniu działania zwiększonej siły ząb zatrzasku 3 ponownie swobodnie wchodzi w rowek płytki 2, a dźwignia 7 zaczyna się poruszać wraz z dźwignią 5 jako całością, przenosząc ruch na korbowód 8.
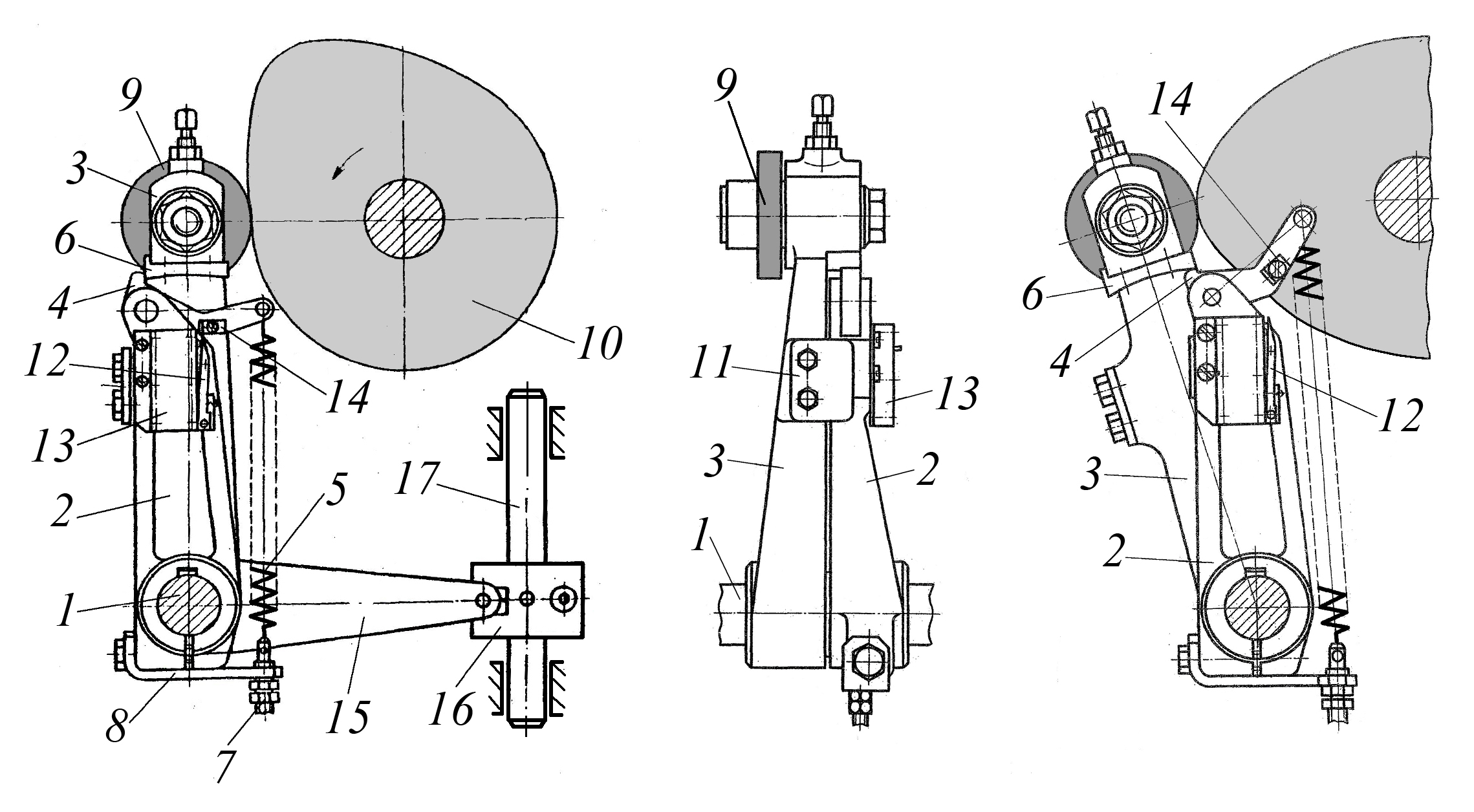 Ryż. 10. Bezpieczeństwo wbudowane w dźwignię krzywkową.
Ryż. 10. Bezpieczeństwo wbudowane w dźwignię krzywkową.
na ryc. 10 przedstawia konstrukcję zabezpieczenia wbudowanego w prefabrykowaną dwuramienną dźwignię, która jest popychaczem mechanizmu krzywkowego. Zawiera prefabrykowaną dźwignię dwuramienną zamocowaną na wale 1, składającą się z wahacza 3 z rolką 9 stykającą się z krzywką 10 oraz dźwigni dwuramiennej 2, której ramię prowadzące ma występ 4 dociskany przez sprężyna 5 do oporu 6 wahacza 3, a napędzane ramię 15 dźwigni 2 jest połączone obrotowo z obudową 16 zamocowaną na pręcie napędzanym 17. Na dźwigni 2 mikroprzełącznik 13 styka się z dźwignią przełączającą 12 , a także ogranicznik 14, który może współdziałać z dźwignią przełączającą 12. Rolka 9 wahacza 3 jest stale dociskana do krzywki 10 za pomocą sprężyny (nie pokazanej na ryc. 193) , a interakcja wahacz 3 za pomocą dźwigni dwuramiennej 2, przy obróceniu wahacza zgodnie z ruchem wskazówek zegara, odbywa się za pomocą drążka 11.
Urządzenie działa w następujący sposób. Podczas normalnej pracy mechanizmu (przy braku przeciążeń) krzywka 10 poprzez rolkę 9 przekazuje ruch wahadłowy na wahacz 3, który stykając się swoim ogranicznikiem 6 z występem 4 dwuramiennej dźwigni 2 informuje ten ostatni ruch kołyszący, a jego napędzane ramię 15 oddziałujące z korpusem 16 zamocowanym na pręcie 17 informuje ją o ruchu translacyjnym (pręt wykonuje skok roboczy). Kiedy wahacz 2 obraca się zgodnie z ruchem wskazówek zegara, ruch dźwigni 3 jest przenoszony za pomocą drążka 11, a napędzane ramię 15 dźwigni 2 nakazuje drążkowi 17 ruch w przeciwnym kierunku (drążek pracuje na biegu jałowym), oddziałując z nim przez korpus 16. Przy takim wzajemnym ustawieniu wahacza 3 i ramienia prowadzącego dźwigni 2, ogranicznik 14 działa na dźwignię przełączającą 12, która z kolei zamyka mikroprzełącznik 13. Po przyłożeniu obciążenia do pręta 17 wzrasta powyżej dopuszczalnego, gdy wykonuje skok roboczy, ten ostatni zatrzymuje się wraz z korpusem 16 i dźwignią dwuramienną 2, a krzywka 10, kontynuując obrót w tym samym kierunku, działa na rolkę 9, a wahacz ramię 3, pokonując siłę sprężyny 5, obraca się w kierunku przeciwnym do ruchu wskazówek zegara. W wyniku tego ogranicznik 14 zwalnia dźwignię przełączającą 12, a ta wyłącza mikroprzełącznik 13, co jednocześnie zatrzymuje napęd maszyny przez układ automatyki elektrycznej.
 Ryż. 11. Projekt prefabrykowanej dźwigni, która zawiera urządzenie do kompensacji obciążeń dynamicznych.
Ryż. 11. Projekt prefabrykowanej dźwigni, która zawiera urządzenie do kompensacji obciążeń dynamicznych.
na ryc. 11 przedstawia konstrukcję prefabrykowanej dźwigni, która zawiera urządzenie do kompensacji obciążeń dynamicznych działających w kierunku przeciwnym do działania siły technologicznej przenoszonej przez mechanizm dźwigni. Dźwignia ta zawiera ramiona prowadzące 1 i napędzane 2, połączone ze sobą przesuwną tuleją 3, przy czym ramię prowadzące 1 jest zamocowane na tulei, a napędzane ramię 2 obraca się na nim. Pierścienie toczne 4 są zamocowane pomiędzy końcami piast ramion 1 i 2. Kontakt ramion 1 i 2 odbywa się wzdłuż powierzchni podparcia 5 i 6. Na powierzchniach ramion 1 i 2 dźwigni wykonane są ucha 7 i 8, w których otworach osadzony jest kołek 9, który dociska ucha za pomocą nakrętek 11 poprzez wkładkę elastyczną 10 wykonaną w postaci tulei.
Podczas pracy mechanizmu, w skład którego wchodzi prefabrykowana dźwignia, siła technologiczna z ramienia napędowego 1 na ramię napędzane 2 przenoszona jest poprzez powierzchnie oporowe 5 i 6. W przypadku wystąpienia obciążeń dynamicznych podczas pracy mechanizmu w kierunku przeciwnym do kierunku pod działaniem siły technologicznej ramię napędzane 2 zaczyna odchodzić swoją powierzchnią 6 od powierzchni oporowej 5 dźwigni prowadzącej 1 i jednocześnie obraca się przeciwnie do ruchu wskazówek zegara względem ramienia prowadzącego 1. W efekcie wkładka elastyczna 10 zamocowana pomiędzy występami 7 i 8 jest ściśnięta i kompensuje wpływ obciążenia dynamicznego na mechanizm, a także skutecznie tłumi powstające drgania części mechanizmu.
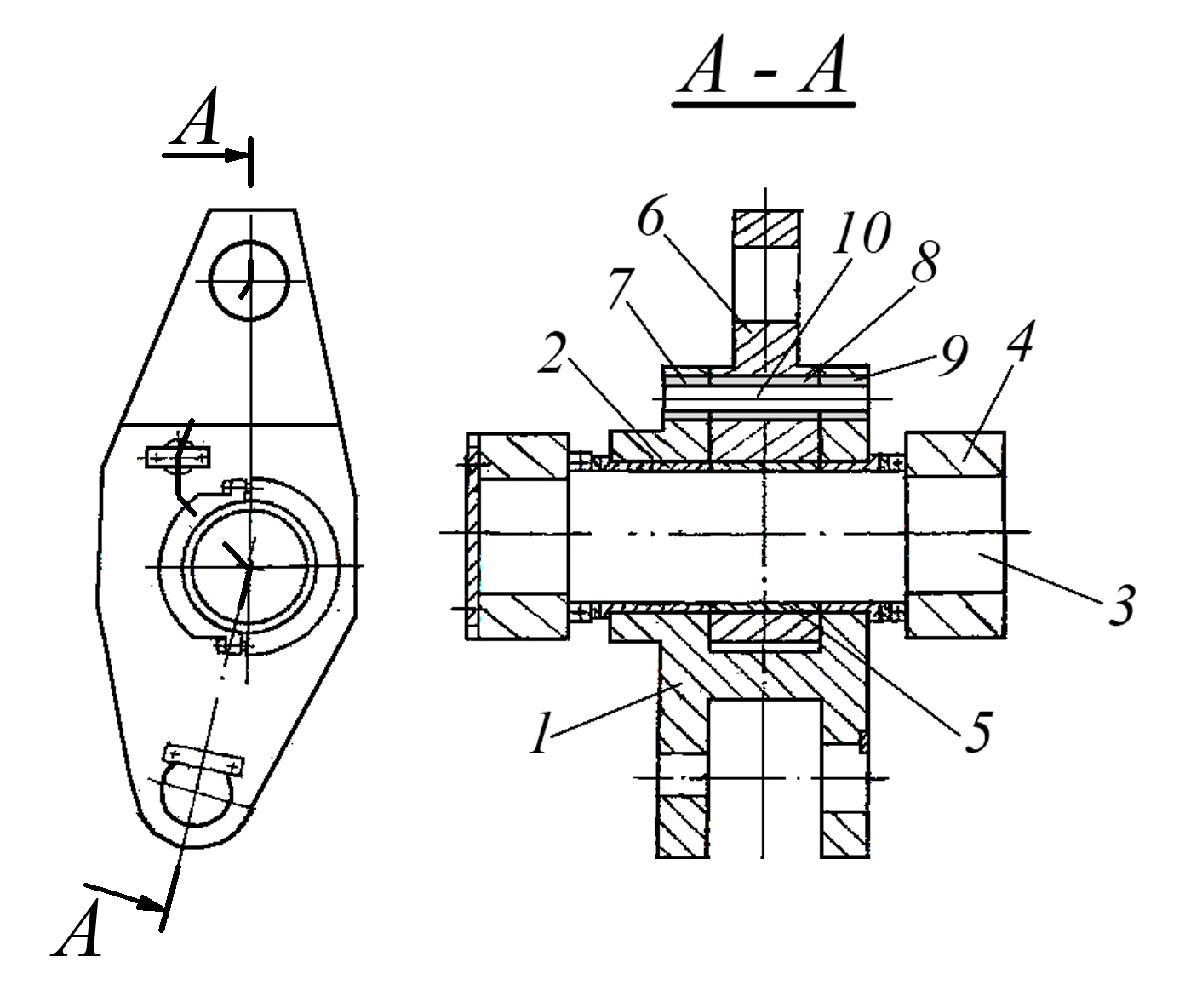
 Ryż. 12. Konstrukcja prefabrykowanej dźwigni, która zawiera rolkę skrętną
Ryż. 12. Konstrukcja prefabrykowanej dźwigni, która zawiera rolkę skrętną
do kompensacji obciążeń dynamicznych.
na ryc. 12 przedstawia konstrukcję prefabrykowanej dźwigni, która zawiera rolkę skrętną do kompensacji obciążeń dynamicznych działających w kierunku przeciwnym do działania siły technologicznej przenoszonej przez mechanizm dźwigni. Dźwignia ta składa się z ramienia napędowego 1, które jest sztywno połączone z tuleją 4, osadzonego obrotowo w podporach 2 i stykające się z dwoma napędzanymi ramionami dźwigni 3 znajdującymi się na jej końcach i połączonymi z nią za pomocą wałka skrętnego 5 umieszczonego wewnątrz rękaw. W tym przypadku napędzane ramiona 3 dźwigni poprzez uszczelki przeciwcierne 6 są dociskane do końców tulei 4 za pomocą kołków 7 i nakrętek 8. 4, wykonywane są wzajemne promieniowe rowki, tworzące szczeliny z końcami wypukłości promieniowe. Podczas montażu dźwigni jako części mechanizmu wałek skrętny 5 jest wstępnie skręcony w taki sposób, że szczelina między końcami promieniowych występów sworzni napędzanych ramion 3 a końcami odwrotnych promieniowych rowków tulei 4 jest wybierany, gdy stykają się podczas przenoszenia siły technologicznej przez dźwignię.
Podczas pracy mechanizmu, w skład którego wchodzi prefabrykowana dźwignia, siła technologiczna z ramienia napędowego 1 poprzez tuleję 4 i końce jej rowków promieniowych przenoszona jest na końce występów promieniowych na sworzniach ramion napędzanych 3, a te ostatnie wykonują ruch kołyszący, przenosząc go na ogniwo wyjściowe mechanizmu. W przypadku wystąpienia obciążenia dynamicznego, działającego w kierunku przeciwnym do działania siły technologicznej, ramiona napędzane 3 zaczynają obracać się w przeciwnym kierunku i dodatkowo skręcają rolkę skrętną 5, której odkształcenie sprężyste zmniejsza wpływ obciążeń bezwładnościowych na części mechanizmu.
 Ryż. 13. Konstrukcja zmontowanej dźwigni silnie obciążonego mechanizmu z wbudowanym zabezpieczeniem siły.
Ryż. 13. Konstrukcja zmontowanej dźwigni silnie obciążonego mechanizmu z wbudowanym zabezpieczeniem siły.
Rozważane bezpieczniki wbudowane w dźwignie są bezpiecznikami typu regeneracyjnego, co sprawia, że ich użycie jest dość efektywne, ale niestety ich zastosowanie jest niemożliwe w mocno obciążonych mechanizmach dźwigniowych. Zniszczalne bezpieczniki siłowe są wbudowane w dźwignie mocno obciążonych mechanizmów. pokazany na ryc. 13, zmontowana dźwignia z wbudowanym zabezpieczeniem siłowym zawiera ramię napędowe 1 osadzone wahliwie za pomocą tulei ślizgowej 2 na osi 3 sztywno zamocowanej na ramie 4, natomiast ramię napędzane 6 dźwigni jest również osadzone wahliwie za pomocą tulei ślizgowej na tej samej osi 3. Obie dźwignie połączone są za pomocą kołka ścinanego 10 zamocowanego w tulejach 7, 8 i 9 wciśniętego w otwór dźwigni napędowej 1 i otwór dźwigni napędzanej 6. Jeżeli Jeżeli siła przenoszona przez zmontowaną dźwignię przekroczy dopuszczalną wartość, to sworzeń 10 zostaje ścięty i połączenie ramienia napędzanego 1 z ramieniem prowadzącym 6 dźwigni zostaje przerwane, co zapobiega pękaniu bardziej skomplikowanych i kosztownych części mechanizmu.
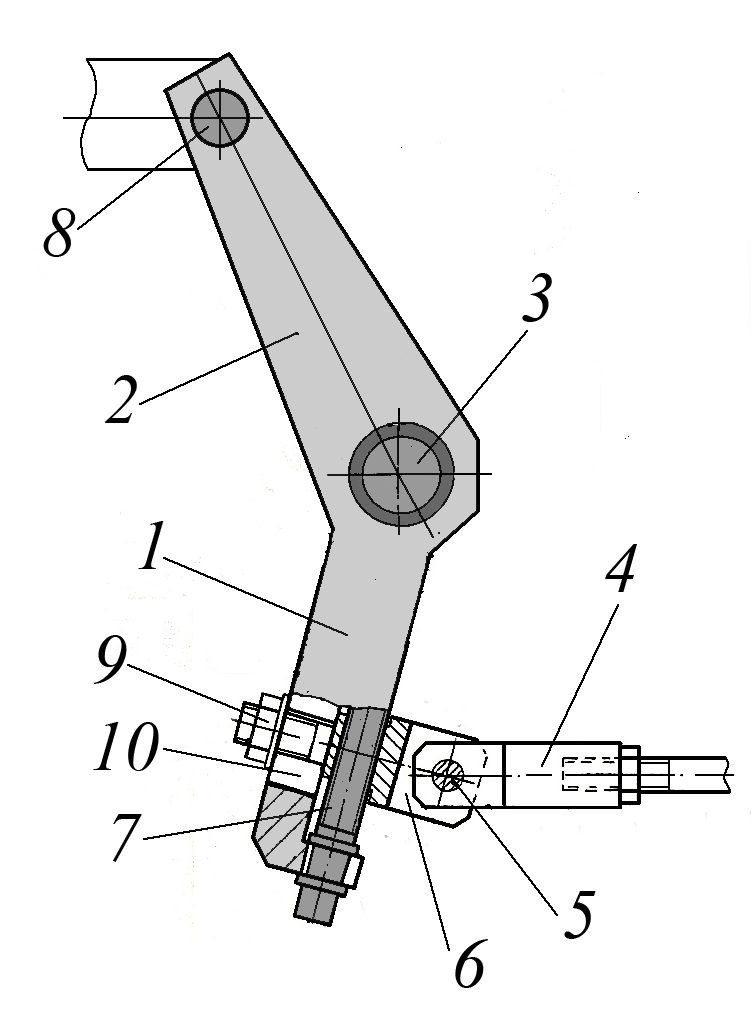 Ryż. 14. Urządzenie wbudowane w dźwignię lekko obciążonego układu zawieszenia umożliwiające regulację długości jego ramienia prowadzącego.
Ryż. 14. Urządzenie wbudowane w dźwignię lekko obciążonego układu zawieszenia umożliwiające regulację długości jego ramienia prowadzącego.
na ryc. 14 przedstawia urządzenie wbudowane w ramię lekko obciążonego układu zawieszenia, które umożliwia regulację długości jego ramienia prowadzącego. W tej dźwigni, składającej się z ramienia prowadzącego 1 i napędzanego 2 i osadzonego na osi 3, wbudowany jest palec 6, połączony obrotowo za pomocą osi 5 z drążkiem napędowym 4 i zamocowany w wymaganym położeniu w rowku 10 za pomocą nakrętki 9 i śruby regulacyjnej 7. Równocześnie napędzane ramię 2 dźwigni jest połączone obrotowo za pomocą osi 8 z napędzanym ogniwem mechanizmu dźwigniowego. Podczas regulacji długości ramienia prowadzącego 1 dźwigni odkręca się nakrętkę 9, następnie przesuwa się palec 6 w jedną lub drugą stronę wzdłuż rowka ramienia prowadzącego 1 dźwigni za pomocą śruby regulacyjnej 7, a następnie palec 6 jest następnie blokowany nakrętką 9.
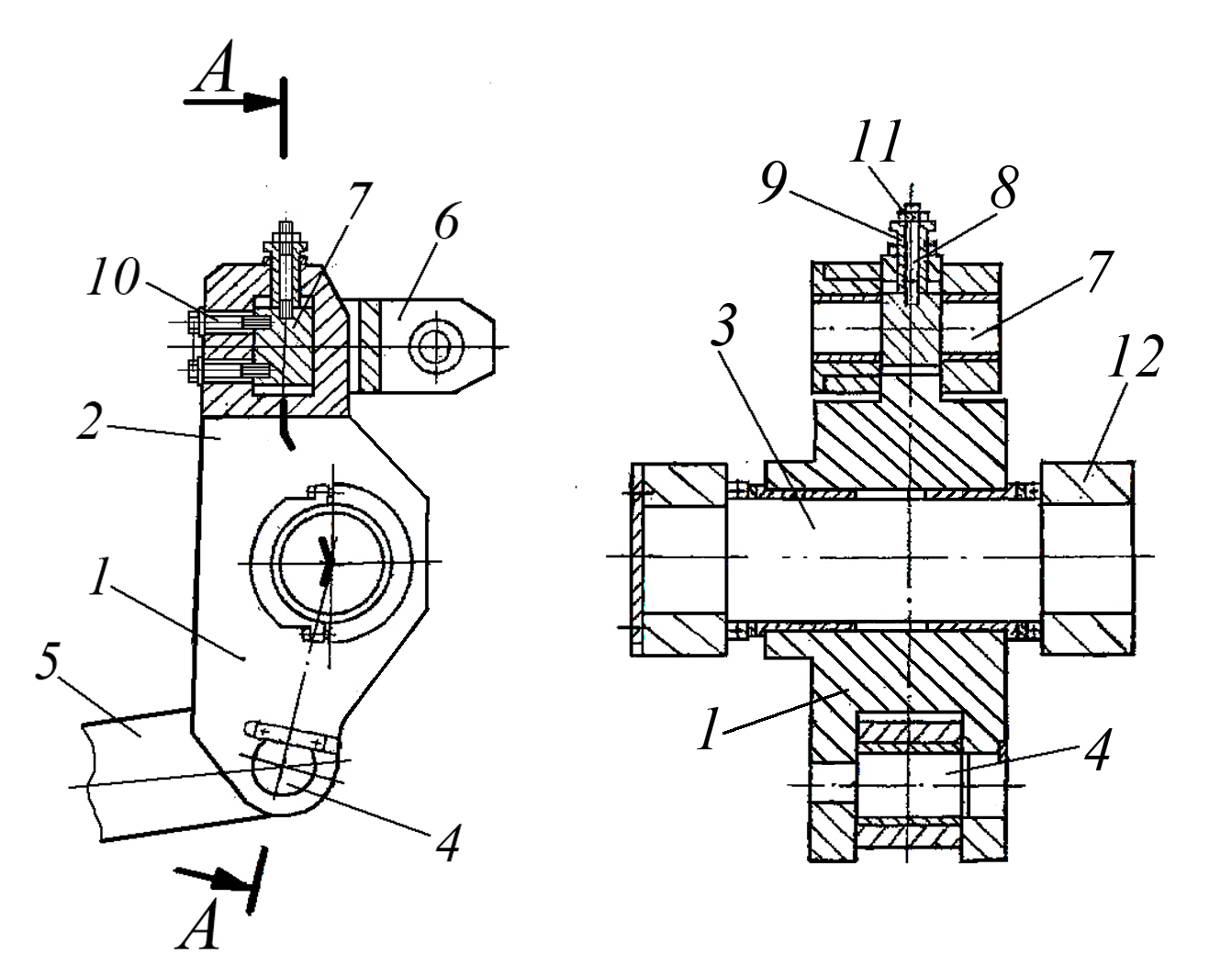 Ryż. 15. Konstrukcja urządzenia wbudowana w dźwignię mocno obciążonego układu zawieszenia, umożliwiająca regulację
Ryż. 15. Konstrukcja urządzenia wbudowana w dźwignię mocno obciążonego układu zawieszenia, umożliwiająca regulację
długość jego napędzanego ramienia.
na ryc. 15 przedstawia konstrukcję urządzenia wbudowanego w dźwignię mocno obciążonego mechanizmu łączącego, które umożliwia regulację długości jego napędzanego ramienia. W dźwigni tej, składającej się z ramienia prowadzącego 1 i napędzanego 2, połączonych obrotowo osią 4 z drążkiem napędowym i osadzonej na osi 3, oś 7 jest wbudowana, umieszczona w okienku jej ramienia napędzanego, który łączy ramię 2 z napędzanym prętem 6. W tym przypadku dźwignia osi 3 jest sztywno zamocowana w ramie 12. Oś 7 w swojej środkowej części ma kształt graniastosłupa i jest umieszczona w rowku napędzanego ramienia 2 dźwigni, co daje jej możliwość ruchu, co zapewnia zmianę jej odległości od osi 3. Ta konstrukcja osi 7, której ruch w rowku napędzanego ramienia 2 dźwigni odbywa się za pomocą trzpienia 8 i tulei gwintowanej 9 oraz zamocowanie w wymaganym położeniu za pomocą śrub 10 i nakrętek 11 pozwala na zmianę długości ramienia napędzanego 2 dźwigni, co jest niezbędne przy regulacji skoku ogniwa wyjściowego mechanizmu dźwigni, który obejmuje dźwignię.
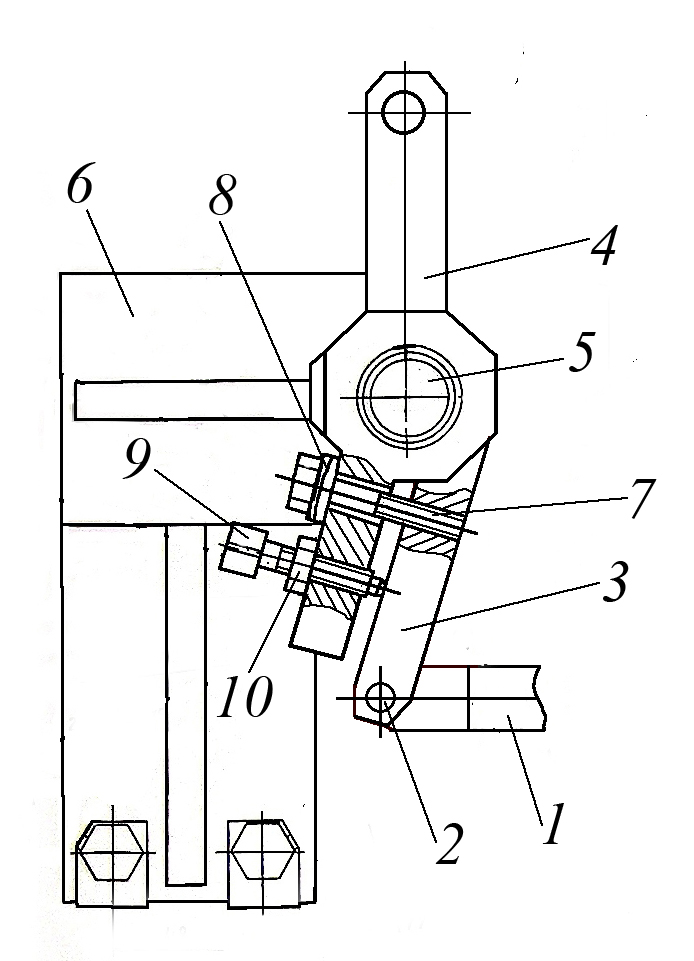
 Ryc. 16 Konstrukcja mechanizmu do regulacji długości ramienia dźwigni, podczas której nie zmienia się jego położenie kątowe.
Ryc. 16 Konstrukcja mechanizmu do regulacji długości ramienia dźwigni, podczas której nie zmienia się jego położenie kątowe.
Wadą konstrukcji urządzeń do regulacji długości ramienia dźwigni jest to, że po dokonaniu regulacji zmienia się położenie kątowe dźwigni względem osi obrotu, co w niektórych przypadkach jest niedopuszczalne. Rysunek 16 przedstawia konstrukcję mechanizmu do regulacji długości ramienia dźwigni, podczas którego jego położenie kątowe nie zmienia się. Mechanizm ten zawiera wał korbowy 1, na którego szyjce wału korbowego jest zainstalowany korbowód 2, który za pomocą palca - gąsienic 3 jest połączony obrotowo z pośrednią dwuramienną dźwignią 5, która za pomocą osi 6 , jest osadzony obrotowo na ramie (nie pokazano na Rys. 16) a jego napędzane ramię jest poprzez oś 7 połączone z napędzanym prętem 8. Jednocześnie sworzeń 9 jest osadzony obrotowo na dźwigni 5, w otworze którego śruba pociągowa 10 jest osadzona i zamocowana w kierunku osiowym, a jej gwintowany koniec współpracuje z gwintowanym otworem w sworzniu 3, który znajduje się z możliwością ruchu w promieniowym rowku 4 dźwigni 5 i jest zamocowany w w taki sam sposób, jak pokazano na rysunku 197. Długość ramienia prowadzącego dźwigni dwuramiennej 5 reguluje się obracając śrubą pociągową 10, w wyniku czego sworzeń 3 przesuwa się w promieniowym rowku 4, natomiast kształt promienia tego rowka zapewnia stałą pozycję dźwigni 5 podczas regulacji.
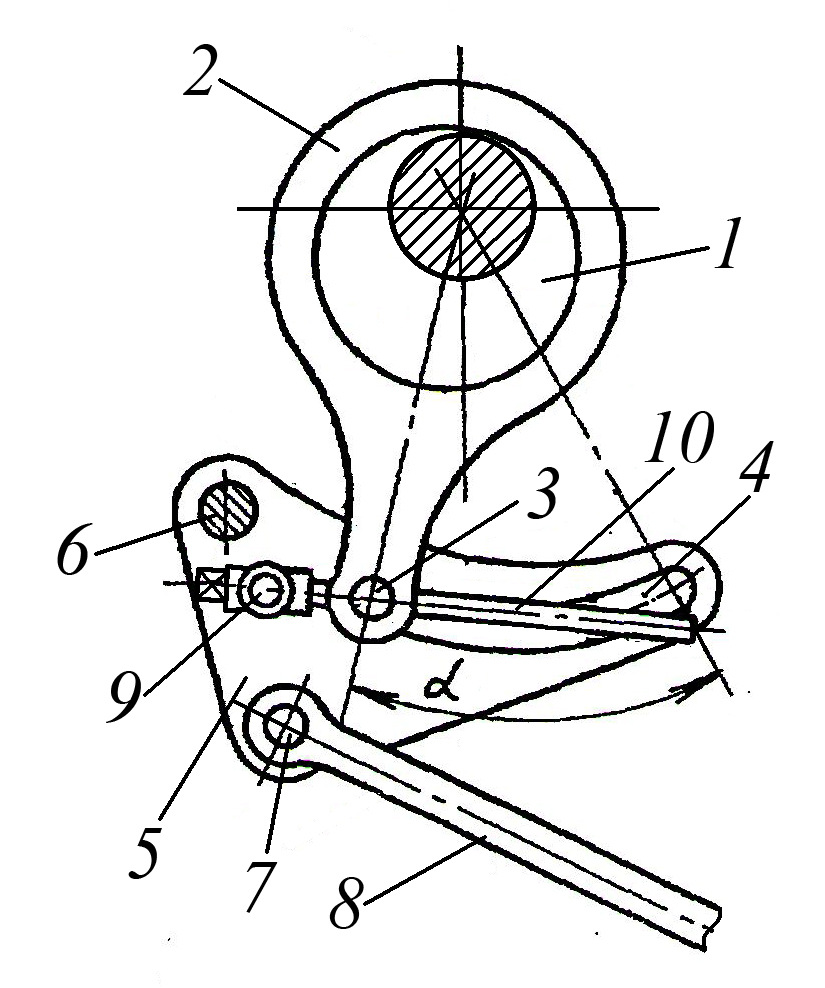
 Ryc. 17 Budowa urządzenia do regulacji położenia kątowego dźwigni względem jej osi wychylenia.
Ryc. 17 Budowa urządzenia do regulacji położenia kątowego dźwigni względem jej osi wychylenia.
W wielu mechanizmach wykonawczych i pomocniczych urządzeń technologicznych konieczna staje się regulacja położenia wyjściowego ogniwa wyjściowego, co można osiągnąć poprzez regulację położenia kątowego dźwigni, niezależnie od tego, czy jest to ogniwo wyjściowe, czy pośrednie mechanizm. Na rysunku 17 przedstawiono budowę urządzenia do regulacji położenia kątowego dźwigni względem jej osi wychylenia. Zawiera ono drążek prowadzący 1, który jest połączony obrotowo z wahaczem prowadzącym 3 za pomocą osi 2, która podobnie jak napędzana dwuramienna dźwignia 4, osadzona jest obrotowo na sworzniu 5 zamocowanym na wsporniku 6. Jednocześnie wahacz 3 i dwuramienna dźwignia 4 są sztywno połączone ze sobą za pomocą śruby 7 zamocowanej na dźwigni 4 za pomocą zestawu podkładek kulistych 8 i śruby oporowej 9, której położenie osiowe w dźwigni 4 jest ustalane nakrętką 10. Takie połączenie dźwigni 4 i kulisy 3 , z położeniem tej ostatniej bez zmian, umożliwia zmianę położenia kątowego dźwigni
ha 4, co odbywa się poprzez wkręcanie i wykręcanie śruby 7 i śruby 9.
Jednak ta regulacja pozwala na regulację położenia dźwigni w wąskim zakresie. Duży zakres regulacji położenia kątowego dźwigni można uzyskać przez regulację długości drążka napędowego, co jest przeprowadzane znanymi sposobami.
Ramiona wahadła
Wahacze, jak już wspomniano, są jedną z odmian dźwigni i są również szeroko stosowane w mechanizmach dźwigniowych. Stosuje się je w przypadkach, gdy bez zmiany kierunku ruchu konieczna jest zmiana jego wielkości lub uzyskanie bardziej złożonego prawa ruchu wiodącego ogniwa mechanizmu dźwigniowego. na ryc. 18 pokazuje kilka opcji wykorzystania wahaczy jako części mechanizmów dźwigniowych. na ryc. 18a przedstawia schemat kinematyczny mechanizmu dźwigniowego, którego wahacz łączy obrotowo korbowód napędowy z korbowodem napędzanym, zwiększając skok suwaka. na ryc. 18b, c, d przedstawia schemat kinematyczny mechanizmu dźwigniowego zawierającego wahacz pośredni i napędzany, natomiast obecność wahacza pośredniego pozwala na uzyskanie wymaganej zasady ruchu wahacza napędzanego. na ryc. 18b, oba wahacze są połączone obrotowo z napędzanym korbowodem mechanizmu łączącego, a na ryc. 18g, wahacz pośredni jest połączony jednocześnie z korbowodem napędowym i napędzanym, a wahacz napędzany jest połączony z korbowodem napędzanym.
.
 Ryż. 18. Schematy kinematyczne mechanizmów dźwigniowych zawierających
Ryż. 18. Schematy kinematyczne mechanizmów dźwigniowych zawierających
ramiona wahadła.
na ryc. 19 przedstawia konstrukcję podnośnika wykonanego na bazie mechanizmu dźwigniowego zawierającego wahacz jako główny element nośny. Zawiera stopkę podporową 1, która poprzez oś 2 jest połączona obrotowo z belką podporową 3, a ta ostatnia poprzez oś 5 jest połączona obrotowo z korbowodem 4, który jest połączony obrotowo z korbowodem 9 poprzez oś 8. Ponadto belka nośna 3 jest połączona obrotowo z korbowodem 6, a ten z kolei przez oś 10 jest połączony z korbowodem 9, a przez oś 11 z górnym butem nośnym 12 gniazdo. W tym przypadku osie 7 i 8 są połączone śrubą pociągową 14 z uchwytem 15, który styka się z osią 8 za pomocą połączenia gwintowego, a z osią 7 poprzez gładki otwór i występ 13. W w tym przypadku przegubowe połączenia wahacza 3 i korbowodów 4, 6 i 9 tworzą między sobą mechanizm równoległoboku, który wraz z połączeniem osi 7 i 8 za pomocą śruby pociągowej 14 umożliwia aby uzyskać przyrost siły i zapewnia równoległy ruch klocka 12, gdy jest on podnoszony i opuszczany.
Gniazdo działa w następujący sposób. Obrót uchwytu 15 wraz ze śrubą pociągową 14 zgodnie z ruchem wskazówek zegara prowadzi do zbieżności osi 7 i 8 w kierunku poziomym, natomiast wahacz 3 obracając się w kierunku przeciwnym do ruchu wskazówek zegara przesuwa korbowody 9 i 10 w taki sposób, że górna stopa podporowa 12 podnosi się wraz z podniesionym ładunkiem. Gdy uchwyt 15 ze śrubą pociągową 14 obraca się w przeciwnym kierunku, osie 7 i 8 rozchodzą się w kierunku poziomym, wahacz 3 obraca się zgodnie z ruchem wskazówek zegara, a korbowody 9 i 10, poruszając się odpowiednio, przesuwają stopkę podporową 12 razem z podniesionym wcześniej ładunkiem.
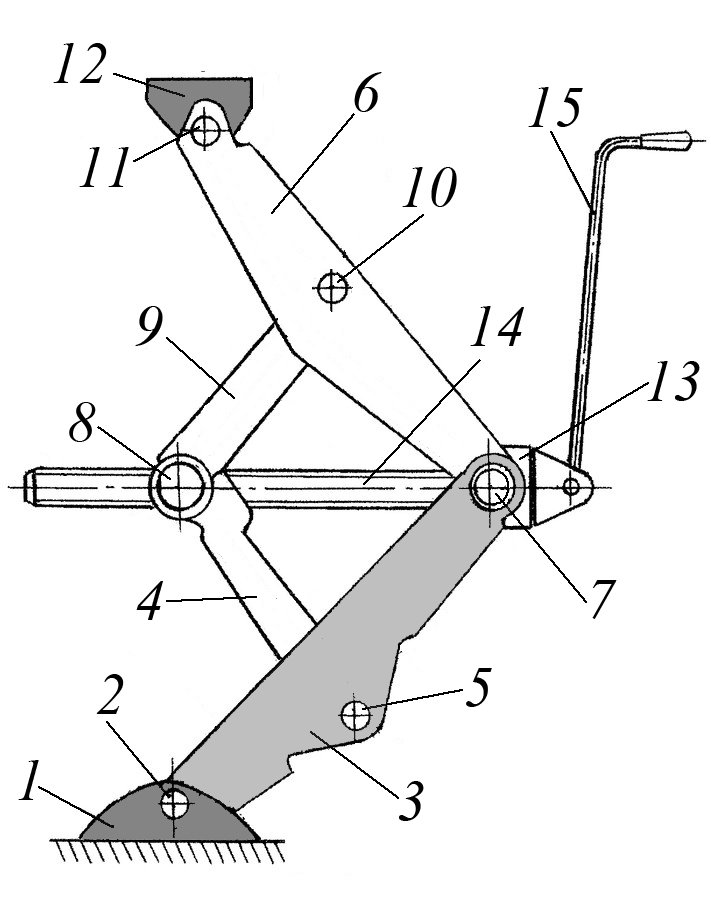 Ryż. 19. Projekt podnośnika wykonany na podstawie
Ryż. 19. Projekt podnośnika wykonany na podstawie
mechanizm dźwigniowy.
Montując kilka wahaczy na jednej osi, która jest zamontowana na stelażu, można je na nim sztywno zamocować, natomiast samą oś można osadzić na ramie za pomocą łożysk. na ryc. 20 przedstawiono konstrukcję zespołu sterującego hamulcami ciągnika, który jest wykonany na bazie kilku wahaczy umieszczonych na wspólnej osi mocowanej za pomocą wsporników na ramie. Zespół sterujący dźwigni ciągnika zawiera oś 2, zamocowaną za pomocą łożysk przegubowych 9 we wspornikach 1 zamocowanych na stałej podstawie, na której wielowypustowej powierzchni są sztywno zamocowane napędzane skrzydła 3 i 4, oraz zębatą sektor 6 z zapadką 12, która jest z nim połączona obrotowo, oraz przegubowo osadzone jest łącznik napędowy 5. Osiowe zamocowanie części zamontowanych na osi 2 odbywa się za pomocą pierścienia ustalającego 7 i oryginalnej nakrętki 14. Przeguby kulowe 9 uszczelnione są od wewnątrz mankietami 8, a od zewnątrz osłonami 10 wciśniętymi w obudowy 1. Ogniwo napędowe 5 i człon napędzany 4 połączone są z odpowiednimi drążkami sterującymi za pomocą przegubowych łożysk 13.
Jednostka sterująca hamulca działa w następujący sposób. Gdy łącznik napędowy 5 jest obracany zgodnie z ruchem wskazówek zegara, zapadka 12 poruszająca się po łuku, swoim ostrym końcem chwyta pewną liczbę zębów na sektorze zębatym 6, podczas gdy oś 2 wraz z napędzanymi wahaczami 3 i 4 oraz sektor przekładni 6 pozostaje nieruchomy. Gdy łącznik napędowy 5 jest obracany w kierunku przeciwnym do ruchu wskazówek zegara, zapadka opiera się ostrym końcem o odpowiedni ząb sektora 6 i w ten sposób powoduje, że wraz z osią 2 i napędzanymi wahaczami 3 i 4 obracają się w tym samym kierunku, co w wyniku czego te ostatnie przesuwają drążki sterujące hamulca (na ryc. 20 nie pokazano).
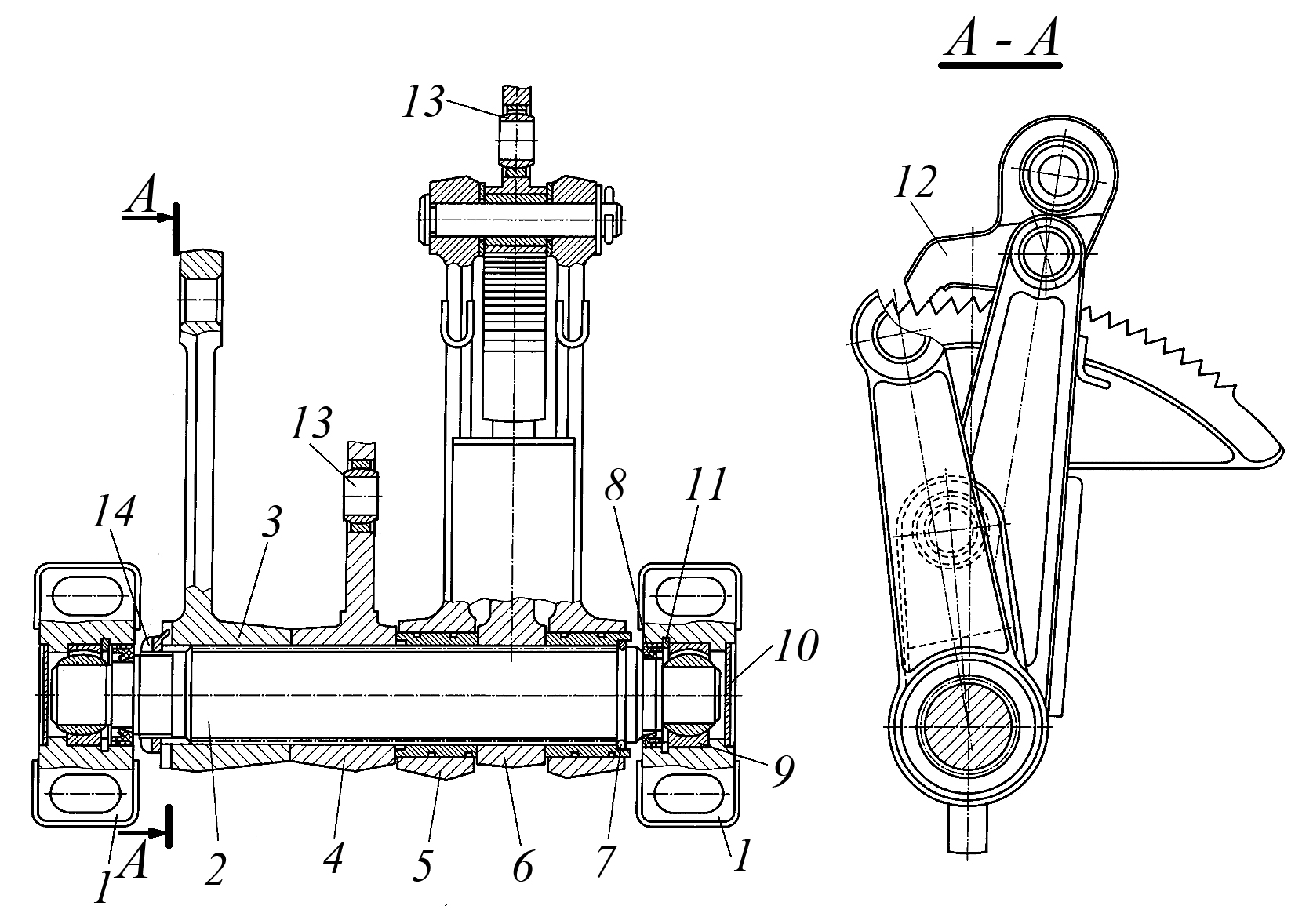 Ryż. 20. Wykonanie projektu zespołu sterującego hamulca ciągnika
Ryż. 20. Wykonanie projektu zespołu sterującego hamulca ciągnika
oparty na kilku wahaczach umieszczonych na wspólnej osi.
Skład wahaczy, a także skład dźwigni, mogą obejmować urządzenia rozszerzające możliwości mechanizmów dźwigniowych, które obejmują te dźwignie. Najczęściej są to urządzenia zmieniające wahacz lub jego położenie. na ryc. 21 przedstawia konstrukcję wahacza z regulowaną odległością od osi krętlika do osi wychylenia wahacza. Ten wahacz 1 jest wykonany z poprzecznymi szczelinami V
krok po kroku T
i podłużny rowek A
, w którym osadzony jest sworzeń 4 z kołnierzem B
i dwoma gwintowanymi końcami, natomiast na końcu sworzeń przechodzi w podłużny rowek A
podkładka pośrednia 2, podkładka oporowa 3 i nakrętka 5. W podkładce pośredniej 2 wykonany jest podłużny rowek, którego długość Ł
określa się według następującego wzoru: L = d + 2T/(T-t)t
Dodatkowo na podkładce pośredniej 2 wykonane są szczeliny od strony jej styku z wahaczem 1 G
krok po kroku T
na wahaczu wykonane są wzajemne szczeliny, a na przeciwległej powierzchni podkładki pośredniej 2 szczeliny D
krok po kroku T
, które stykają się z pasującymi splajnami mi
na podkładce oporowej 3. W dolnej części wahacza wykonany jest otwór 6, w który osadzona jest odpowiednia oś obrotu wahacza z zębatką stałą. Zgrubna regulacja odległości R
od osi krętlika do osi wychylenia wahacza następuje poprzez przesunięcie podkładki pośredniej 2 w rowku podłużnym A
wahacze i precyzyjna regulacja - poprzez wzdłużne przesunięcie podkładki nośnej 3 względem podkładki pośredniej 2 z powodu obecności w niej podłużnego rowka. W takim przypadku wartość korekty określa się według następującego wzoru:
????R = n1T – n2t;
Gdzie:
– n1
, liczba zębów, o które przesunięta jest podkładka pośrednia 2,
– n2
, liczba zębów, o które przesunięta jest podkładka oporowa 3.
Dla wygody regulacji położenia palca 4, na wahaczu 1 można zastosować skalę z odpowiednimi podziałami.
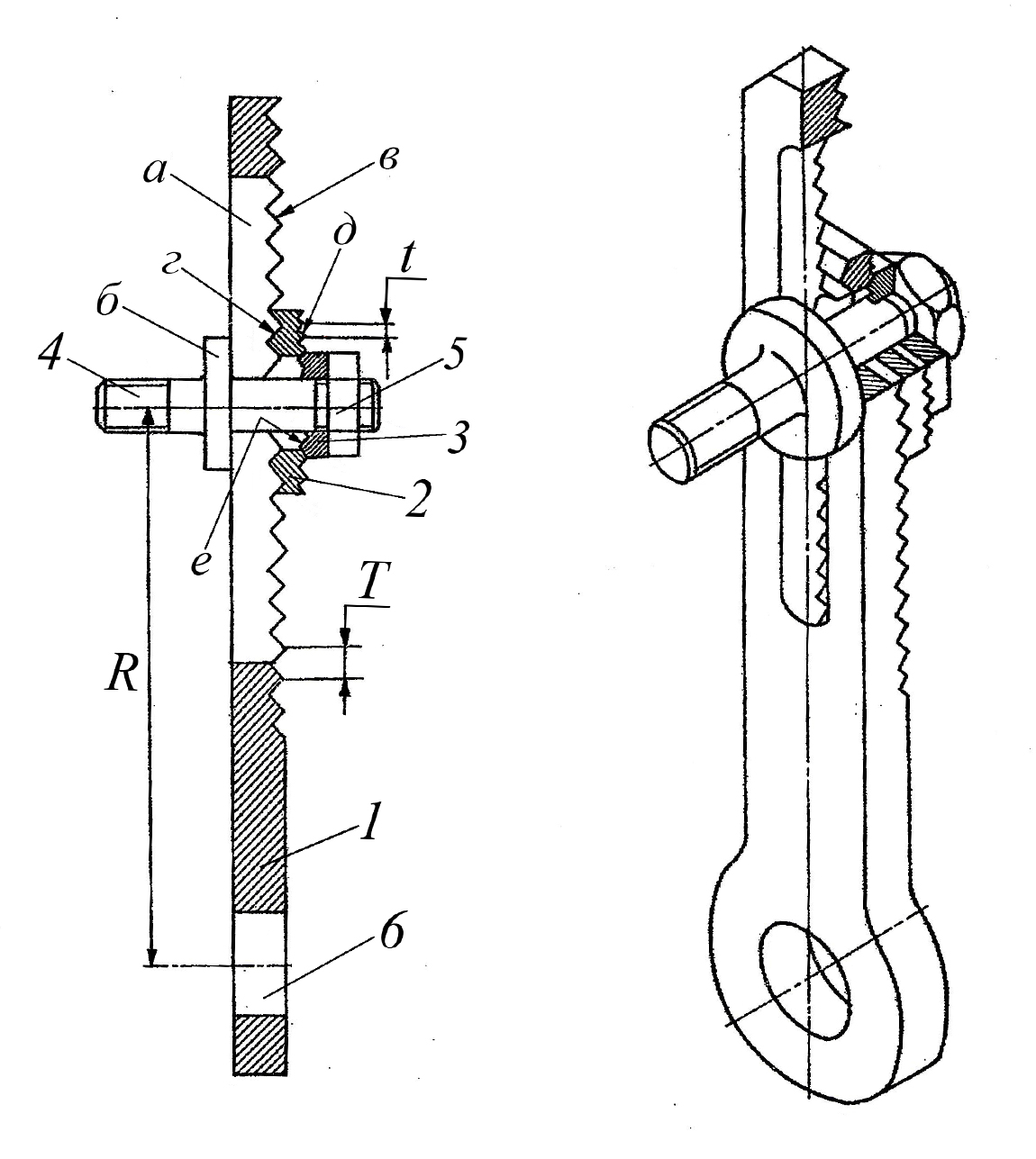 Ryż. 21. Konstrukcja wahacza z regulowaną odległością
Ryż. 21. Konstrukcja wahacza z regulowaną odległością
od osi obrotu do osi obrotu wahacza.
W niektórych mechanizmach dźwigniowych położenie kątowe wahacza jest kontrolowane przez obracanie osi jego obrotu. na ryc. 22 przedstawia konstrukcję osi obrotu bujaka, umożliwiającą regulację jego położenia. Aby wyregulować położenie wahacza, jego oś obrotu 2, zamocowana w otworach zębatki 1, jest wykonana z mimośrodową szyjką 3, na której zainstalowana jest mimośrodowa tuleja 5, której zewnętrzna powierzchnia kuli styka się z powierzchnią współpracującą wahacz 6. Jednocześnie na gwintowanym końcu osi 2 montowana jest podkładka i nakrętka do jej osiowego mocowania, a głowica osi znajdująca się na jej przeciwległym końcu jest wykonana w formie wielościanu, każda powierzchnia które w pewnym położeniu kątowym osi 2 mogą stykać się z powierzchnią współpracującą 7, wykonaną w postaci występu na zębatce 1. Aby wyregulować położenie osi wahania wahacza 6 oś 2 i tuleja mimośrodowa 5 są obracane, które można wykonać w tych samych lub różnych kierunkach.
 Ryż. 22. Konstrukcja osi obrotu wahacza, pozwalająca
Ryż. 22. Konstrukcja osi obrotu wahacza, pozwalająca
regulować jego położenie.
na ryc. 23 pokazuje projekt urządzenia wbudowanego w wahacz, który umożliwia płynną regulację jego położenia kątowego względem osi, na której jest zainstalowany. Urządzenie to wbudowane w wahacz 1, które jest połączone obrotowo za pomocą osi 2 z drążkiem napędowym mechanizmu dźwigniowego, składa się z ślimacznicy 3 umieszczonej w otworze wahacza oraz z jej wewnętrznymi wielowypustami 4 stykami wielowypustową powierzchnię osi 14, a także zazębia się ze ślimakiem 5 umieszczonym w otworze wahacza, wykonanym prostopadle do osi ślimacznicy. Jednocześnie prawy sworzeń ślimaka 5 z sześciokątnym końcem 6 w pokrywie 10, poprzez zespół rolek 9, styka się z tuleją 8, na której lewym końcu znajdują się zęby stożkowe 7, stykające się z współpracujące zęby wykonane na ślimaku 5, tworząc zazębienie. Lewy koniec ślimaka 5 z centralnym stożkowym otworem styka się z powierzchnią oporową podkładki elastycznej 12, która jest dociskana przez sprężynę 11 i pokrywę 13.
Regulacja położenia kątowego wahacza 1 względem osi 14 odbywa się w następujący sposób. Aby obrócić wahacz 1 w jednym lub drugim kierunku, ślimak 5 łba sześciokątnego 6 obraca się kluczem w pożądanym kierunku, podczas gdy jego obrót jest przenoszony na koło ślimakowe 3, które po zamocowaniu za pomocą wielowypustu połączenie na wale 14 pozostaje nieruchome, a wahacz 1 obraca się w żądanym kierunku po stronie, zmieniając swoje położenie kątowe względem osi 14.
Ryż. 23. Bujak z wbudowanym urządzeniem do jego regulacji
pozycja kątowa.
LITERATURA.
1. Ignatiew N. P. Podstawy projektowania Azow 2011.
2. Ignatiev N. P. „Projektowanie mechanizmów” Azov 2015
W artykule wykorzystano informacje z odpowiednich działów pracy autora” Podstawy projektowania» opublikowanej w 2011 roku i pracy autora „Projektowanie mechanizmów” opublikowane w 2015 roku
W podręczniku referencyjnym „Projektowanie mechanizmów” oprócz przykładów konstrukcji dźwigni i wahaczy zawiera:
– przykłady projektowe i zalecenia stosowania mechanizmów krzywkowych, mechanizmów o działaniu przerywanym oraz mechanizmów kombinowanych,
- przykłady konstrukcji i zalecenia zastosowania głównych rodzajów części ww. mechanizmów: wałów korbowych, korbowodów, suwaków, krzywek i ich przegubów obrotowych,
- zalecenia dotyczące wyboru rodzaju napędu mechanizmu i przykłady jego realizacji,
– obliczenia mechanizmów,
- przykład konstrukcji cyklogramu działania automatu krzywkowego,
– technika projektowania mechanizmów,
– zalecenia dotyczące przypisywania wymagań dokładności mechanizmom i ich typowym częściom,
– przykład konstrukcji mechanizmu
Aby zakupić pełną wersję artykułu dodaj go do koszyka,
Koszt pełnej wersji artykułu wynosi 50 rubli.