Ürün Açıklaması
Kaldıraç mekanizmaları, bölüm 6 Kaldıraçlar ve külbütör kolları
Krank mekanizmalarında, bir çıkış bağlantısı veya bir ara bağlantı olarak, kademeli olarak hareket eden bir sürgüden farklı olarak, onları çerçeveye bağlayan eksene göre bir sallanma hareketi gerçekleştiren kaldıraçlar, külbütör kolları veya sahne arkası kullanılır. Bununla birlikte, aynı tür hareketi gerçekleştirirken, kaldıraçlar, külbütör kolları ve sahne arkası, öncelikle amaca ve kapsama veya daha doğrusu kaldıraç veya krank mekanizmasının kullanıldığı teknoloji alanına bağlı olarak tamamen farklı bir tasarıma sahip olabilir. bu bağlantılar
Manivela- bu, sabit bir eksene eksensel olarak monte edildiğinde, kendisine göre bir sallanma hareketi gerçekleştirirken, çoğunlukla bir bağlantı çubuğundan veya çubuktan bir tahrik alırken, aynı zamanda eksenel olarak da bağlı olduğu bir kaldıraç mekanizmasının bir bağlantısıdır.
sallanan- Bu, sabit bir dingile monte edilmiş ve bir biyel veya çubuk tarafından tahrik edilen tek kollu bir kaldıraçtır.
Kaldıraçlar
Kollar, krank millerinden, bağlantı çubuklarından ve sürgülerden daha az olmamak üzere, kaldıraç mekanizmalarında kullanılır, çünkü bunlar yalnızca mekanizmanın işlevsel amacını yerine getirmesini sağlamakla kalmaz, aynı zamanda çıkış bağlantısıdır, ayrıca ara bağlantısı olarak, izin verirler. iletilen hareketin büyüklüğünü ve yönünü değiştirmek ve bazı durumlarda onu paralel veya dikey bir düzleme aktarmak.
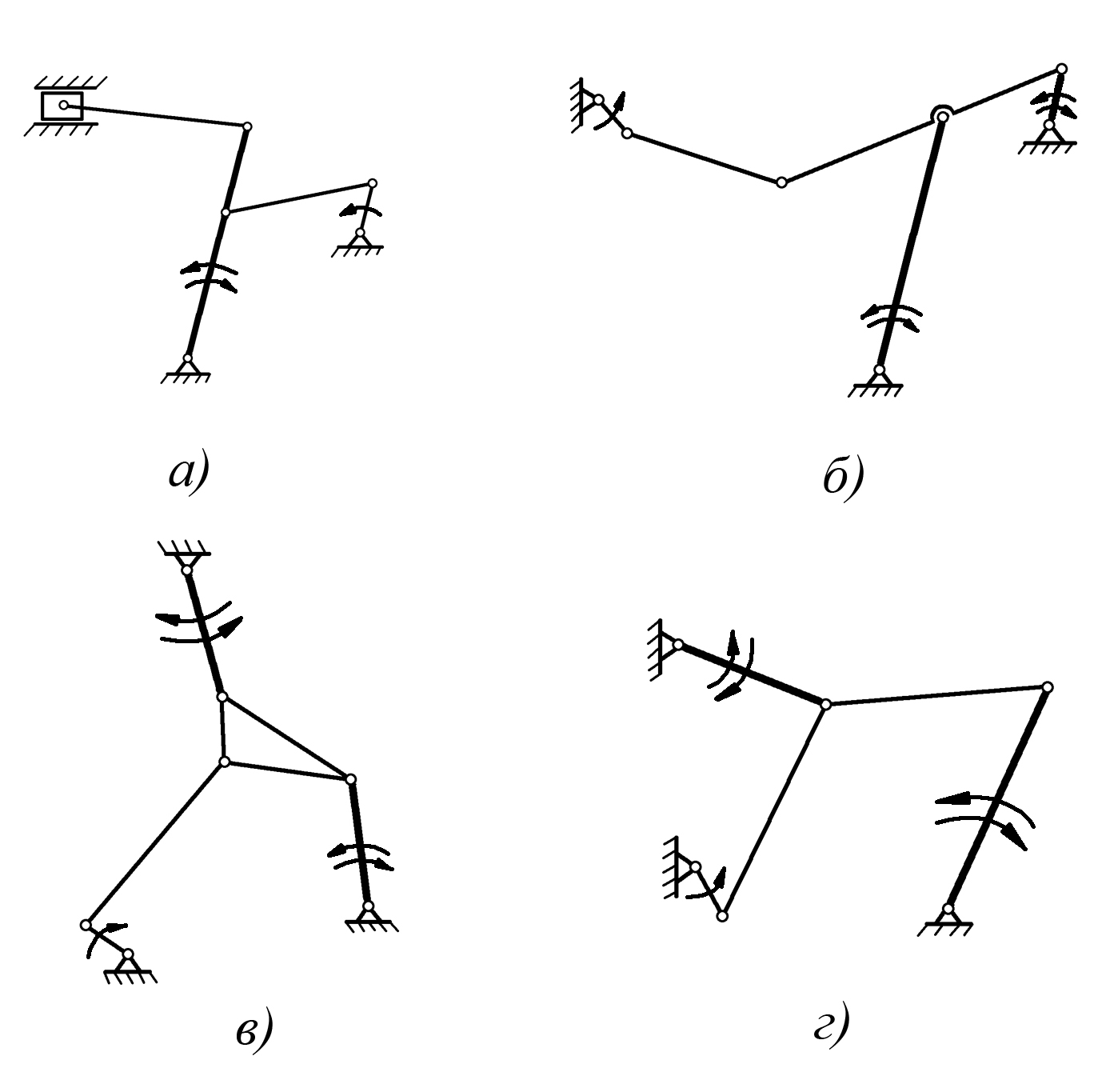
Şek. Şekil 1, makine mühendisliğinde en yaygın olarak kullanılan çeşitli kaldıraç tiplerinin tasarımını göstermektedir. Şek. 1 A iki kollu bir manivelanın tasarımı gösterilmiştir, bağlantı delikleri önde gelen ve tahrik edilen bağlantı ile salınım ekseninin bir tarafında bulunur. Şek. 1 B iki kollu bir kolun tasarımı gösterilmiştir, tahrik ve tahrik bağlantısı ile bağlantı delikleri salınım ekseninin farklı taraflarında bulunur. Şek. 1 v iki kollu bir kolun tasarımı gösterilmiştir, tahrik ve tahrik bağlantısı ile birbirine açılı olarak yerleştirilmiş ve salınım ekseninden farklı taraflarda bulunan bağlantı delikleri. Şek. 1 Güç kollu bir kolun tasarımı gösterilmektedir, tahrik ve tahrik bağlantısı ile bağlantı delikleri birbirine açılı olarak yerleştirilmiştir ve salınım ekseninin farklı taraflarında yer almaktadır. Şek. 1 D iki kollu bir manivelanın tasarımı gösterilmektedir, ön ve tahrikli bağlantıya bağlantı delikleri birbirine açılı olarak yerleştirilmiştir ve salınım ekseninin aynı tarafında yer almaktadır ve ön ve tahrik edilen kollar tek bir eleman şeklinde yapılmıştır. Şek. 1 e Ağır yüklü bir kaldıraç mekanizmasının iki kollu bir kaldıracının tasarımı gösterilmektedir; burada, çalıştırılan koldaki deliğin eksenine göre kaldıracın salınım ekseninin karşı tarafında bulunan tahrik edilen kollar, hareketi iletir. iki tahrikli çubuğa. Şek. 1 Ve birbirine açılı olarak yerleştirilmiş ön ve tahrik kollarının eksenleri kolun salınım eksenine dik olarak yerleştirilmiş deliklerden yapıldığı iki kollu bir kaldıraç gösterilmektedir. Şek. 1 Ve prefabrike bir yapıya sahip olan ve cıvatalarla sıkılmış terminal bağlantıları vasıtasıyla mile rijit bir şekilde sabitlenmiş ayrı parçalar şeklinde yapılmış bir tahrik ve bir tahrik kolundan oluşan iki kollu bir manivelanın tasarımını gösterirken, bir şaftın varlığı, kaldıraç kollarının eksenel yer değiştirmesi, kaldıracın hareketi paralel düzlemlerde iletmesine izin verir. Şek. 1 İleönceki örneğe benzer bir amaca sahip (iletilen hareketin paralel bir düzlemde yer değiştirmesi) olan, ancak döküm bir versiyonda yapılmış ve deliğinde uzun bir merkezi göbeğe sahip olan iki kollu bir kolun tasarımı gösterilmektedir. kolun çerçeveye sabitlenmiş bir eksene monte edildiği rulmanlar vardır.
Pirinç. 1. En çok kaldıraç tasarımı
makine mühendisliğinde yaygın olarak kullanılır.
Şekil l'de gösterilen kollar. 1 A–1zh kaynakla yapılan, genellikle tek ve küçük ölçekli üretimlerde kullanılmaktadır. Büyük ölçekli ve seri üretimde kaldıraçlar damgalama veya döküm yoluyla yapılır. Şek. Şekil 2 döküm kolların yapısını göstermektedir. Şek. 2 A bir helikopter eğik levhasında ve Şekil 1'de kullanılan bir dökme kol. 2 B Bir arabanın süspansiyonunda kullanılan dökme kol.
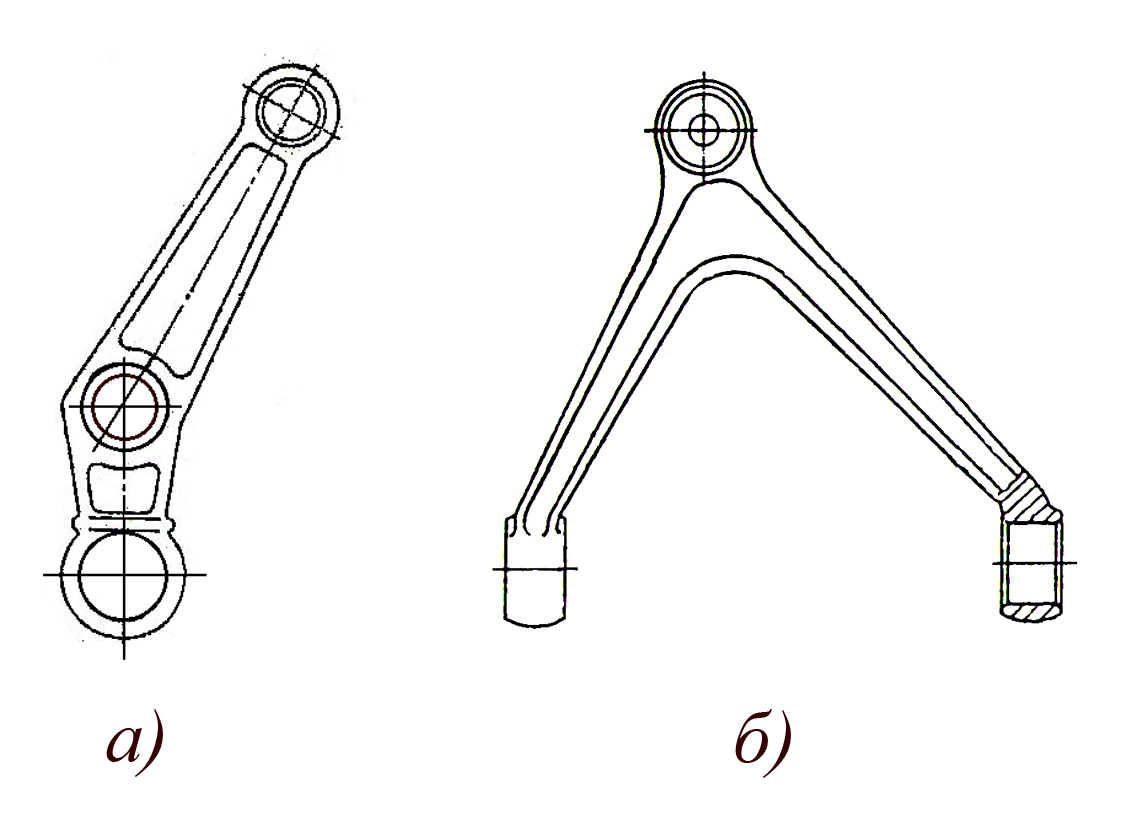 Pirinç. 2. Döküm kol tasarımı
Pirinç. 2. Döküm kol tasarımı
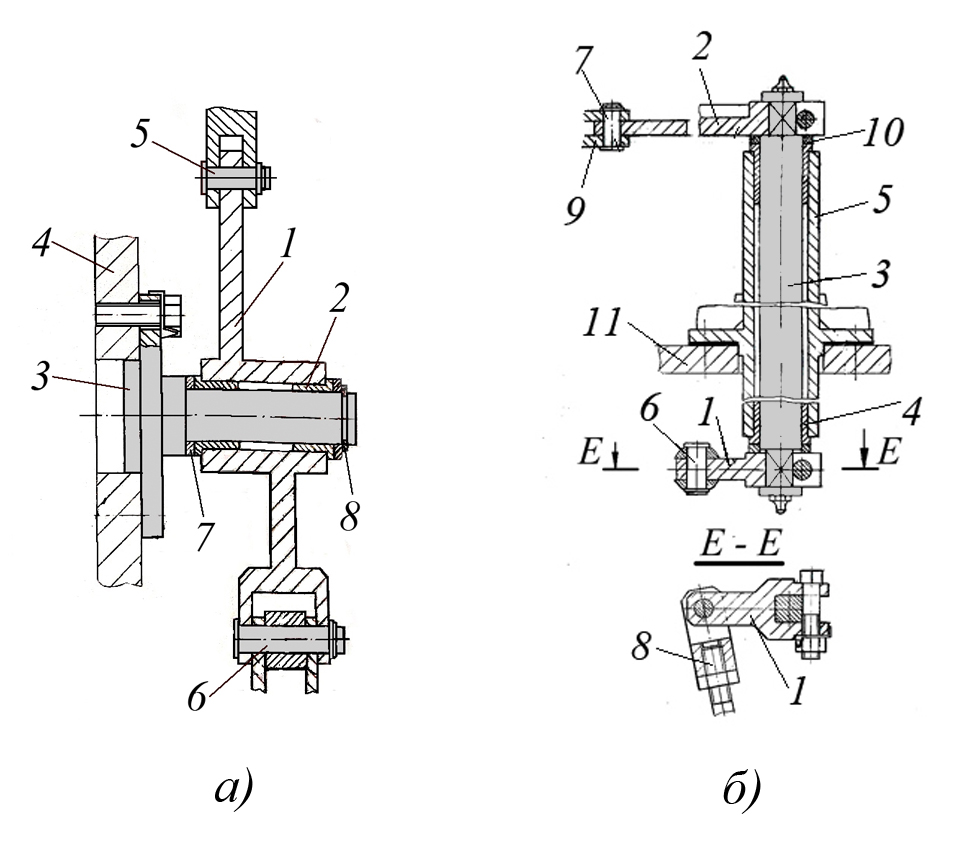
Bazı durumlarda, kaldıraçlar, hareketi bir kayma ile paralel bir düzleme aktarmanıza izin veren bir ara bağlantı olarak kullanılır. Şek. 3 A kolun tasarımı gösterilmektedir, bu amaçla yönlendirme ve tahrik kolları birbirine paraleldir ve belirli bir mesafe ile yer değiştirmiştir. Bu durumda, kaymalı yataklar (2) üzerindeki kol (1), gövde parçasına (4) sabitlenmiş olan eksen (3) üzerine eksenel olarak monte edilirken, tahrik ve tahrik edilen manivela kollarının deliklerinde bulunan eksenler (5 ve 6) onu ilgili baklalara bağlar. kolu içeren kaldıraç mekanizması. Kolun 1 aks 3 üzerindeki tam konumu için ayar halkaları 7 takılır ve kolun aks üzerindeki kilitlenmesi tespit halkası 8 tarafından gerçekleştirilir.
 Pirinç. 3. Omuzları birbirine paralel olan kolların tasarımı
Pirinç. 3. Omuzları birbirine paralel olan kolların tasarımı
arkadaş ve belirli bir mesafe ile yer değiştirirler.
Şek. 3 Bön 1 ve tahrik 2 kollarından oluşan ve terminal bağlantıları aracılığıyla şafta 3 sağlam bir şekilde sabitlenmiş prefabrik kolun tasarımı gösterilmektedir. Yataklar 4 üzerindeki makara 3, teknolojik ekipmanın çerçevesi 11 üzerine sabitlenmiş braketin 5 deliğine takılır Kolun tahrik kolu 1, eksen 6 boyunca tahrik çubuğuna 8 döner şekilde bağlanır ve tahrik edilen kaldıracın kolu 2, eksen 7 vasıtasıyla kaldıraç mekanizmasının tahrik edilen bağlantısına 9 eksensel olarak bağlanmıştır. Silindirin (3) brakete (5) göre konumu ayarlama halkaları (10) tarafından sağlanır.
 Pirinç. 4. Prefabrik kaldıraçların tasarımı.
Pirinç. 4. Prefabrik kaldıraçların tasarımı.
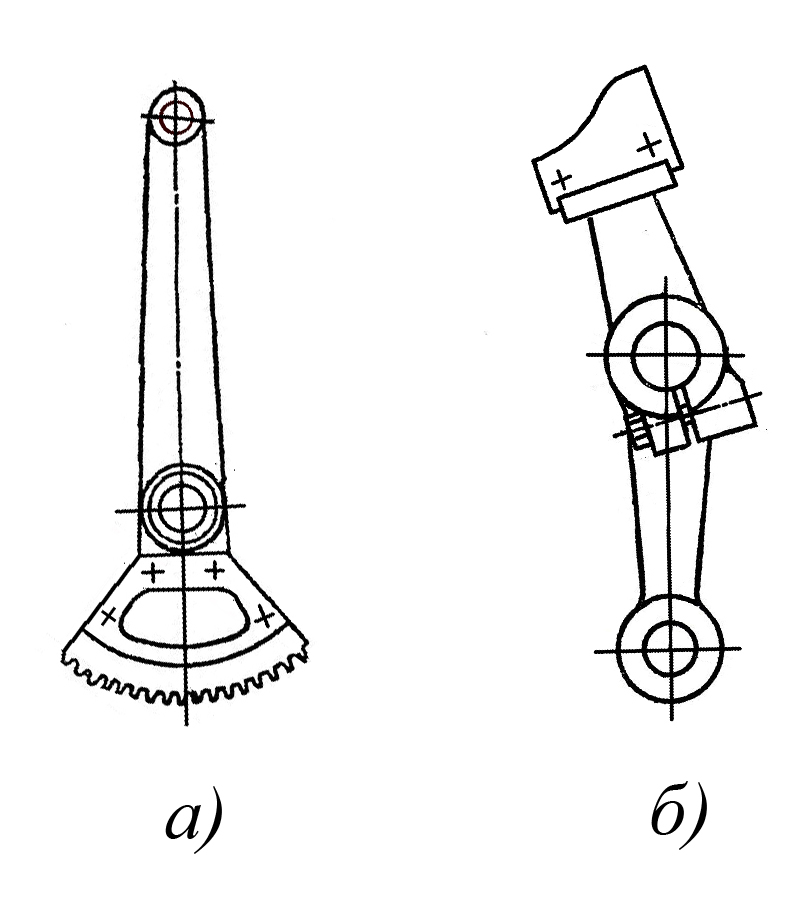
Otomatik ekipmanlarda, bağlantı mekanizmaları genellikle dişliler ve kam mekanizmaları ile birlikte kullanılırken, bunlar prefabrik kaldıraçları içerebilir. Şek. Şekil 4, bu tür kaldıraçlar için tasarım seçeneklerini göstermektedir. Şek. 4 A Kolun kendisi ve üzerine sabitlenmiş dişli sektöründen oluşan prefabrik kolun tasarımı gösterilmektedir. Şek. 4 B Kol ve üzerine sabitlenmiş düz kamdan oluşan prefabrik kolun tasarımı gösterilmektedir. Her iki durumda da, hem dişli sektörünün hem de kamın güvenilir ve doğru bir şekilde sabitlenmesi için, manivelada karşılık gelen merkezleme ve yerleştirme yüzeyleri sağlanmıştır.
 Pirinç. 5. Teçhizat işlemede kullanılan kaldıraçların tasarımı.
Pirinç. 5. Teçhizat işlemede kullanılan kaldıraçların tasarımı.
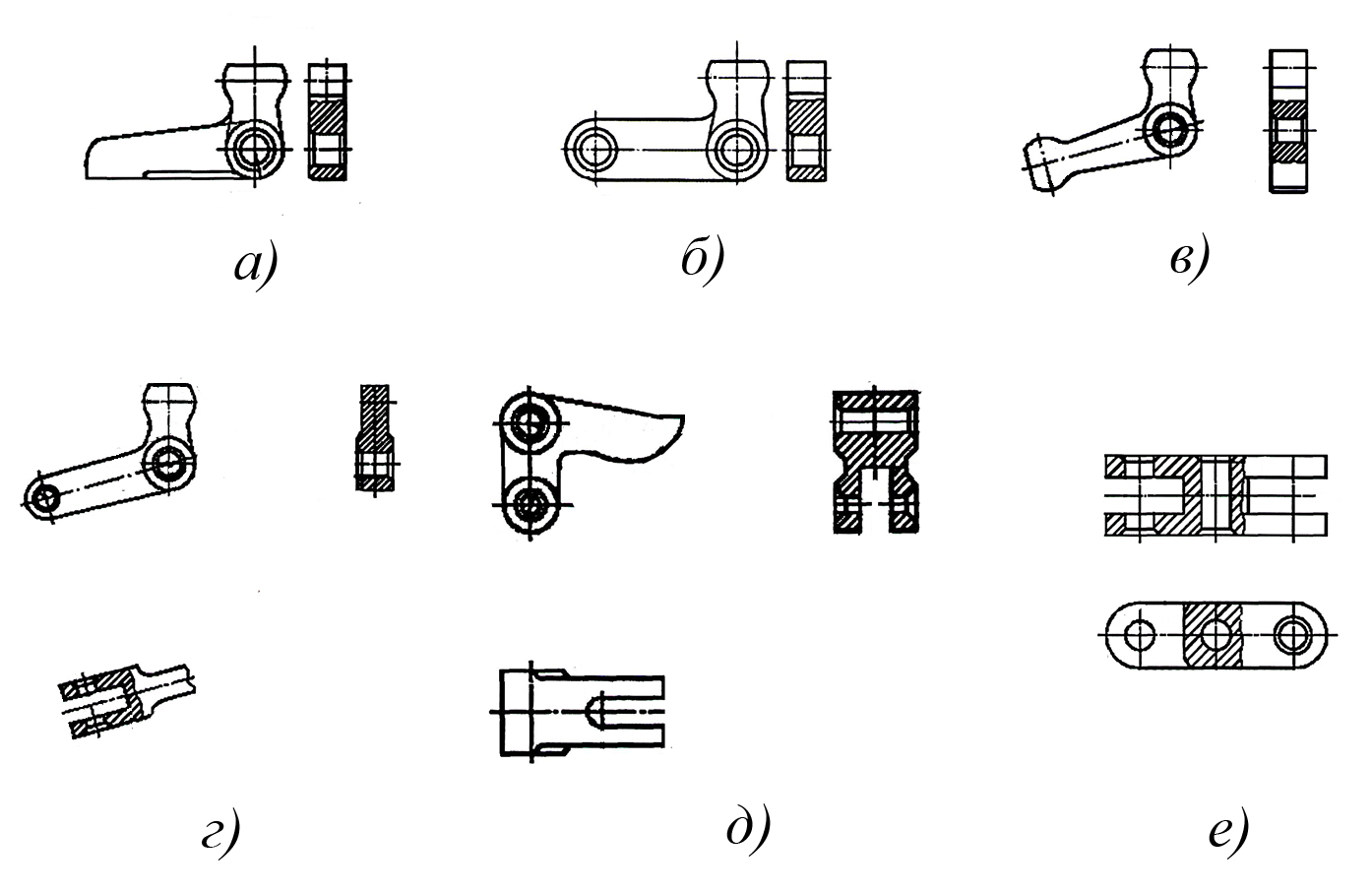
Çeşitli tasarımlara sahip kaldıraçlar, işleme fikstürlerinde yaygın olarak kullanılmaktadır. Şek. Şekil 5, işleme fikstürlerinde kullanılan standart kol tasarımları için seçenekleri gösterir:
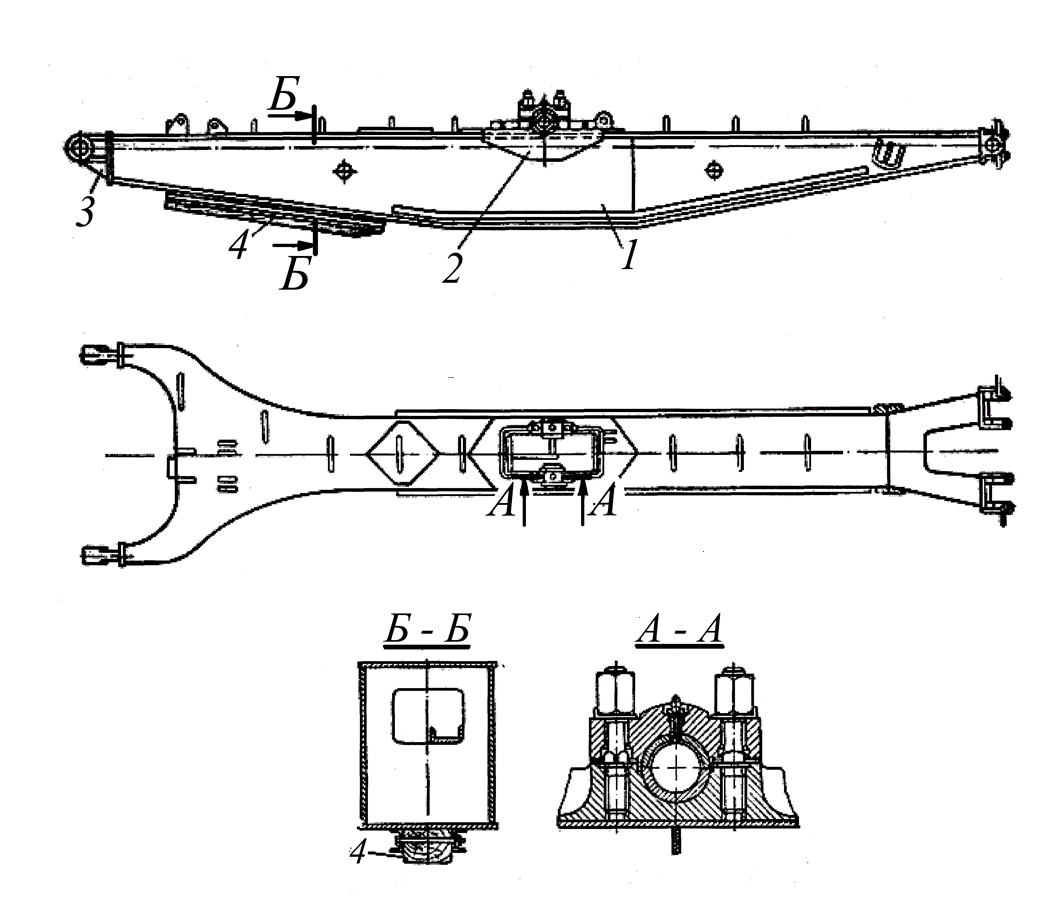
Kaldıraç mekanizmaları, inşaat ve yol ekipmanlarında (vinçler, ekskavatörler, buldozerler) yaygın olarak kullanılmaktadır, bu durumda, bileşimlerinde bulunan kaldıraçlar, birkaç metreden onlarca metreye kadar genel boyutlara sahiptir ve bu nedenle kaynakla üretilir. Şek. Şekil 6, kiriş 1, yatak milini, amortisörü 3 ve topuk 4'ü monte etmek için braket 2'den oluşan kaynaklı ekskavatör bomunun tasarımını göstermektedir.
 Pirinç. 7. Kauçuk-metal konstrüksiyonlar
Pirinç. 7. Kauçuk-metal konstrüksiyonlar
döner eklemler.
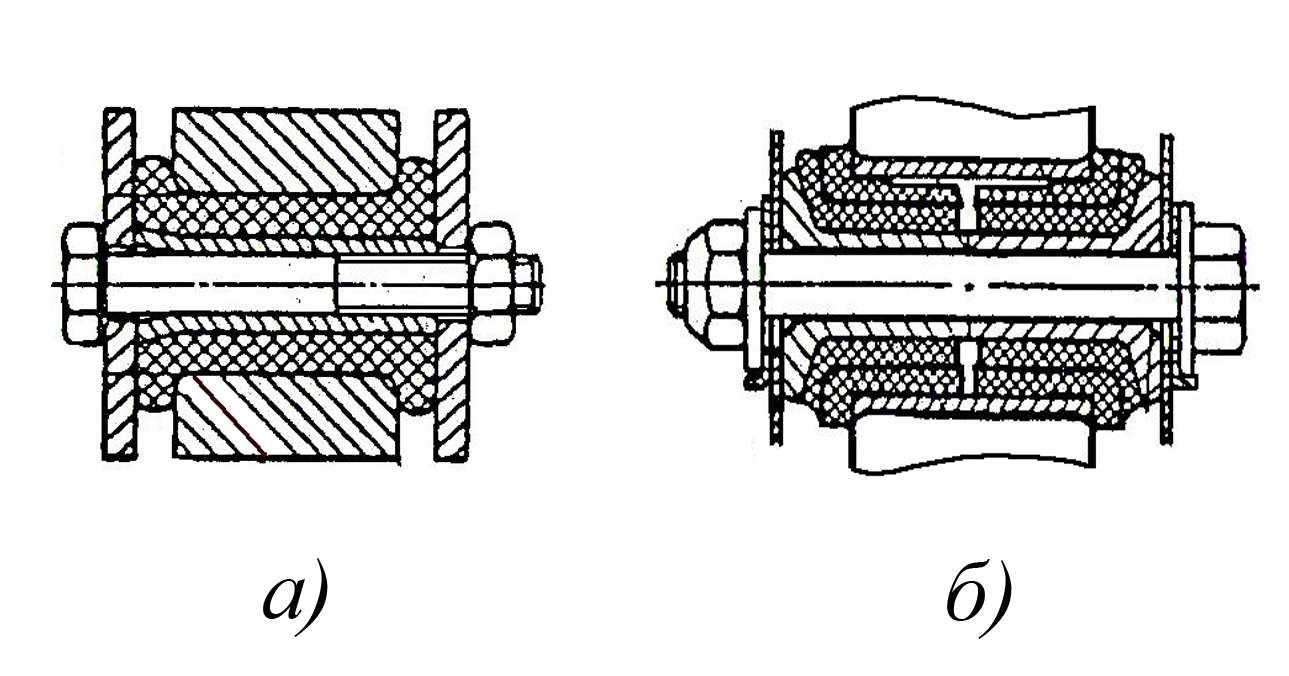
Kolların bağlantı çubuklu ve çubuklu döner mafsalları, tasarımları "Döner Mafsallar" makalesinde tartışılan düz ve makaralı yataklar, iğneli yataklar, orijinal ve standart bilyeli mafsallar kullanır. Bazı durumlarda, bir biyel kolu veya çubuklu kaldıraçların döner mafsalları, yalnızca enine kuvvetlere maruz kalmaz, aynı zamanda, örneğin bir araba süspansiyonundaki çubuklu kolların döner mafsallarında meydana gelen burulmada da çalışır. Bu durumlarda kauçuktan metale bağlantılar kullanılır (bkz. Şekil 7).
 Pirinç. 8. Kolları mile monte etme seçenekleri.
Pirinç. 8. Kolları mile monte etme seçenekleri.
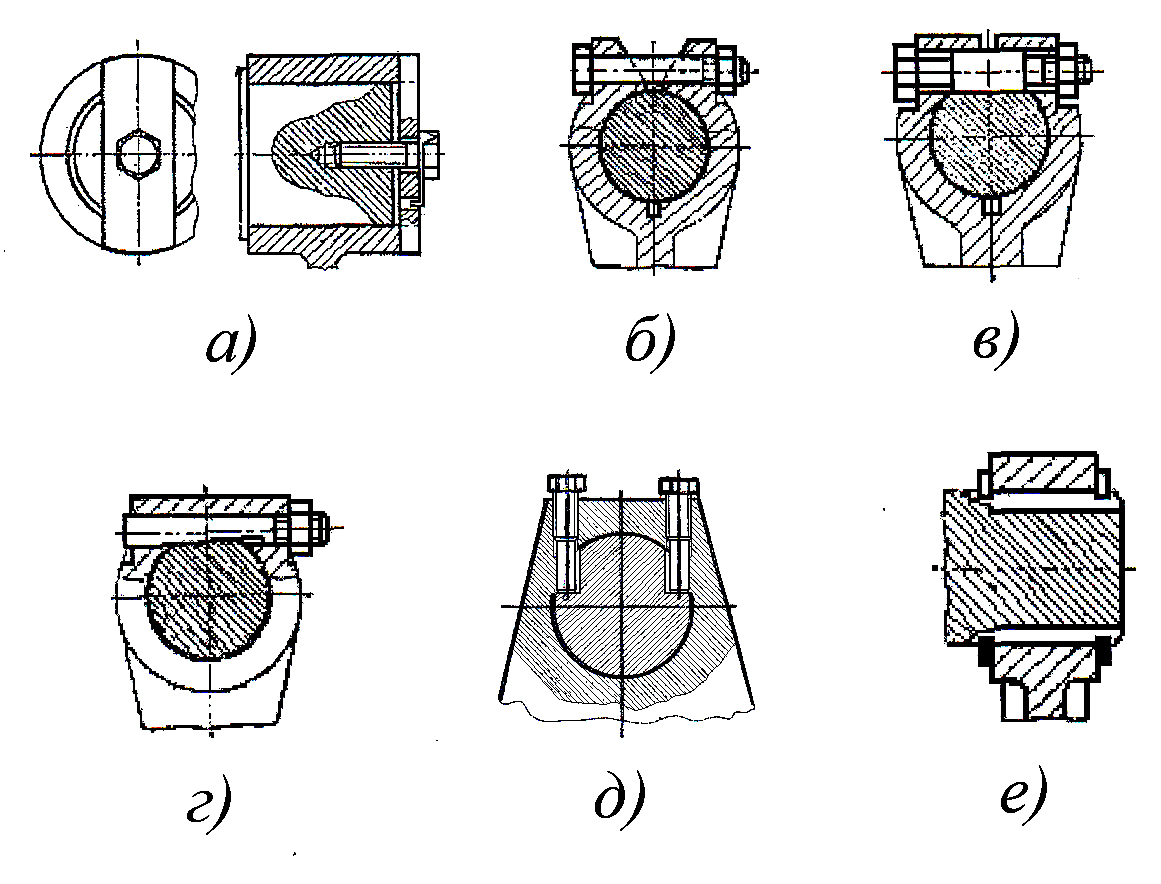
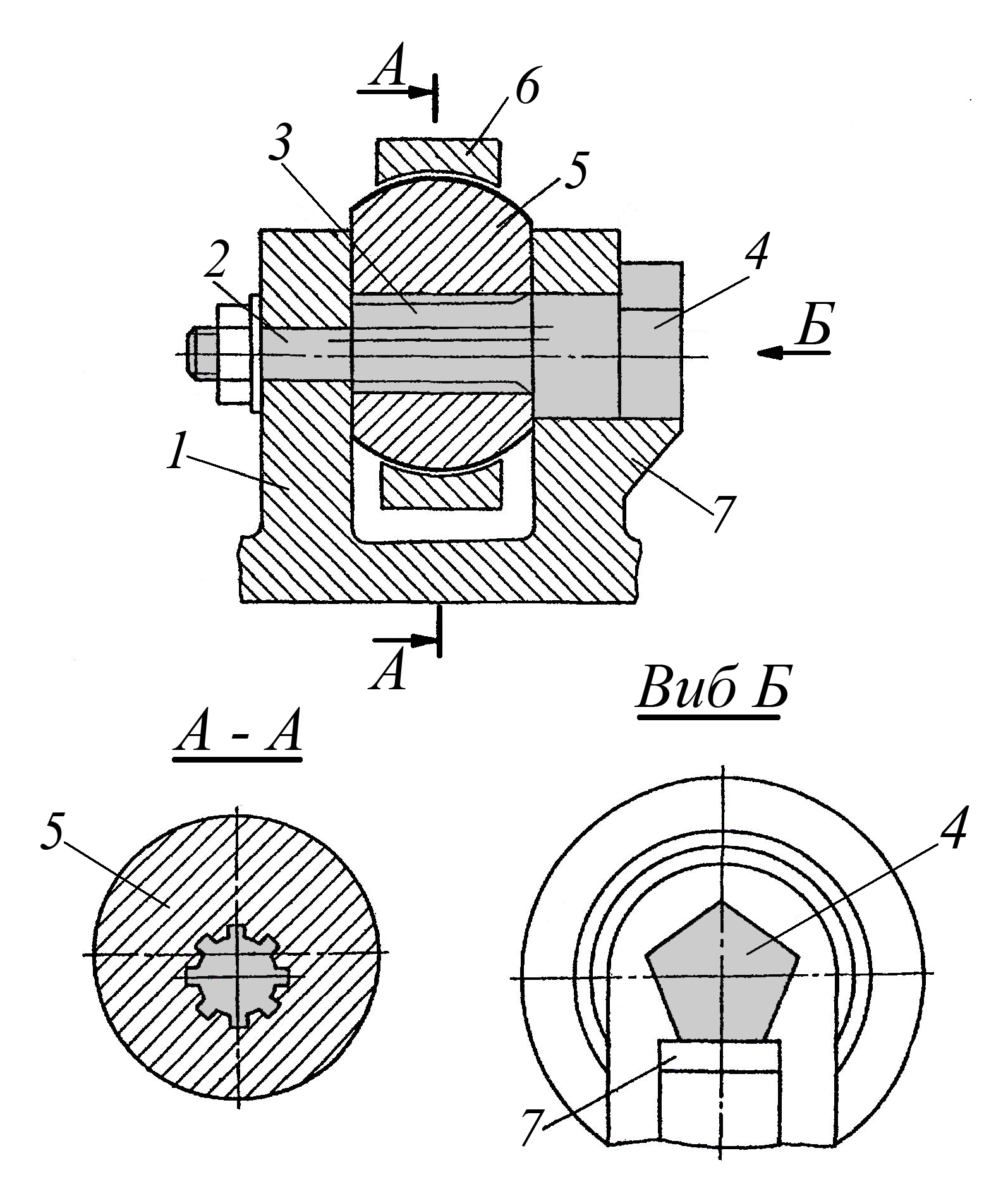
Yalnızca kaldıraç mekanizmasının kaynağını değil, aynı zamanda performansını da büyük ölçüde belirleyen önemli bir unsur, kolun şaft ile bağlantısıdır. , ona tork iletir. Bu bağlantı, çalışma sırasında temas eden yüzeylerin boşluğunun, erken aşınmasının veya ezilmesinin yanı sıra demontaj ve montajının basitliğini ve rahatlığını ortadan kaldırmalıdır. Bu tür bağlantıların örnekleri Şekil l'de gösterilmektedir. 8. Şek. 8 A kolun, torkun rondela ile birleştirilmiş uç kaması aracılığıyla iletildiği mile montajını gösterir. Bu bağlantı, düşük hızlarda ve değişen yüklerde çalışan kaldıraç mekanizmalarında kullanılır. Bu durumda, uç kaması genellikle 45 çelikten yapılır ve HRC 35-40 birim sertliğe kadar sertleştirmeye tabi tutulur, H11 / d11'e uyması için mil ve kol üzerine takılır. Bağlantının üretimi kolaydır ve kullanımda güvenilirdir. Şek. 8 B milin kol ile terminal bağlantısı gösterilmektedir; burada, bir bağlantı cıvatası ile sıkıldığında oluşan, milin dış yüzeyi ile kol deliği arasındaki sürtünme kuvvetleri nedeniyle tork iletimi gerçekleştirilir. Şaftın daha iyi kıvrılması için, merkezi oluk kaldıraçta frezelenmiştir. Bir önceki gibi bağlantı, düşük hızlarda ve değişken yüklerde çalışan mekanizmalarda kullanılır. Şek. 8 v burada mil kelepçesinin bir cıvata vasıtasıyla sabitlendiği bir bağlantı gösterilmektedir; bunun orta kısmı olağan duruma göre daha hassas yapılmıştır ve üzerinde yapılmış açık bir silindirik oluğun birleşme yüzeyine sıkıca bastırılmıştır. şaft. Böyle bir cıvata 45 çelikten yapılmış ve HRC 35 - 40 birim sertliğe kadar sertleştirilmiştir ve orta kısmı H11 / d11'e göre mile monte edilmiştir. Bağlantı, önemli torkları iletmek için kullanılabilir. Şekil l'de gösterilen bağlantı 8 D. İçinde tork iletimi, iki ayar cıvatasının sıkılması ve bu cıvataların milin düz yüzeylerine dayandırılmasıyla oluşturulan, mil ile kol arasındaki sürtünme kuvvetleri aracılığıyla gerçekleştirilir. Bu bağlantı tasarımında, cıvatanın mil ile temas halindeki gövdesi de HRC 35–40 birim sertliğe kadar sertleştirilmiştir. Şek. 8 G torkun milden kola iletiminin, mil üzerinde yapılan karşılıklı düz ile temas nedeniyle kolu sabitleyen bir kama ekseni vasıtasıyla gerçekleştirildiği bir bağlantı gösterilmektedir. Bu bağlantı, yüksek hızlarda ve yüklerde çalışan kaldıraç mekanizmalarında kullanılır. Önemli hızlarda değişen dinamik yükler koşulları altında çalışan kaldıraç mekanizmalarında, bunların mile bağlantıları, Şekil 1'de gösterilen yan yüzeyde ortalanmış bir yivli bağlantı kullanılarak gerçekleştirilir. 8 e. Maniveladaki dahili yivler çekilerek yapılır, bu nedenle, bu tür manivela bağlantılarının bir şaft ile bireysel veya küçük ölçekli üretimi durumunda, kıvrık yivlerin kullanımı ekonomik olarak haklı olmayabilir.
Kaldıraçları içeren ve esas olarak kullanıldıkları teknoloji alanına bağlı olan kaldıraç mekanizmalarına yönelik özel gereklilikleri yerine getirmek için ve bunların bir çıkış veya bir ara bağlantı olup olmadığına bakılmaksızın, içlerine aşağıdakilere izin veren çeşitli ek cihazlar yerleştirilebilir:
- mekanizmayı aşırı yükten koruyun,
- manivela kollarının uzunluğunu ayarlayın,
- kolun açısını ayarlayın.
Kaldıraçlara yerleştirilmiş bu tür cihazların birkaç örneğini ele alalım.
 Pirinç. 9. Emniyetin tasarımı
Pirinç. 9. Emniyetin tasarımı
kola kolayca yerleştirilmiş cihaz
yüklü mekanizma
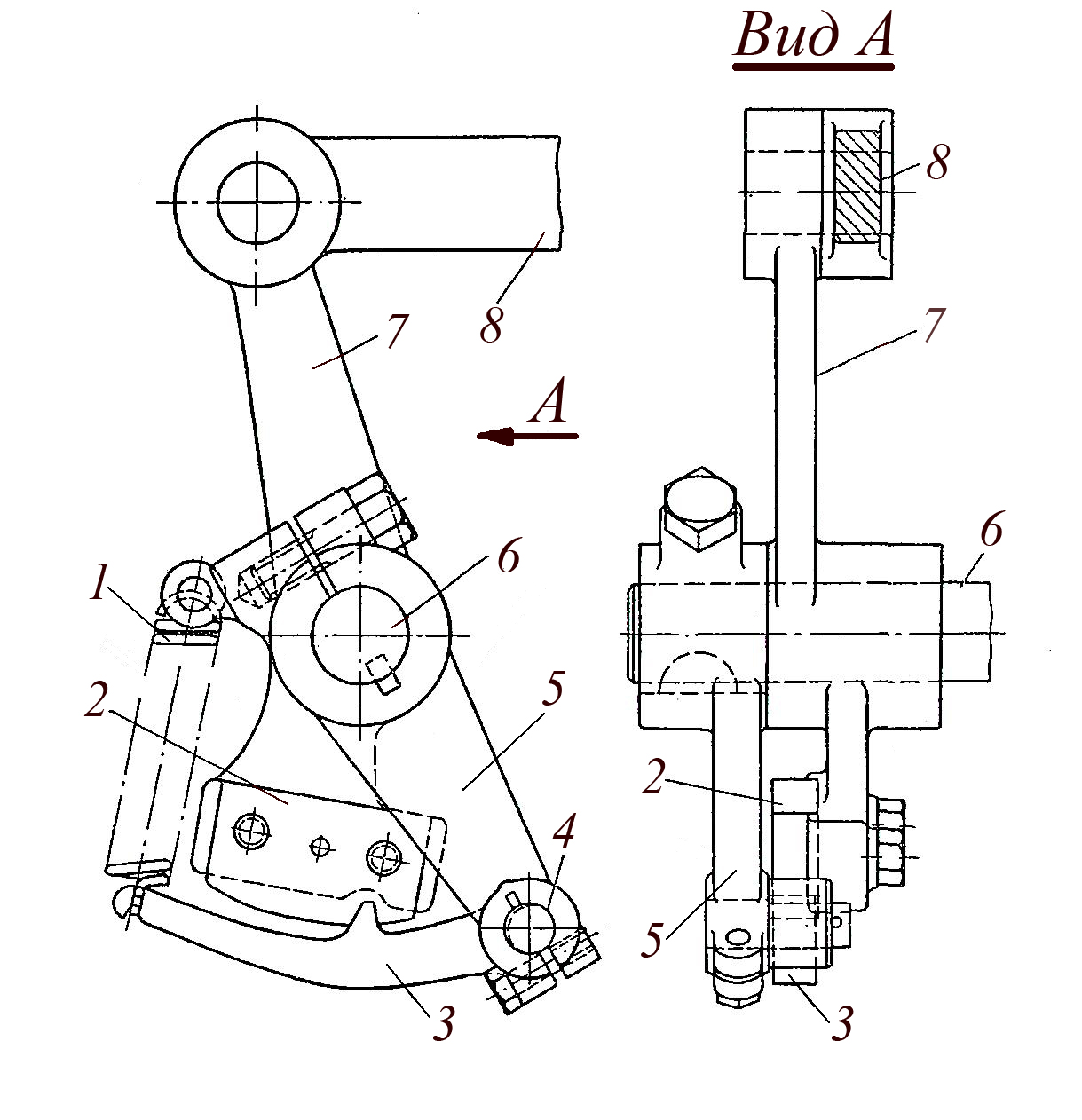
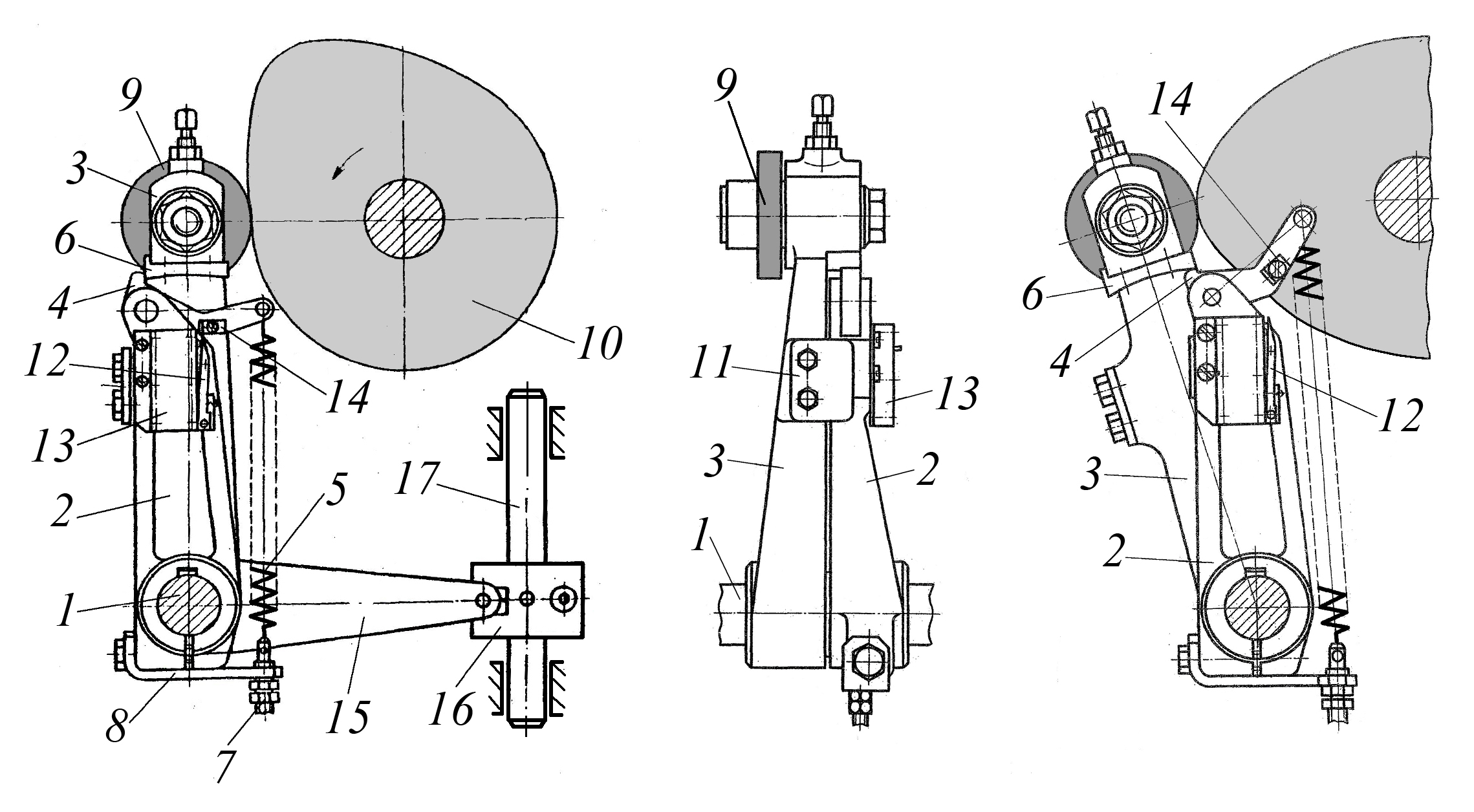
Şek. Şekil 9, tahrik edilen parçasına izin verilenden daha fazla kuvvet uygulandığında kaldıracın hareket iletimini sonlandırmasını sağlayan, hafif yüklü bir mekanizmanın koluna yerleştirilmiş güvenlik cihazının tasarımını göstermektedir. Kolun (7) eksensel olarak monte edildiği ve aynı zamanda bağlantı çubuğuna (8) eksensel olarak bağlı olduğu bir mil (6) içerir, kol (5) kama ve terminal bağlantıları aracılığıyla mile (6) rijit bir şekilde sabitlenirken, kol (5) eksenel olarak eksenel olarak bağlanır. mandal 3, germe yayı 1 tarafından sürekli olarak kol 7 üzerinde sabitlenmiş plakaya 2 bastırılır. Mandalın 3 plaka 2 ile teması, karşılık gelen boşluğa giren bir diş vasıtasıyla gerçekleştirilir. Biyel koluna (8) artan bir kuvvet etki ederse, yay (1) gerilir ve mandal dişi (3) levhanın (2) boşluğundan dışarı çıkar ve koldan (5) kola (7) hareket iletilmez, kol (5) ise mile sabitlenir, sallanmaya devam eder. Artan kuvvetin hareketi durduktan sonra, mandalın 3 dişi tekrar plakanın 2 oluğuna serbestçe girer ve kol 7, hareketi biyel koluna 8 iletirken kol 5 ile bir bütün olarak hareket etmeye başlar.
 Pirinç. 10. Kam kolunda yerleşik kuvvet emniyeti.
Pirinç. 10. Kam kolunda yerleşik kuvvet emniyeti.
Şek. Şekil 10, kam mekanizmasının iticisi olan prefabrik iki kollu manivelaya yerleştirilmiş güvenlik cihazının tasarımını göstermektedir. Bu, mil 1 üzerine sabitlenmiş, kam 10 ile temas halinde olan bir silindiri 9 olan bir külbütör kolundan 3 ve ön kolunun bir çıkıntıya 4 sahip olduğu iki kollu bir maniveladan 2 oluşan, prefabrik bir iki kollu manivela içerir. yay 5, külbütör kolunun 3 dayanağına 6 ve kolun 2 tahrik kolu 15, tahrik çubuğuna 17 sabitlenmiş mahfazaya 16 eksensel olarak bağlanır. Kol 2 üzerinde, mikro anahtar 13, anahtar kolu 12 ile temas halindedir , ayrıca anahtarlama kolu 12 ile etkileşime girebilen durdurucu 14'ün yanı sıra külbütör kolunun 3 makarası 9 bir yay (Şekil 193'te gösterilmemiştir) vasıtasıyla kam 10'a sürekli olarak bastırılır ve etkileşimi iki kollu manivela 2 ile külbütör kolu 3, külbütör saat yönünde döndürüldüğünde, çubuk 11 vasıtasıyla gerçekleştirilir.
Cihaz aşağıdaki gibi çalışır. Mekanizmanın normal çalışması sırasında (aşırı yüklenme olmadığında), kam 10 makaradan 9 külbütör koluna 3 bir sallanma hareketi iletir; bu, durdurucusu 6 ile iki kollu kolun 2 çıkıntısı 4 ile temas ederek bilgi verir sallama hareketinin sonuncusu ve çubuk 17 üzerinde sabitlenmiş gövde 16 ile etkileşime giren tahrik kolu 15, onu öteleme hareketi hakkında bilgilendirir (çubuk bir çalışma vuruşu yapar). Külbütör 2 saat yönünde sallandığında, kaldıracın 3 hareketi çubuk 11 aracılığıyla iletilir ve kaldıracın 2 tahrik edilen kolu 15, çubuğa 17 ters yönde hareket etmesini (çubuk rölantide), onunla etkileşime girmesini söyler. 16 nolu külbütör kolu ve 2 nolu kolun ön kolunun bu karşılıklı düzenlemesi ile, 14 nolu durdurma kolu 12 nolu anahtarlama kolu üzerinde hareket etmekte ve bu da mikro şalteri 13 kapatmaktadır. Yük çubuğa 17 uygulandığında izin verilenin üzerinde artar, bir çalışma vuruşu yaptığında, ikincisi gövde 16 ve iki kollu kol 2 ile birlikte durur ve aynı yönde dönmeye devam eden kam 10, silindir 9 ve külbütör üzerinde hareket eder kol 3, yayın 5 kuvvetinin üstesinden gelerek saat yönünün tersine döner. Bunun bir sonucu olarak, durdurucu (14) anahtarlama kolunu (12) serbest bırakır ve mikro anahtarı (13) kapatır, bu aynı zamanda elektrikli otomatik sistem aracılığıyla makine tahrikini durdurur.
 Pirinç. 11. Dinamik yükleri dengelemek için bir cihaz içeren prefabrik kolun tasarımı.
Pirinç. 11. Dinamik yükleri dengelemek için bir cihaz içeren prefabrik kolun tasarımı.
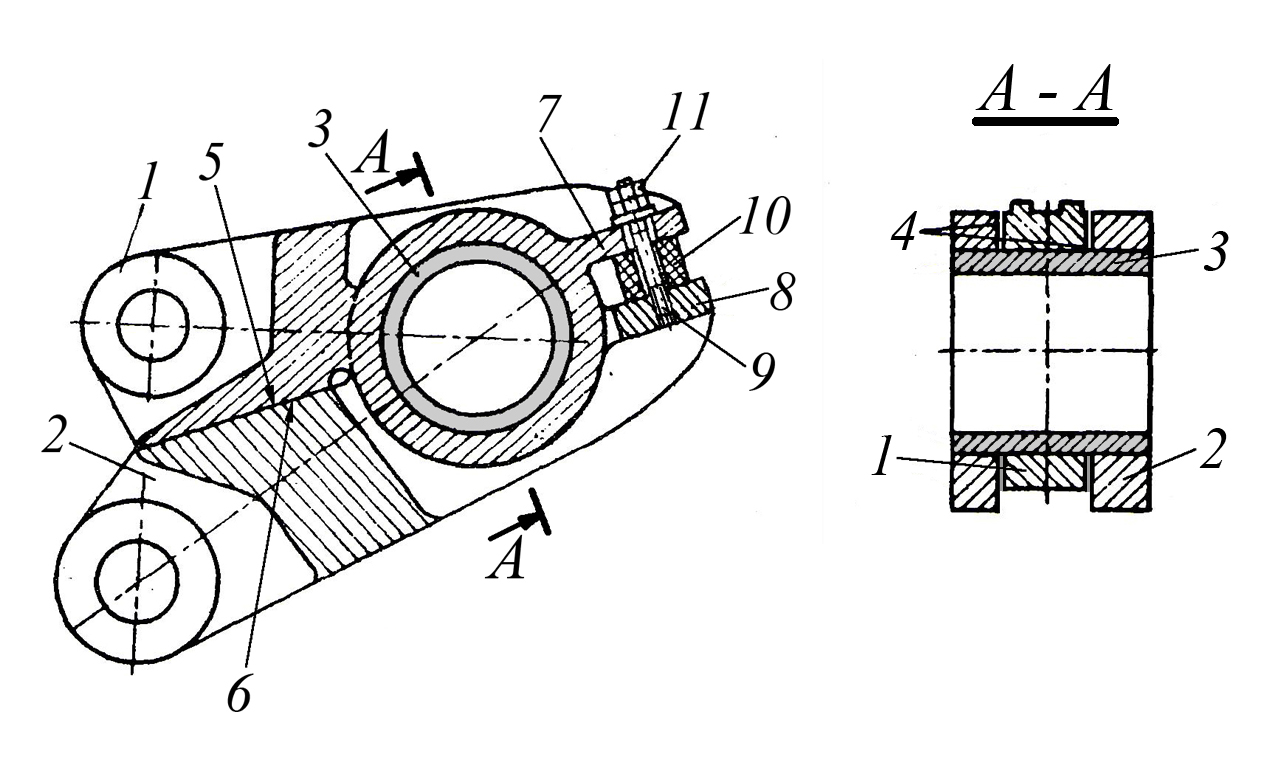
Şek. Şekil 11, kaldıraç mekanizması tarafından iletilen teknolojik kuvvetin hareketine ters yönde hareket eden dinamik yükleri dengelemek için bir cihaz içeren prefabrik kaldıracın tasarımını göstermektedir. Bu kol, kayar manşon 3 ile birbirine bağlanan öncü 1 ve tahrik edilen omuzları 2 içerir ve sevk kolu 1 manşona sabitlenir ve tahrik kolu 2 bunun üzerinde dönebilir. Kol 1 ve 2'nin göbeklerinin uçları arasına sürtünme önleyici halkalar 4 takılır. Kol 1 ve 2'nin teması, destek yüzeyleri 5 ve 6 boyunca gerçekleştirilir. Kol 1 ve 2'nin yüzeylerinde kol, pabuçlar 7 ve 8 yapılır, deliklere bir manşon şeklinde yapılmış elastik ek parça 10 aracılığıyla somunlar 11 aracılığıyla pabuçları sıkan bir pim 9 takılıdır.
Prefabrik bir kaldıraç içeren mekanizmanın çalışması sırasında, tahrik kolundan (1) tahrik koluna (2) teknolojik kuvvet destek yüzeyleri (5 ve 6) yoluyla iletilir. Mekanizmanın çalışması sırasında dinamik yükler meydana geldiğinde, aksi yönde teknolojik kuvvetin etkisiyle, tahrik kolu (2) yüzeyi (6) ile yönlendirme kolunun (1) destek yüzeyinden (5) ayrılmaya başlar ve aynı zamanda yönlendirme koluna (1) göre saat yönünün tersine döner. Sonuç olarak, elastik ek parça Pabuçlar 7 ve 8 arasına sabitlenen 10 sıkıştırılır ve dinamik yükün mekanizma üzerindeki etkisini telafi eder ve ayrıca mekanizma parçalarının ortaya çıkan titreşimlerini etkili bir şekilde sönümler.
 Pirinç. 12. Bir burulma makarası içeren prefabrik kolun tasarımı
Pirinç. 12. Bir burulma makarası içeren prefabrik kolun tasarımı
Dinamik yükleri telafi etmek için.
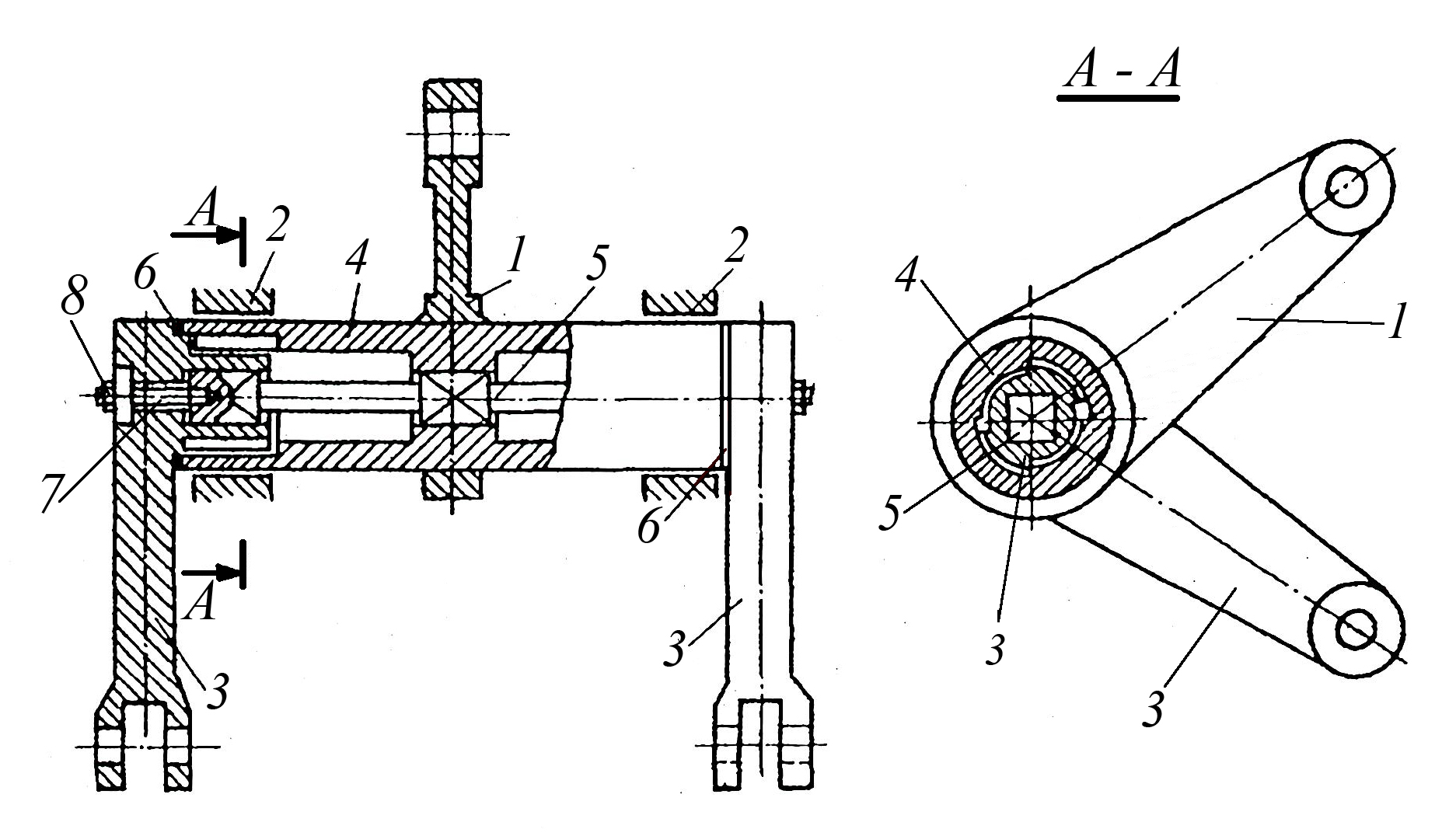
Şek. Şekil 12, kaldıraç mekanizması tarafından iletilen teknolojik kuvvetin hareketine zıt yönde hareket eden dinamik yükleri dengelemek için bir burulma makarası içeren prefabrik kaldıracın tasarımını göstermektedir. Bu kaldıraç, manşona (4) rijit bir şekilde bağlı olan, desteklere (2) döner şekilde monte edilmiş ve uçlarında yer alan ve iç kısımda yer alan bir burulma mili (5) vasıtasıyla ona bağlanan iki tahrik kolu (3) ile temas halinde olan bir tahrik kolundan (1) oluşur. kol Bu durumda, kolun tahrik kolları (3) sürtünme önleyici contalar (6) vasıtasıyla manşonun (4) uçlarına saplamalar (7) ve somunlar (8) vasıtasıyla bastırılır. radyal çıkıntılar. Kolu mekanizmanın bir parçası olarak monte ederken, burulma mili 5 önceden döndürülür, öyle ki tahrik edilen kolların 3 pimlerinin radyal çıkıntılarının uçları ile manşonun karşılıklı radyal oluklarının uçları arasındaki boşluk 4, kaldıraç tarafından teknolojik kuvvetin iletilmesi sırasında temas ettiklerinde seçilir.
Prefabrik kolu içeren mekanizmanın çalışması sırasında, tahrik kolundan (1) manşon (4) yoluyla teknolojik kuvvet ve yarıçap oluklarının uçları, tahrik kollarının (3) pimleri üzerindeki yarıçap çıkıntılarının uçlarına iletilir, ve ikincisi, mekanizmanın çıkış bağlantısına aktararak bir sallanma hareketi gerçekleştirir. Teknolojik kuvvetin hareketinin tersi yönde hareket eden dinamik bir yük oluştuğunda, tahrik edilen kollar (3) ters yönde dönmeye başlar ve ayrıca elastik deformasyonu atalet yüklerinin etkisini azaltan burulma makarasını (5) döndürür. mekanizma parçaları.
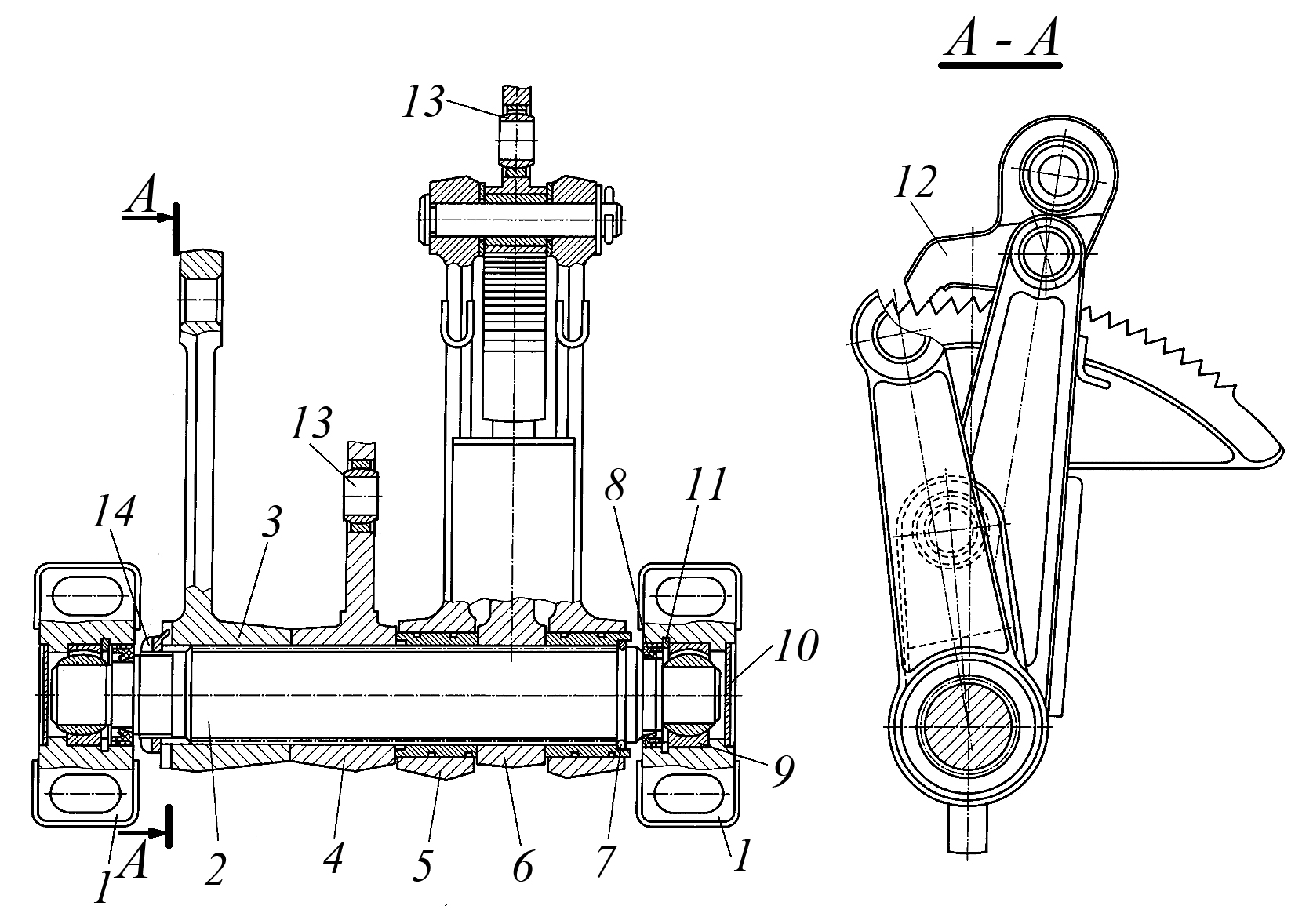
 Pirinç. 13. Yerleşik bir kuvvet güvenlik cihazı ile ağır yüklü bir mekanizmanın monte edilmiş kolunun tasarımı.
Pirinç. 13. Yerleşik bir kuvvet güvenlik cihazı ile ağır yüklü bir mekanizmanın monte edilmiş kolunun tasarımı.
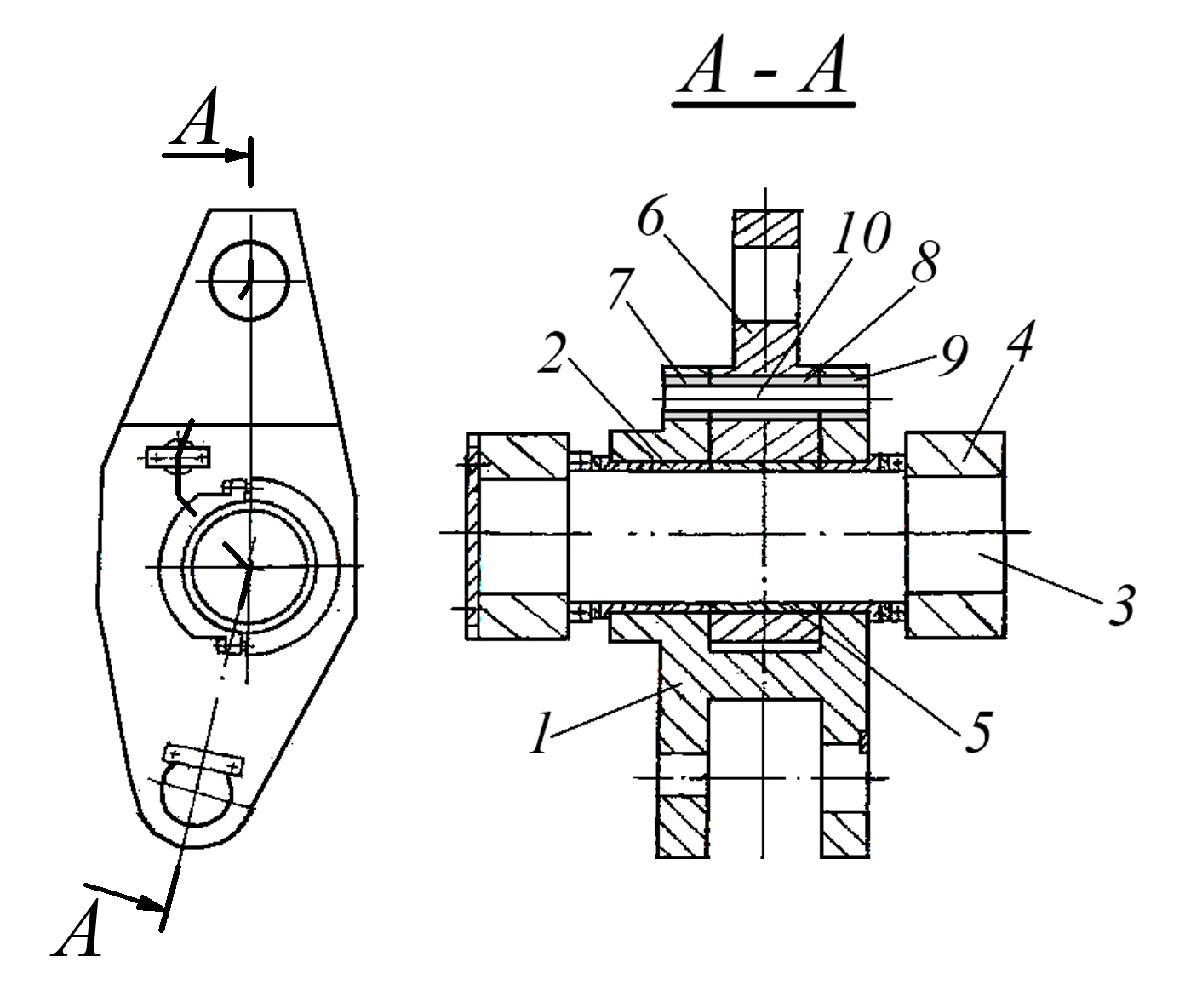
Kaldıraçlara zorla yerleştirilen sigortalar, kullanımlarını oldukça etkili kılan kurtarılabilir tiptedir, ancak ne yazık ki, ağır yüklü kaldıraç mekanizmalarında kullanımları imkansızdır. Yok edilebilir kuvvet sigortaları, ağır yüklü mekanizmaların kollarına yerleştirilmiştir. Şek. Şekil 13'te, yerleşik bir kuvvet emniyet tertibatına sahip prefabrik manivela, çerçeveye (4) rijit bir şekilde sabitlenmiş bir eksen (3) üzerinde bir kayar manşon (2) vasıtasıyla eksenel olarak monte edilmiş bir öncü kol (1) içerirken, manivelanın tahrik kolu (6) da eksenel olarak monte edilmiştir. kayar bir manşon vasıtasıyla aynı eksende 3. Her iki kol, tahrik kolunun 1 deliğine ve tahrik kolunun 6 deliğine bastırılan burçlara 7, 8 ve 9 takılı bir kesme pimi 10 kullanılarak bağlanır. monte edilen kaldıracın ilettiği kuvvet izin verilen değeri aşar, ardından pim 10 kesilir ve tahrik kolunun 1 kolun ön koluyla 6 bağlantısı kesilir ve bu, mekanizmanın daha karmaşık ve pahalı parçalarının kırılmasını önler .
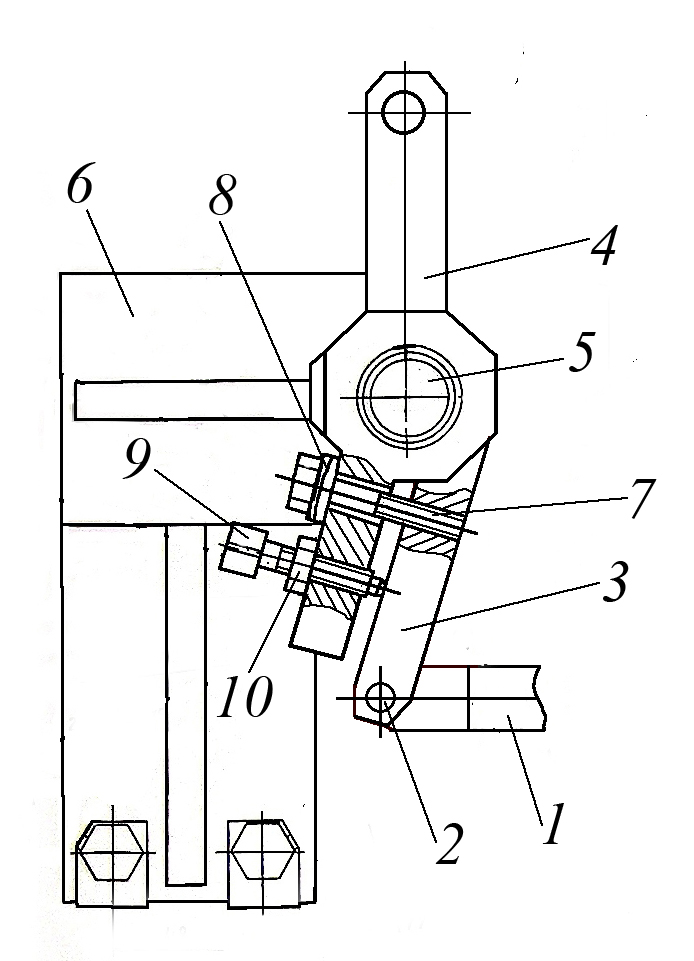
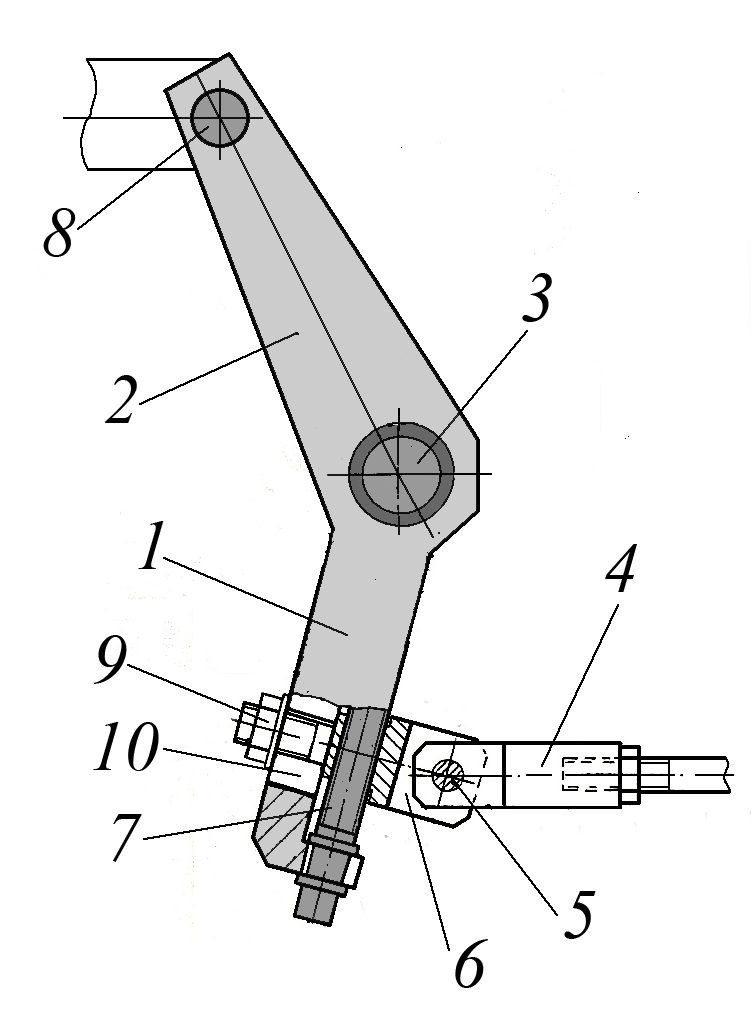 Pirinç. 14. Ön kolunun uzunluğunu ayarlamanıza izin veren, hafif yüklü bir bağlantının koluna yerleştirilmiş bir cihaz.
Pirinç. 14. Ön kolunun uzunluğunu ayarlamanıza izin veren, hafif yüklü bir bağlantının koluna yerleştirilmiş bir cihaz.
Şek. Şekil 14, hafif yüklü bir bağlantının koluna yerleştirilmiş olan ve ön kolunun uzunluğunun ayarlanmasına izin veren bir cihazı göstermektedir. Öncü 1 ve tahrikli 2 koldan oluşan ve eksen 3 üzerine monte edilen bu kaldıraçta, eksen 5 vasıtasıyla tahrik çubuğuna 4 döner şekilde bağlanan ve olukta gerekli pozisyonda sabitlenen bir parmak 6 yerleştirilmiştir. 10 somun 9 ve bir ayar vidası 7 yardımıyla. Aynı zamanda, kaldıracın tahrik edilen kolu 2, eksen 8 aracılığıyla manivela mekanizmasının tahrik edilen bağlantısına döner şekilde bağlanır. Manivela kolunun 1 uzunluğunu ayarlarken, somun 9 gevşetilir, ardından parmak 6, ayar vidası 7 ile manivelanın 1 nolu ön kolunun oluğu boyunca bir tarafa veya diğer tarafa hareket ettirilir ve ardından parmak 6 daha sonra somun 9 ile kilitlenir.
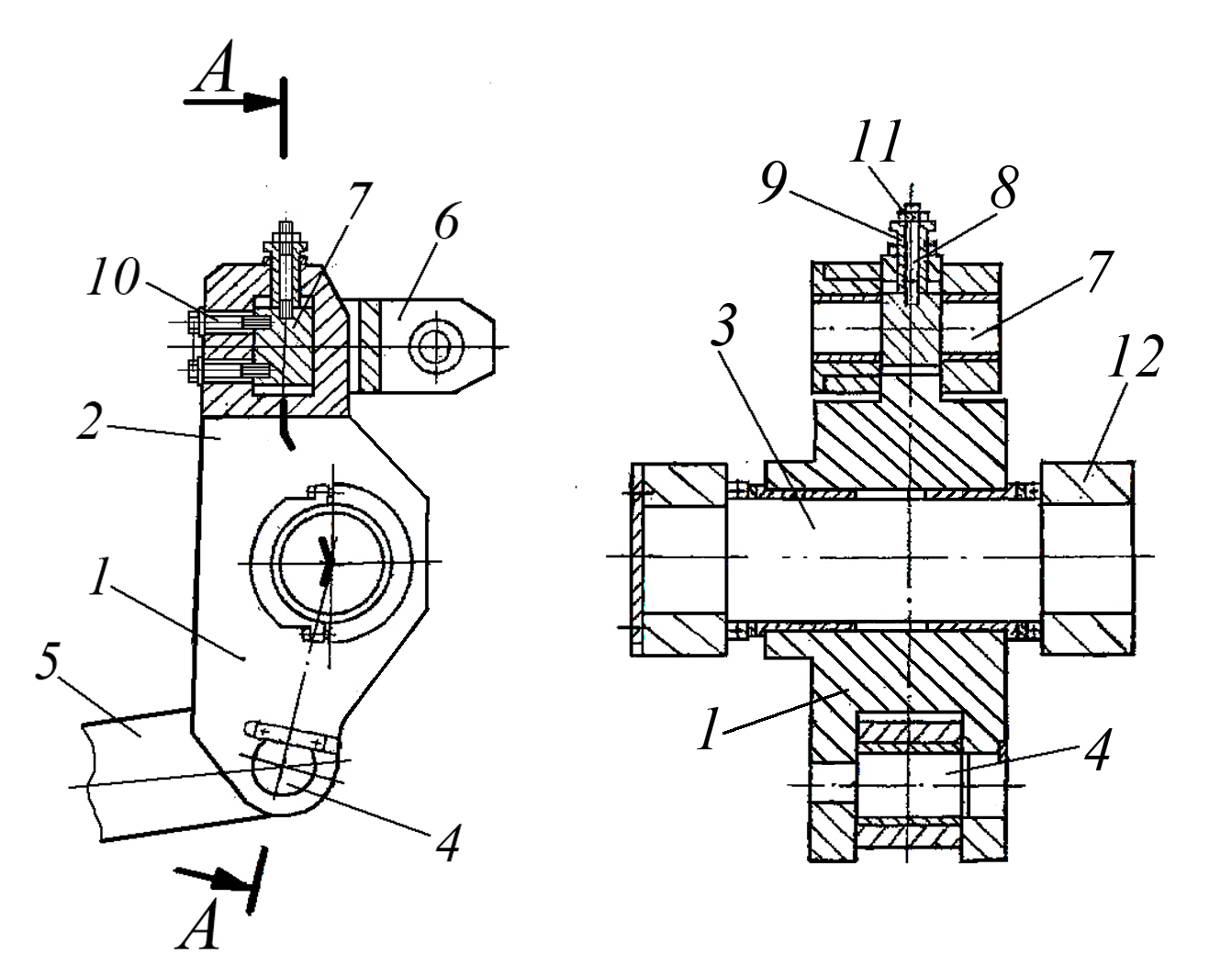 Pirinç. 15. Ağır yüklü bir bağlantının koluna yerleştirilmiş, ayar yapmanızı sağlayan cihazın tasarımı
Pirinç. 15. Ağır yüklü bir bağlantının koluna yerleştirilmiş, ayar yapmanızı sağlayan cihazın tasarımı
tahrik edilen omzunun uzunluğu.
Şek. Şekil 15, tahrik kolunun uzunluğunu ayarlamanıza izin veren, ağır yüklü bir bağlantı mekanizmasının koluna yerleştirilmiş bir cihazın tasarımını göstermektedir. Öncü 1 ve tahrikli 2 koldan oluşan ve eksen 4 vasıtasıyla tahrik çubuğuna eksensel olarak bağlanan ve aks 3 üzerine monte edilen bu kaldıraçta, aks 7 yerleşiktir ve tahrik kolunun penceresine yerleştirilmiştir, kolu 2 tahrik çubuğuna 6 bağlayan. Bu durumda, eksen kolu 3 çerçeveye 12 sağlam bir şekilde sabitlenmiştir. Orta kısmındaki eksen 7 prizmatik bir şekle sahiptir ve tahrik kolunun 2 oluğunda yer alır. eksene (3) olan mesafesinde bir değişiklik sağlayan, ona hareket etme yeteneği veren kaldıraç. Hareketi, kolun tahrik edilen kolunun (2) oluğunda şu araçlarla gerçekleştirilen eksenin (7) bu tasarımı saplama 8 ve dişli burç 9 ve cıvatalar 10 ve somunlar 11 ile gerekli konumda sabitleme, çıkış bağlantısının strokunu ayarlarken gerekli olan kolun tahrik kolunun 2 uzunluğunu değiştirmenize olanak sağlar kaldıracı içeren kaldıraç mekanizmasının.
 Şek. 16 Açısal konumunun değişmediği kol kolunun uzunluğunu ayarlamak için mekanizmanın tasarımı.
Şek. 16 Açısal konumunun değişmediği kol kolunun uzunluğunu ayarlamak için mekanizmanın tasarımı.
Kaldıraç kolunun uzunluğunu ayarlamak için cihazların tasarımının dezavantajı, ayar yapıldığında, bazı durumlarda kabul edilemez olan, kolun salınım eksenine göre açısal konumunun değişmesidir. Şekil 16, açısal konumunun değişmediği kaldıraç kolunun uzunluğunu ayarlamak için mekanizmanın tasarımını göstermektedir. Bu mekanizma, krank mili boynunda bir biyel kolu 2'nin takılı olduğu bir krank mili 1 içerir; , çerçeve üzerine eksenel olarak monte edilmiştir (Şekil 16'da gösterilmemiştir) ve tahrik kolu, eksen 7 boyunca tahrik edilen çubuğa 8 bağlıdır. Aynı zamanda, delikte kol 5 üzerine bir pim 9 döner şekilde monte edilmiştir. bunun 10 nolu kılavuz vidası eksenel yönde takılıp sabitlenmiştir ve dişli ucu, kolun 5 yarıçap oluğunda 4 hareket etme olasılığı ile yerleştirilmiş ve içine sabitlenmiş olan pimdeki 3 dişli delik ile etkileşime girmektedir. Şekil 197'de gösterildiği gibi. İki kollu manivelanın 5 ön kolunun uzunluğu, kılavuz vidanın 10 döndürülmesiyle ayarlanır, bunun sonucunda pim 3 yarıçap oluğunda 4 hareket ederken, Bu oluğun yarıçap şekli, ayarlarken kolun 5 sabit bir konumunu sağlar.
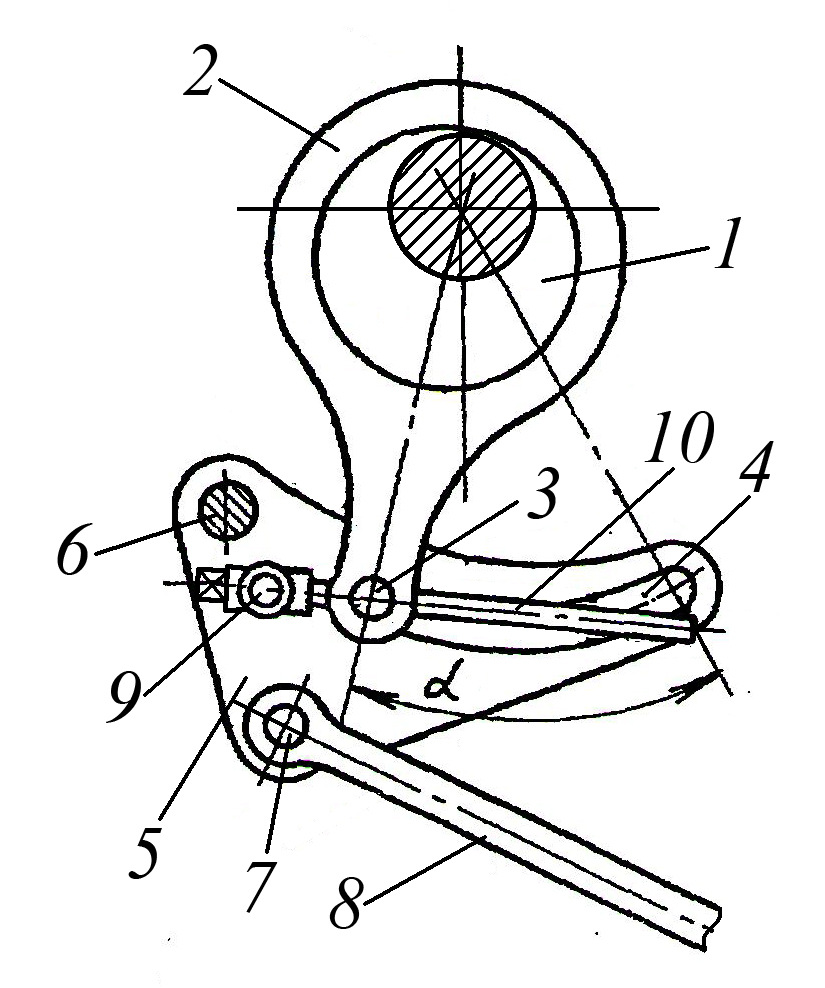
 Şekil 17 Kolun salınım eksenine göre açısal konumunu ayarlamak için cihazın tasarımı.
Şekil 17 Kolun salınım eksenine göre açısal konumunu ayarlamak için cihazın tasarımı.
Teknolojik ekipmanın bir dizi çalıştırma ve yardımcı mekanizmasında, çıkış veya ara bağlantı olup olmadığına bakılmaksızın, kolun açısal konumunu ayarlayarak elde edilebilen çıkış bağlantısının başlangıç konumunu ayarlamak gerekli hale gelir. mekanizma. Şekil 17, kolun salınım eksenine göre açısal konumunu ayarlamak için bir cihazın tasarımını göstermektedir, bu, bir eksen (2) vasıtasıyla ön külbütör koluna (3) döner şekilde bağlanan bir ön çubuk (1) içerir; tahrik edilen iki kollu manivela 4, bir brakete 6 sabitlenmiş bir pime 5 eksenel olarak monte edilmiştir. Aynı zamanda, külbütör kol 3 ve iki kollu manivela 4, monte edilmiş bir cıvata 7 vasıtasıyla birbirine rijit bir şekilde bağlanmıştır. bir dizi küresel rondela 8 ve bir durdurma vidası 9 kullanılarak kol 4 üzerinde, koldaki 4 eksenel konumu bir somun 10 ile sabitlenmiştir. Kol 4 ve kulis 3'ün konumu ile bu tür bir bağlantısı ikincisi değişmeden, kolun açısal konumunu değiştirmenize olanak sağlar
ha 4, cıvata 7 ve vida 9'un vidalanması ve sökülmesiyle gerçekleştirilir.
Ancak bu ayar, kolun konumunu dar bir aralıkta ayarlamanıza olanak tanır. Manivelanın açısal pozisyonunun büyük bir miktarı, bilinen yöntemlerle gerçekleştirilen tahrik çubuğunun uzunluğunu ayarlayarak elde edilebilir.
Rocker kolları
Daha önce de belirtildiği gibi külbütör kolları, kaldıraç çeşitlerinden biridir ve ayrıca kaldıraç mekanizmalarında yaygın olarak kullanılmaktadır. Hareket yönünü değiştirmeden, büyüklüğünü değiştirmek veya kaldıraç mekanizmasının önde gelen bağlantısının daha karmaşık bir hareket yasasını elde etmek için gerekli olduğu durumlarda kullanılırlar. Şek. Şekil 18, kaldıraç mekanizmalarının bir parçası olarak külbütör kollarını kullanmak için çeşitli seçenekleri göstermektedir. Şek. Şekil 18a, kaydırıcının strokunu arttırırken, sallayıcısı tahrik biyel kolunu tahrik edilen biyel koluna eksensel olarak bağlayan kaldıraç mekanizmasının kinematik bir diyagramını göstermektedir. Şek. Şekil 18b, c, d, bir ara ve tahrikli külbütör içeren kaldıraç mekanizmasının kinematik diyagramını gösterirken, bir ara külbütör varlığı, tahrikli külbütör için gerekli hareket yasasını elde etmenizi sağlar. Şek. Şekil 18b'de, her iki külbütör kolu, bağlantı mekanizmasının tahrik edilen biyel koluna eksensel olarak bağlanmıştır ve Şekil 18b'de. 18g'de, ara külbütör tahrik ve tahrik biyel çubuklarına aynı anda bağlanır ve tahrik külbütör tahrik biyel koluna bağlanır.
.
 Pirinç. 18. Aşağıdakileri içeren kaldıraç mekanizmalarının kinematik diyagramları
Pirinç. 18. Aşağıdakileri içeren kaldıraç mekanizmalarının kinematik diyagramları
rocker kolları.
Şek. Şekil 19, ana destek elemanı olarak bir külbütör içeren bir manivela mekanizması temelinde yapılan bir krikonun tasarımını göstermektedir. Eksen (2) vasıtasıyla destek kirişine (3) eksenel olarak bağlanan bir destek pabucu (1) içerir ve ikincisi, eksen (5) yoluyla, bağlantı çubuğuna (9) eksenel olarak bağlanan bağlantı çubuğuna (4) döner şekilde bağlanır. Eksen 8. Ek olarak, destek kirişi 3, biyel koluna 6 döner şekilde bağlanır ve ikincisi, sırayla, eksen 10 boyunca biyel koluna 9 ve eksen 11 boyunca üst destek pabucu 12 ile bağlanır. kriko. Bu durumda, eksenler (7 ve 8) kılavuz vidayla (14) dişli bir bağlantı aracılığıyla eksenle (8) temas halinde olan tutamağa (15) ve düz bir delik ve omuzdan (13) eksenle (7) bağlanır. bu durumda, külbütör kolunun 3 ve bağlantı çubuklarının 4, 6 ve 9 menteşeli bağlantıları, kendi aralarında, eksenlerin 7 ve 8 bağlantı vidası 14 aracılığıyla bağlanmasıyla birlikte bunu mümkün kılan paralelkenar mekanizmasını oluşturur. eforda bir kazanç elde etmek için ve yükseltilip alçaltıldığında pabucun (12) paralel hareketini sağlar.
Kriko aşağıdaki gibi çalışır. Tutamağın (15) kılavuz vida (14) ile birlikte saat yönünde dönmesi eksenlerin (7 ve 8) yatay yönde yakınsamasına yol açarken, saat yönünün tersine dönen külbütör (3) bağlantı çubuklarını (9 ve 10) üst destek pabucu duracak şekilde hareket ettirir 12 kaldırılan yük ile birlikte yükselir. Kılavuz vida 14 ile tutamaç 15 ters yönde döndürüldüğünde, eksenler 7 ve 8 yatay yönde ayrılır, külbütör 3 saat yönünde döner ve bağlantı çubukları 9 ve 10 buna göre hareket ederek destek pabucunu 12 hareket ettirir daha önce kaldırılan yükle birlikte aşağı indirin.
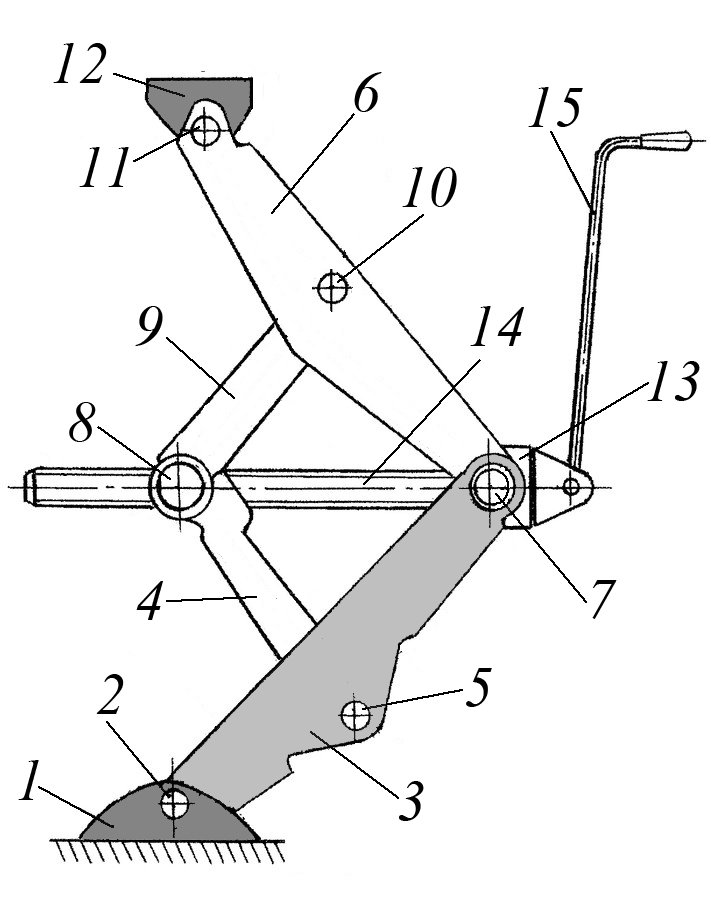 Pirinç. 19. Temelde yapılan krikonun tasarımı
Pirinç. 19. Temelde yapılan krikonun tasarımı
kaldıraç mekanizması.
Bir rafa monte edilmiş bir eksene birkaç külbütör kolu monte ederken, bunlar üzerine sağlam bir şekilde monte edilebilirken, eksenin kendisi de yataklar vasıtasıyla çerçeveye yerleştirilebilir. Şek. Şekil 20, çerçeve üzerindeki braketler vasıtasıyla monte edilen ortak bir aks üzerinde bulunan çok sayıda külbütör temelinde yapılan traktör fren kontrol ünitesinin tasarımını göstermektedir. Traktör kollarının kontrol ünitesi, tahrik kanatlarının (3 ve 4) sert bir şekilde sabitlendiği yivli yüzeyinde sabit bir taban üzerine sabitlenmiş braketlere (1) mafsallı yataklar (9) vasıtasıyla monte edilmiş bir eksen (2) ve ayrıca bir dişli içerir. kendisine eksensel olarak bağlı olan bir mandal 12 ile sektör 6 ve ayrıca tahrik bağlantısı 5 eksenel olarak monte edilmiştir Aks 2 üzerine monte edilen parçaların eksenel sabitlenmesi, tespit halkası 7 ve orijinal somun vasıtasıyla gerçekleştirilir. 14. Bilyeli mafsallar 9 iç kısımda manşonlar 8 ile kapatılmıştır ve dış kısımda muhafazalara 1 bastırılan kapaklar 10 ile kapatılmıştır. Tahrik baklası 5 ve tahrik edilen bakla 4, menteşeli yataklar vasıtasıyla karşılık gelen kontrol çubuklarına bağlanmıştır. 13.
Fren kontrol ünitesi aşağıdaki gibi çalışır. Tahrik baklası (5) saat yönünde döndürüldüğünde, bir yay boyunca hareket eden mandal (12), sivri ucuyla dişli sektöründe (6) belirli sayıda dişi yakalarken, eksen (2) tahrik edilen külbütör kolları (3 ve 4) ile birlikte dişli sektörü 6 sabit kalır. Tahrik baklası (5) saat yönünün tersine döndürüldüğünde, tırnak sivri ucuyla sektörün (6) karşılık gelen dişine dayanır ve böylece eksen (2) ve tahrik edilen külbütör kolları (3 ve 4) ile birlikte, bir kol gibi aynı yönde dönmesini sağlar. bunun sonucunda fren kontrol çubukları hareket ettirilir (Şekil .20'de gösterilmemiştir).
 Pirinç. 20. Yapılan traktör fren kontrol ünitesinin tasarımı
Pirinç. 20. Yapılan traktör fren kontrol ünitesinin tasarımı
ortak bir eksen üzerinde bulunan birkaç külbütör koluna dayanmaktadır.
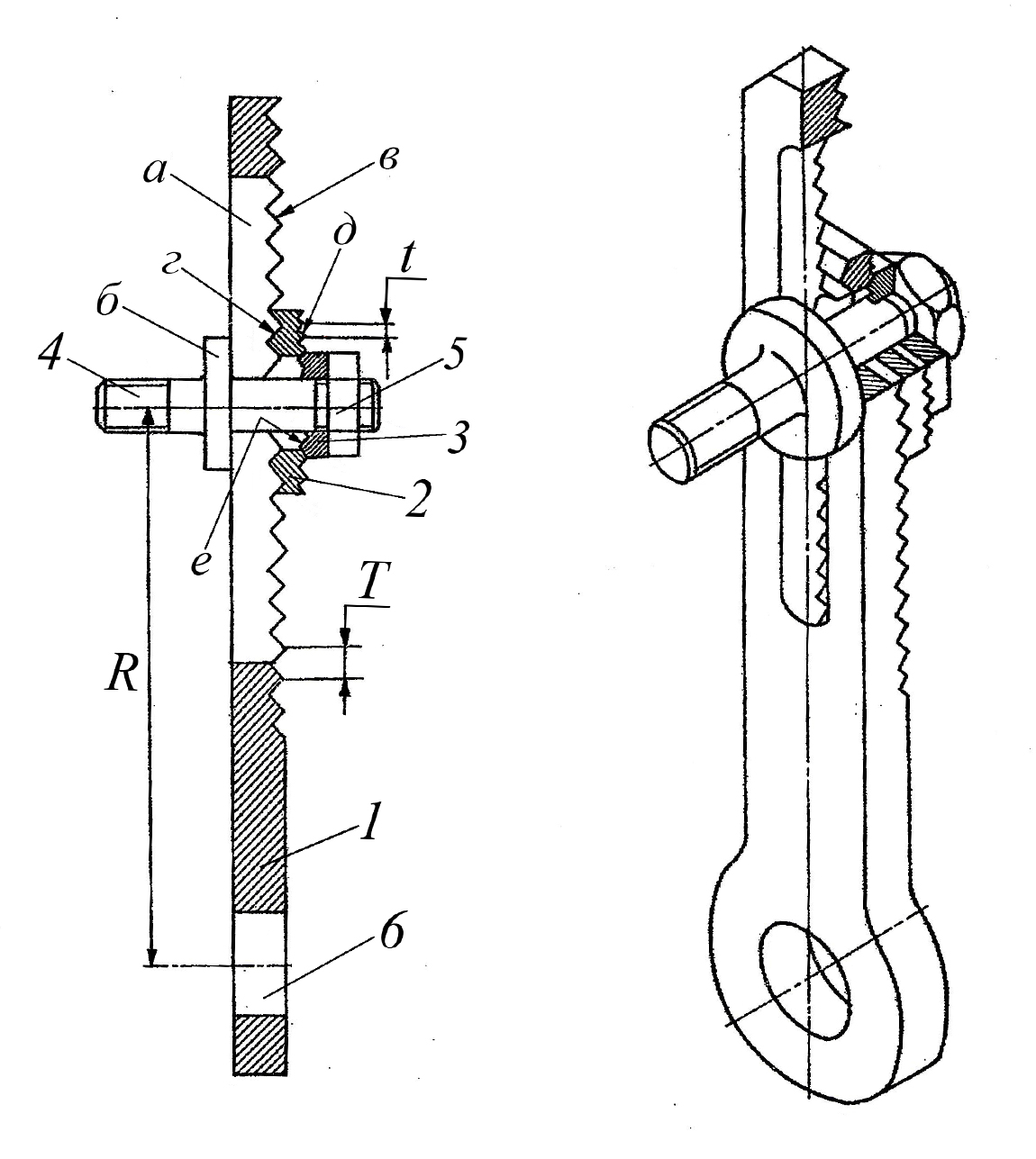
Külbütör kollarının bileşimi ve kolların bileşimi, bu kolları içeren kaldıraç mekanizmalarının yeteneklerini artıran cihazları içerebilir. Çoğu zaman bunlar, külbütör kolunu veya konumunu değiştiren cihazlardır. Şek. Şekil 21, dönme ekseninden külbütör salınım eksenine ayarlanabilir bir mesafe ile külbütör tasarımını göstermektedir. Bu rocker 1 enine yuvalarla yapılmıştır v
adım adım T
ve uzunlamasına oluk A
, yakalı pin 4'ün takılı olduğu B
ve iki dişli uç, pimin sonunda uzunlamasına oluğa geçirilirken A
bir ara rondela 2, bir destek rondelası 3 ve bir somun 5 takılıdır Ara rondelada 2 uzunlamasına bir oluk yapılır, uzunluğu L
aşağıdaki formülle belirlenir: L = d + 2T/(T-t)t
Ek olarak, ara rondela 2 üzerinde, külbütör kolu 1 ile temas ettiği taraftan yuvalar açılmıştır. G
adım adım T
Salıncakta karşılıklı yuvalar ve ara pulun karşı yüzeyinde 2 yuva yapılır D
adım adım T
, çiftleşme spline'ları ile temas halinde olan e
destek rondelasında 3. Külbütörün alt kısmında, içine sabit raflı külbütör dönüşünün karşılık gelen ekseninin monte edildiği bir delik 6 yapılır. kaba mesafe ayarı R
dönme ekseninden külbütör sallanma eksenine, ara rondela 2'nin uzunlamasına olukta kaydırılmasıyla yapılır A
külbütör kolları ve ince ayar - içinde uzunlamasına bir oluğun bulunması nedeniyle destek rondelasının 3 ara rondelaya 2 göre uzunlamasına yer değiştirmesi ile. Bu durumda, ayar değeri aşağıdaki formülle belirlenir:
????R = n1T – n2t;
Nerede:
– n1
, ara pulun 2 yer değiştirdiği diş sayısı,
– n2
, destek pulunun yer değiştirdiği diş sayısı 3.
Parmağın (4) konumunu ayarlama kolaylığı için, rocker'a (1) karşılık gelen bölümlere sahip bir ölçek uygulanabilir.
 Pirinç. 21. Mesafesi ayarlanabilir külbütör tasarımı
Pirinç. 21. Mesafesi ayarlanabilir külbütör tasarımı
döner eksenden külbütör dönüş eksenine.
Bazı kaldıraç mekanizmalarında, sallayıcının açısal konumu, salınım ekseni döndürülerek kontrol edilir. Şek. Şekil 22, konumunu ayarlamanıza izin veren rocker'ın salınım ekseninin tasarımını gösterir. Sallayıcının konumunu düzenlemek için, rafın 1 deliklerine sabitlenmiş salınım ekseni 2, üzerine bir eksantrik manşonun 5 takıldığı bir eksantrik boyun 3 ile yapılır; külbütör 6. Aynı zamanda, eksenin 2 dişli ucuna bir rondela ve eksenel sabitlenmesi için bir somun takılır ve karşı ucunda bulunan aks kafası, her yüzü bir çokyüzlü şeklinde yapılır. aksın (2) belirli bir açısal konumunda, raf (1) üzerinde bir çıkıntı şeklinde yapılmış birleşme yüzeyi (7) ile temas edebilen. aynı veya farklı yönlerde gerçekleştirilebilen döndürülür.
 Pirinç. 22. Külbütör salınım ekseninin tasarımı,
Pirinç. 22. Külbütör salınım ekseninin tasarımı,
konumunu düzenler.
Şek. Şekil 23, üzerine monte edildiği eksene göre açısal konumunu yumuşak bir şekilde ayarlamanıza izin veren, rocker içine yerleştirilmiş bir cihazın tasarımını göstermektedir. Mil 2 vasıtasıyla manivela mekanizmasının tahrik çubuğuna eksensel olarak bağlanan külbütör kolunun 1 içine yerleştirilmiş olan bu cihaz, külbütör kolunun deliğine yerleştirilmiş bir sonsuz çarktan 3 ve dahili yivleri 4 kontaklarından oluşur. aksın (14) yivli yüzeyi ve ayrıca sallanan çarkın eksenine dik olarak yapılmış külbütör deliğine yerleştirilmiş sonsuz vida (5) ile birleşir. Aynı zamanda, kapakta (10) altıgen uçlu (6) solucanın (5) sağ pimi, bir makara seti (9) aracılığıyla, sol ucuna konik dişlerin (7) uygulandığı burçla (8) temas halinde solucan 5 üzerinde yapılan eşleşen dişler, bir bağlantı oluşturur. Sonsuz vidanın (5) merkezi bir konik deliğe sahip sol ucu, yay (11) ve kapak (13) tarafından bastırılan elastik rondelanın (12) karşı yüzeyine temas eder.
Salıncak kolunun (1) eksene (14) göre açısal pozisyonunun ayarlanması aşağıdaki gibi yapılır. Külbütör 1'i bir yönde veya başka bir yönde döndürmek için, altıgen başlı 6 için sonsuz vida 5 bir anahtarla istenen yönde döndürülürken dönüşü, bir yiv vasıtasıyla sabitlenen sonsuz dişli tekerleğe 3 iletilir mil (14) üzerindeki bağlantı sabit kalır ve külbütör (1), eksene (14) göre açısal konumunu değiştirerek istenen yönde döner.
Pirinç. 23. Ayarlamak için yerleşik bir cihaza sahip rocker
açısal pozisyon.
EDEBİYAT.
1. Ignatiev N. P. Azak 2011'i tasarlamanın temelleri.
2. Ignatiev N. P. "Mekanizmaların tasarımı" Azak 2015
Makale, yazarın çalışmasının ilgili bölümlerinden alınan bilgileri kullanır " Tasarım Temelleri» 2011 yılında yayınlanan ve yazarın eseri "Mekanizmaların tasarımı" 2015 yılında yayınlandı
Bir başvuru kılavuzunda "Mekanizmaların tasarımı" kaldıraç ve külbütör tasarım örneklerine ek olarak şunları içerir:
– kam mekanizmalarının, aralıklı hareket mekanizmalarının ve birleşik mekanizmaların kullanımına yönelik tasarım örnekleri ve tavsiyeler,
- yukarıdaki mekanizmaların ana parça türlerinin kullanımına ilişkin tasarım örnekleri ve öneriler: krank milleri, biyel kolları, sürgüler, kamlar ve bunların döner mafsalları,
- tahrik mekanizması tipini seçmek için öneriler ve uygulama örnekleri,
– mekanizmaların hesaplanması,
- bir kam otomatik makinesinin çalışmasının bir siklogramının oluşturulmasına bir örnek,
– mekanizmaları tasarlamak için teknik,
- mekanizmalara ve bunların tipik parçalarına doğruluk gereksinimleri atamak için tavsiyeler,
– bir mekanizmanın tasarımına bir örnek
Makalenin tam sürümünü satın almak için sepete ekleyin,
Makalenin tam sürümünün maliyeti 50 ruble.